






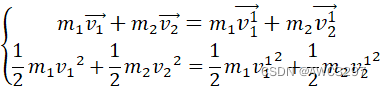

以上是动量守恒定律和能量守恒定理的表述
但是会发现3个恒等式没办法求出4个未知量(![]() 代表的是球1碰撞后更新的速度的x方向的分量,右上角的1可以看作是撇)
代表的是球1碰撞后更新的速度的x方向的分量,右上角的1可以看作是撇)
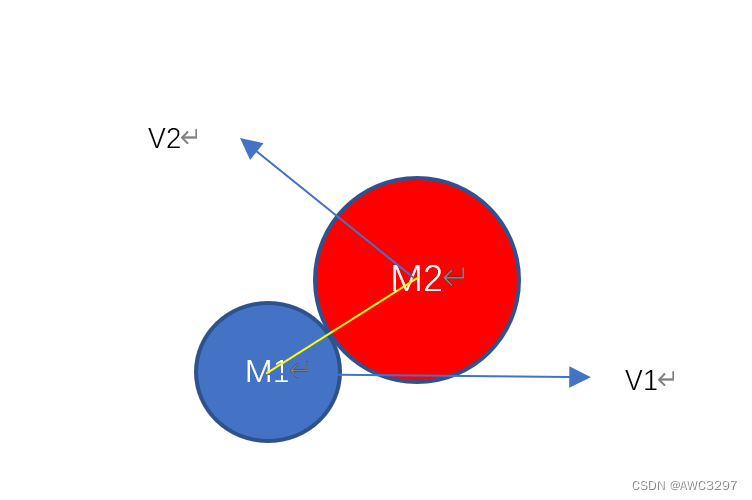
这是因为没考虑到他们是球体碰撞。动量的变化量一定是沿着球心连接线的方向,而这个方向一定与两个球的相对位置有关。因此可以再加一个表达式:

此处(x1,y1)(x2,y2)是两个小球的球心坐标
![]()
因此可以得到:
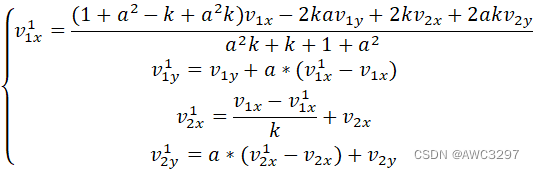
算出第一个![]() ,其余方向的速度就可以全部算出。
,其余方向的速度就可以全部算出。
PS:结果的推导本人自己算过,从程序运行来看效果还可以,但不保证推导结果正确。毕竟只算了两次,第一次还算错了。还有投影速度方向来计算的公式,这种比较多,且很多经过验证,建议可以使用这类公式。

















 2584
2584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









