







简介
在实际使用过程中,人们发现AI摄像头定位精度不高,且受天气和光照强度的影响较大。激光雷达对环境敏感度高,有机械转动部件、寿命和可靠性有影响。毫米波雷达横向精度较低,且无法精确区分目标类型。三者都有其局限性。
基于这一现象,基于激光雷达与传感器融合的方案孕育而生,这两者的融合可以弥补各传感器的缺点,获得更高精度的感知结果。
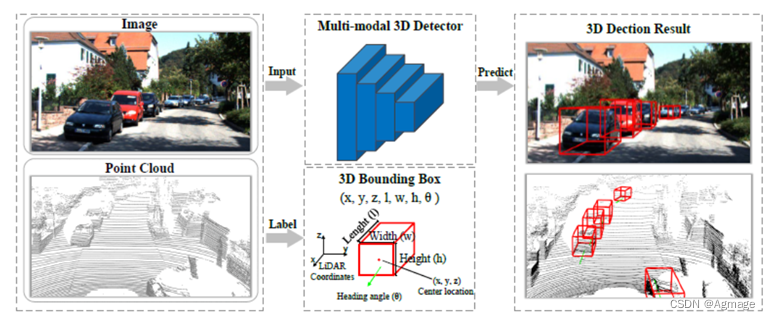
传感器选型介绍:
摄像头:
解析力:
其实解析力就是和摄像头的分辨率基本上是线性相关的,我们看一个摄像头的分辨率高不高,最重要的就是几百万像素的摄像头。摄像头解析力是指摄像头能够捕捉和显示图像的细节程度。它通常以像素(Pixel)为单位进行衡量,即图像的水平和垂直方向上的像素数量。解析力越高,摄像头能够捕捉到更多的细节,图像更加清晰。

在自动驾驶领域中,摄像头的解析力对于感知和理解周围环境至关重要。较高的解析力可以提供更多的细节信息,帮助自动驾驶系统更准确地检测和识别道路标志、行人、车辆等物体,从而更好地做出决策和规划。
然而在雷视融合中,并不是摄像头的解析力越大越好,更高的画质虽然意味着保留了更多的细节,都是也同时意味着加大了计算设备的算力需求和功耗需求,在自动驾驶领域或工业生产领域,用来计算的芯片往往是嵌入式的,算力低的同时功耗要求也很严格,即使选购了大解析力的相机,算法不能完全利用起来也造成了浪费。所以在雷视融合相机选型中,相机的解析力适配算力很关键。
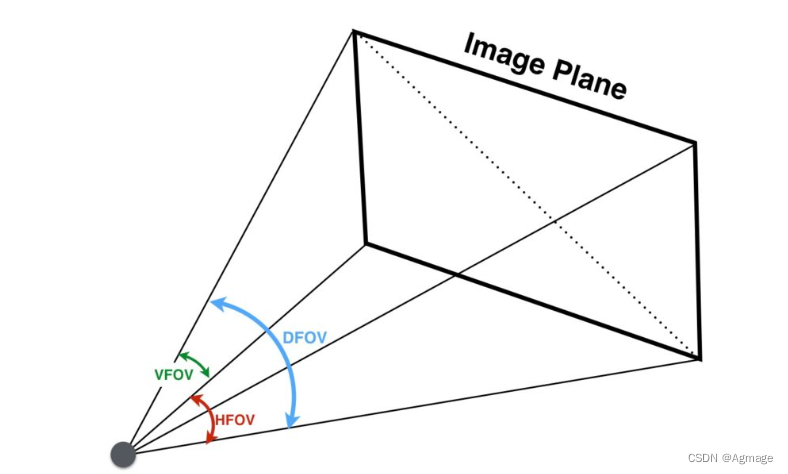
水平/垂直视场:
摄像头的水平视场(Horizontal Field of View,FOV)指的是摄像头能够水平范围内捕捉到的景物角度。垂直视场(Vertical Field of View,FOV)则表示摄像头能够垂直范围内捕捉到的景物角度。这两个参数决定了摄像头能够看到的景物范围。
在雷视融合中,选择摄像头的水平和垂直视场需要根据周边环境、安全性要求、成本和处理需要等因素进行考虑。不同的环境可能需要不同的视场范围。例如,在智慧工地中,需要更广阔的视场范围,以便捕捉到更多的车辆、行人和物体。而在高速公路自动驾驶中,视场范围可以相对较窄,主要关注前方车辆和交通标识即可。更广阔的视场可以提供更多的信息,有助于准确感知和识别周围环境。在自动驾驶中,安全性是首要考虑因素,因此会选择具有较宽视场范围的摄像头可以提高系统的感知能力。摄像头的视场范围会影响图像分辨率和处理需求。较宽的视场范围意味着需要更多的像素来捕捉更多的景物,这可能增加系统的成本和处理复杂性。因此,需要在成本和性能之间进行权衡。一般在自动驾驶中会选择不同的摄像头视场组成多个摄像头分别完成不同的任务,在工业生产领域,安防中会选择宽广的视场来进行监控,在缺陷检测等需要选择窄视场来进行聚焦。
光圈:
摄像头的光圈(Aperture)是指镜头的光线进入孔径的大小。它影响到摄像头的曝光和景深效果。光圈大小通常用一个称为F数的值来表示,例如F/1.8、F/2.8等。较小的F数表示光圈较大,光线进入的量更多,而较大的F数表示光圈较小,光线进入的量较少。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











