







图像条纹噪声消除
条纹噪声
sensor中由于传感器的差异产生固定模式噪声(FPN),FPN与条纹噪声有相似之处。
条纹噪声(Stripe noise )是由于红外焦平面阵列(infrared focal plane array, IRFPA)中读出电路的不同而造成的。因为IRFPA上位于不同列的传感器采用不同的读出电路,读出电路偏置电压的差异会在红外图像上产生明暗。
目前针对IRFPA响应的非均匀校正算法主要包括****基于标准源定标*和*基于场景的校正方法****两类。
基于参考源定标类方法是早期提出的一种易于实现且较有效的方法。典型的如一点校正法,两点校正法,多点校正法等。这类方法一般通过更新非均匀性校正算法的参数实现,且需要一个额外的电子设备,进行多次重复定标。不但增加了系统复杂度,还会打断图像采集过程。
基于场景的非均匀性校正算法,如基于恒定统计算法,神经网络算法。这些基于场景的算法主要根据实际场景提取校正系数,可以自适应地校正探测器因温度和时间漂移引起的变化。为了估计出可靠的参数,这类算法需要利用一组图片进行提前训练,一般收敛速度较慢,并且场景的帧间差异要足够小。
目前的非均匀性矫正算法的缺点:
1、收敛速度慢
2、不能实时性处理
3、条纹噪声具有方向性(水平垂直)和贯穿性
预设条纹噪声模型
假设图像中像素
(
i
,
j
)
(i, j)
(i,j)的值
z
(
i
,
j
)
z(i, j)
z(i,j)表示为:
z
(
i
,
j
)
=
A
(
i
,
j
)
x
(
i
,
j
)
+
B
(
i
,
j
)
+
v
(
i
,
j
)
z(i, j)=A(i, j)x(i, j)+B(i, j)+v(i, j)
z(i,j)=A(i,j)x(i,j)+B(i,j)+v(i,j)
其中,
A
(
i
,
j
)
A(i, j)
A(i,j)和
B
(
i
,
j
)
B(i, j)
B(i,j)分别为第
(
i
,
j
)
(i, j)
(i,j)个传感器的增益和偏置;
x
(
i
,
j
)
x(i, j)
x(i,j)是传感器捕获的入射红外辐射;
v
(
i
,
j
)
v(i, j)
v(i,j)表示电子噪声;增益$ A(i, j)$表示固定模式噪声中的乘性分量;偏置分量
B
(
i
,
j
)
B(i, j)
B(i,j)表示固定模式噪声中的加性分量。
评价指标
粗糙度,评价非均匀性校正效果,指标越小表示条状噪声越少,处理效果越好
θ
=
h
1
∗
P
+
h
2
∗
P
p
\theta = \frac{h_1 * P+h_2 * P}{p}
θ=ph1∗P+h2∗P
其中,
h
1
=
[
−
1
,
1
]
h_1=[-1,1]
h1=[−1,1]是水平方向掩膜,
h
2
=
h
1
′
h_2 = h_1^{'}
h2=h1′是垂直方向掩膜,
∗
*
∗代表卷积
基于频率滤波
首先通过傅里叶变换从空域转到时域,在时域与高斯低通/带通滤波器进行卷积,进行低通/带通滤波,剔除高频信息或者指定位置的信息,通过imageJ软件测试效果
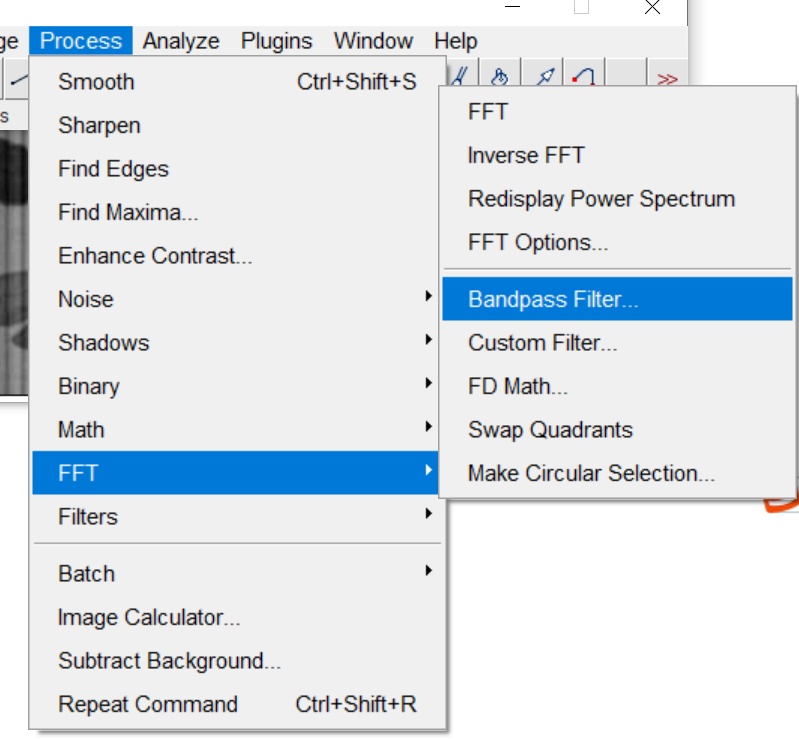 !
!
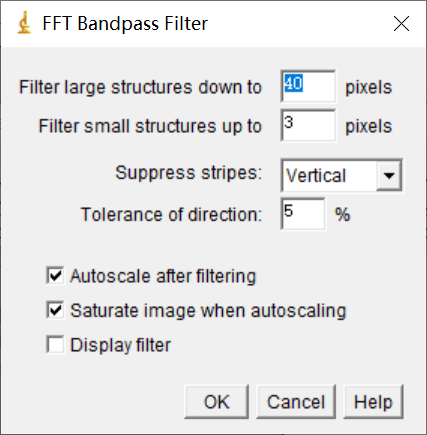
图、imageJ软件处理步骤
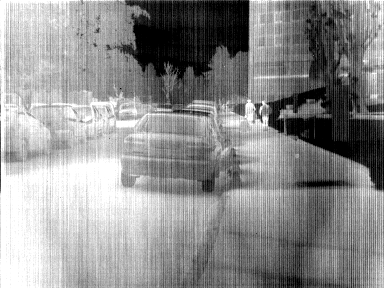

损失了一部分细节,频域滤波器的参数可以精调
基于空域滤波
非均匀校正算法具有普遍性,对于条纹噪声,有时达不到满意的效果。因此一些文献又提出了针对性更强的算法,例如基于小波的改进算法,基于全变分理论的非均匀校正算法,基于双边滤波的算法
这里就不展示了,空域降噪为了不损失细节强调保边效果
感兴趣可以留言讨论,也可以参考大佬的文章
https://www.cnblogs.com/Imageshop/p/13380435.html
参考:
《基于空时域级联滤波的红外焦平面条状噪声消除算法》



















 2167
2167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











