







 本文档详细介绍了DMC2210运动控制卡的初始化、脉冲输出模式设置、梯形速度曲线控制、S形速度曲线控制以及回原点、多轴运动等功能。通过实例展示了如何进行点位运动、连续运动、速度控制和原点校准等操作,适用于机器人、自动化设备等领域。
本文档详细介绍了DMC2210运动控制卡的初始化、脉冲输出模式设置、梯形速度曲线控制、S形速度曲线控制以及回原点、多轴运动等功能。通过实例展示了如何进行点位运动、连续运动、速度控制和原点校准等操作,适用于机器人、自动化设备等领域。
**运动控制函数:**
初始化控制卡(d2210_board_init)函数 ==》
脉冲模式设置(d2210_set_pulse_otmode)函数
中断控制函数(若有) <<——>>用户定义中断程序
运
动
过 运动函数调用(d2210_t_vmove)函数
程 运动状态检测(d2210_check_done)函数
处
理 等等......... ==
最终要释放控制卡调用(d2210_board_close)函数
初始化函数:WORD.d2210_board_init(void)
功能:为DMC2210运动控制卡分配系统资源并初始化控制卡
返回值:卡数(0-8),0表示没有卡
关闭操控卡函数:void d2210_board_close(void)
功能:释放控制卡占用的系统资源,当程序结束时必须调用此函数
无参数 无返回值
例程:
初始化:cardcount=d2210_board_init();
关闭控制卡: d2210_board_close();
脉冲输出模式的设置:
用户在调用运动控制函数前应先调用d2210_set_pulse_outmode函数来设置指令脉冲模式。
指令脉冲包括两项基本信息:电机运转距离即脉冲数,和电机转方向。
有两种基本指令模式:(1):脉冲/方向模式(即PULSE/DIR模式)
(2):双脉冲模式(即CW/CCW模式)
脉冲输出方式的设置函数:
void d2210_set_pulse_outmode(WORD axis,WORD outmode)
功能:设置指定轴的脉冲输出方式
参数: axis:轴号
outmode:脉冲输出方式选择
在DMC2210函数库中距离或位置的单位为脉冲;速度单位为脉冲/秒;时间单位为秒
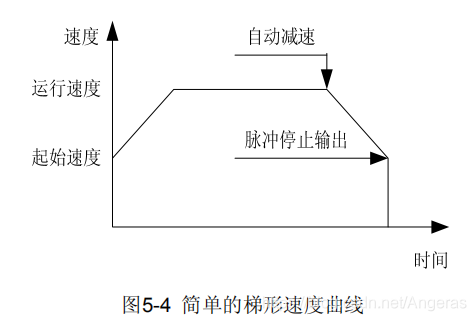
梯形速度曲线设置函数:
void d2210_set_profile(WORD axis,double Min_Vel,double Max_Vel,double Tacc,double Tdec)
功能:设定梯形速度曲线的起始速度、运动速度、加速时间、减速时间
参数:axis:轴号
Min_Vel:起始速度,或简称为低俗
Max_Vel:运行速度,或简称为高速
Tacc:总加速时间(Time of Acceleration)
Tdec:总减速时间(Time of Deceleration)
无返回值
(图5-4)
以对称梯形曲线为速度的位移控制函数:
void d2210_t_pmove(WORD axid,Long Dist,WORD Posi_mode)
功能:让指定轴以对称梯形曲线速度做点为运动
参数:axis:轴号
Dist:运动距离(Distance)
Posi_mode:坐标模式,相对位移为0,绝对位移为1
无返回值
以非对称梯形曲线为速度的位移控制函数:
void d2210_ex_t_pmove(WORD axis,Long Dist,WORD posi_mode)
功能:让指定轴以非对称梯形的曲线速度作点位运动
参数:axis:轴号
Dist:运动距离(Distance)
Posi_mode:坐标模式,相对位移为0,绝对位移为1
无返回值
例程:执行以非对称梯形速度曲线作点位运动
d2210_set_profile(0,500,6000,0.02,0.01) 设置0号轴起始速度为500脉冲每秒,运行速度为6000脉冲每秒,加速时间为0.02秒,减速时间为0.01秒
d2210_ex_t_pmove(0,5000,0)设置0号轴运动距离为5000个脉冲,相对坐标并开始执行运动
单轴运行中改变当前运行速度的函数:
void d2210_change_speed(WORD axis,double curr_vel)
功能:当指定轴在作连续运动时,调用此函数可以改变当前的运动速度,并立即按所指定的速度连续运行
参数:axis:轴号
curr_vel:新的运动速度
无返回值
改变目标位置函数:
void d2210_rest_target_position(WORD axis,long dist)
功能:在运动中改变目标位置,若目标位置比当前位置远,则继续向前运动,到达新目标位置后,停止脉冲输出;若目标位置比当前位置近,控制卡将先停止当前运动,然后反方向运动至目标位置。注意:该函数仅能在相对位置模式下使用
参数:axis:轴号
dist:新的位置
无返回值
例程:改变速度,改变终点位置
d2210_set_profile(0,500,6000,0.01,0.02) //设置梯形曲线运动
d2210_ex_t_pmove(0,5000,0)//设置距离、相对坐标模式
if(“改变速度的条件
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5289
5289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









