







 本文详细介绍了AGV/RGV/AMR/无人叉车移动机器人使用的SE-0526激光避障雷达传感器的安装准备、尺寸参数、检测能力以及安装要求,包括空间预留和安装角度建议等。
本文详细介绍了AGV/RGV/AMR/无人叉车移动机器人使用的SE-0526激光避障雷达传感器的安装准备、尺寸参数、检测能力以及安装要求,包括空间预留和安装角度建议等。
SE-0526广泛应用于搬运机器人,AGV|RGV小车导航、避障、定位等领域,本文重点介绍AGV|RGV|AMR|无人叉车|移动机器人激光避障雷达传感器SE-0526安装步骤与方法。
一、准备工作
1、包装清单
请确认产品包装箱外部标签上的产品名称和产品型号是否与您购买的一致;
请确认通过产品外部标签来确定产品名称和型号;
请确认开箱后以下部分的物品是否齐全,如不齐全请联系供应商;


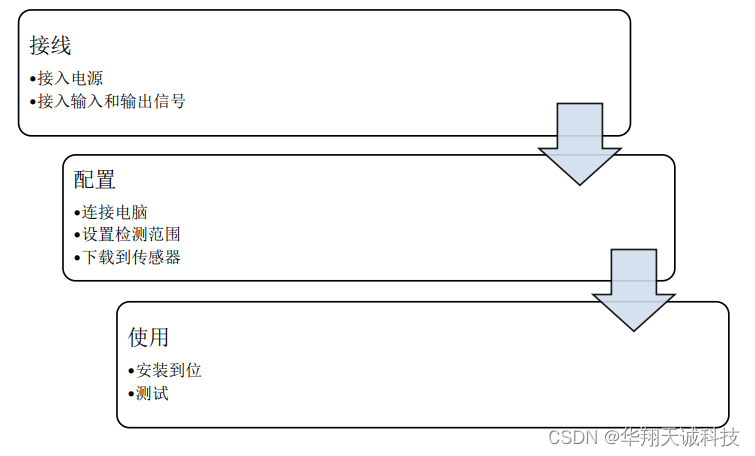
3、使用步骤
二、安装
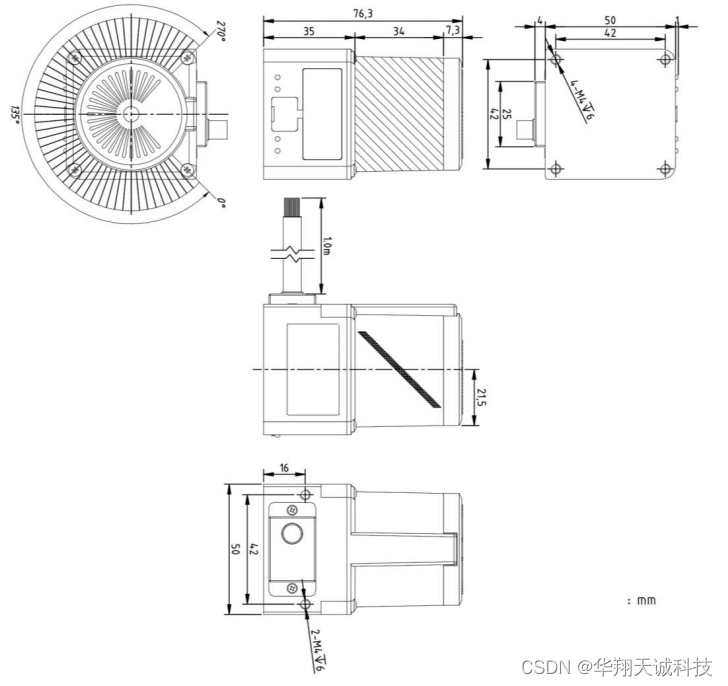
1、尺寸参数
2、检测能力
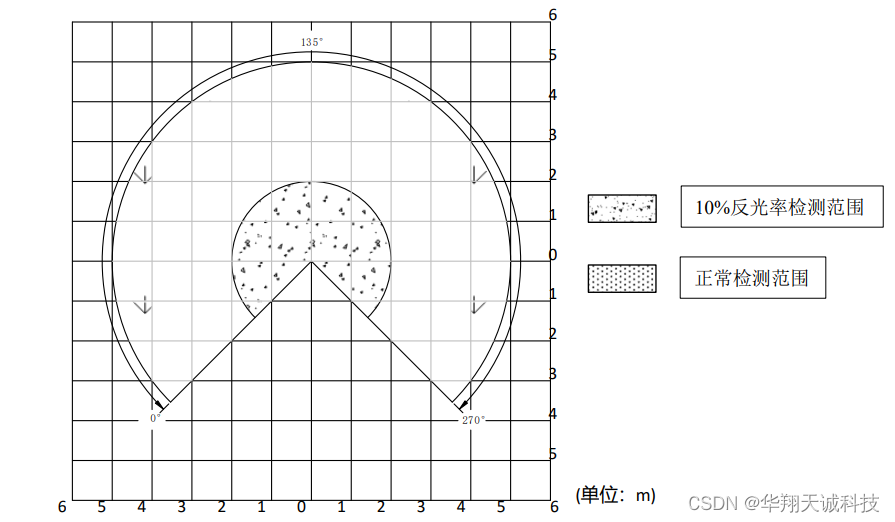
2.1、检测范围
2.2、检测物体大小
激光扫描传感器中有一个旋转镜,激光光束脉冲会随这旋转镜不停的以 0.5 度转角发射,从而可以扫 描一个扇形的区域。发射出的激光光束会覆盖一个扇形面,从而可在最大 270°的区域内识别物体。

- 角度分辨率是0.5度。
- 检测物体最小分辨率D,单位mm
分辨率D试算公式:分辨率D=2πL0.5360
L:任意点到激光传感器的距离,也是被测点到激光传感器的距离。
如:当设置的长度L为1000mm时,此时能检测物体最小分辨率为8.72mm。
由于激光扫描传感器采用主动扫描原理,所以无需外部接收器和反射器。这样可以带来以下优点:
※安装工作量更少
※可以简单地调整监视区使之适应机器的需要保护的区域
※与接触式传感器(接触式防撞)相比,非接触式扫描几乎没有磨损
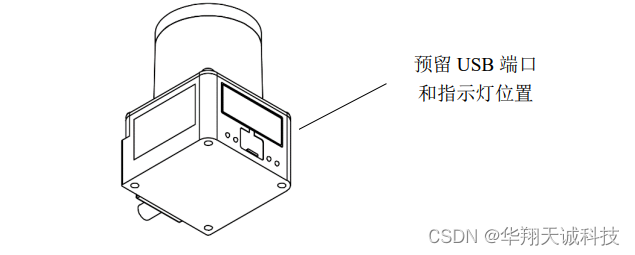
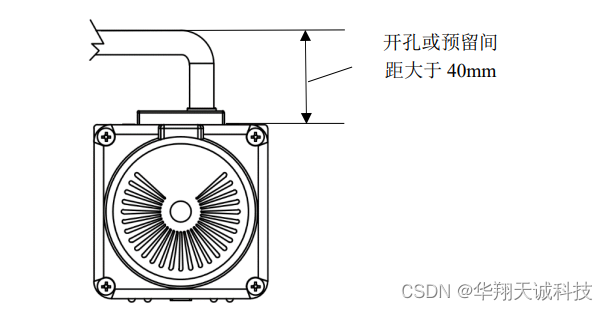
激光扫描传感器自带电缆,电缆位置需要预留出线位置,避免电缆过度折弯。激光扫描传感器底座前方应 该留出 Micro USB 插孔位置和指示灯位置,方便进行连接调试和观察传感器状态。
3.1、预留前部空间要求
3.2、预留后部空间要求
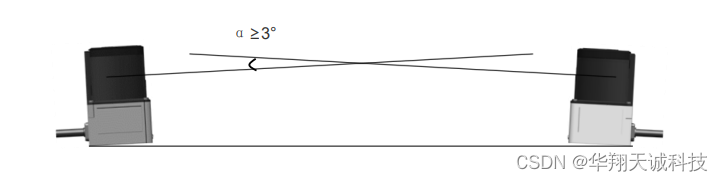
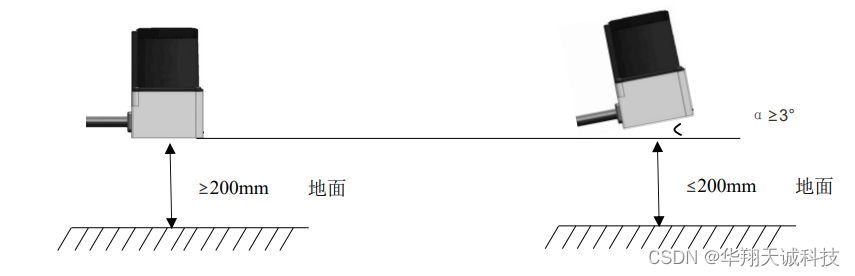
3.3、两个以上传感器错开安装时,建议倾角 3 度以上,防止互相干扰。
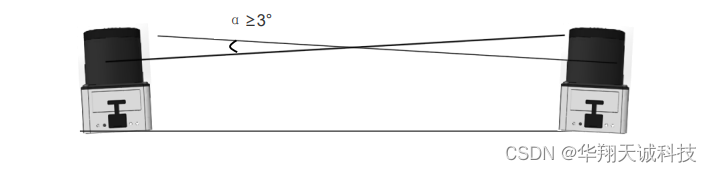
3.4、两个以上传感器交叉安装时,建议倾角 3 度以上,防止互相干扰。
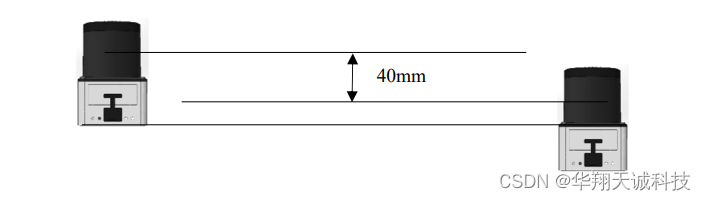
3.5、两个以上传感器交叉安装时,建议错开 40mm 以上,防止互相干扰。
3.6、由于传感器光斑锥形发散状发射,建议激光扫描传感器安装离地高度≥200mm,若安装离地高度<200mm 时,请将 激光扫描传感器向上倾斜 1~3°
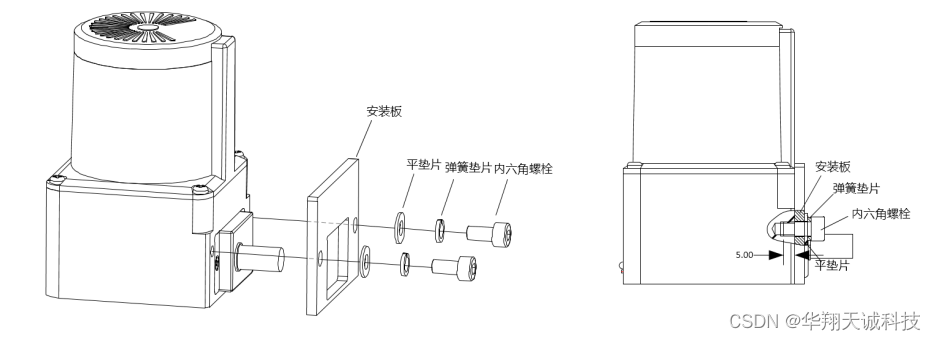
3.7、正面安装示意图
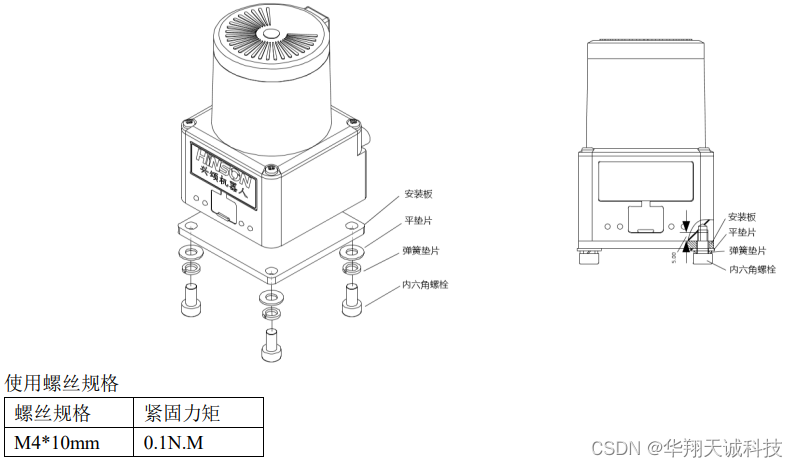
3.8、底部安装示意图
更多关于AGV|RGV|AMR|无人叉车|移动机器人激光避障雷达传感器SE-0526安装步骤与方法,华翔天诚科技欢迎您的交流与咨询!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









