







本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组准备全过程——1到手测试
大家好,今天给大家带来的是购买到小车或者说RDK X3之后直接快速体验,今天主要围绕官方的快速入门手册进行逐步测试
1.知识补充1
在这里首先要给新手小白补充几个只是首先是,如何烧录镜像,你可以理解为,为你的开发板进行加载一个系统,你也可以理解为就是给你笔记本装一个win12系统(哈哈哈虽然现在还没有人使用,我意思是一个新的系统你不知道的哈哈)
话不多说进入正题!
1.1烧录软件
首先你要装一个系统,你肯定需要使用一个软件对吧,类似大家电脑出问题去找师傅修电脑,你会发现他拿一个U盘一顿操作,然后电脑开机了但是崭新崭新。
接下来,拿出你买的套件里面的SD卡和读卡器
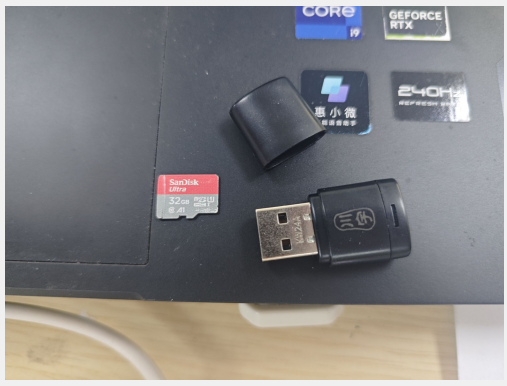
接下来像我这样,把SD卡插入读卡器,记得不要插反了,这个视频电脑会弹出一个对于的磁盘,大小就是你内存卡的大小(待会烧录时候会让选择的)
现在去下载软件,这里给大家附了下载地址:balenaEtcher - Flash OS images to SD cards & USB drives
软件没有什么下载流程直接下载

1.2.开始烧录
首先你需要有系统,就好比修电脑师傅U盘里面的其实也是系统,这里我们称作镜像。
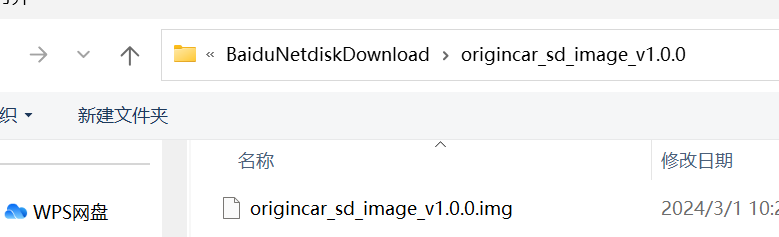
这里大家到地平线给大伙提供的网盘,下载那个origincar_sd_image_v1.0.0.img 因为网盘一直在这里我就不下载完成提供链接了
接下来,打开软件页面,选择从文件烧录

然后你选择完成你刚才下载好的img之后,然后你发现选择目标磁盘按钮就可以点击了
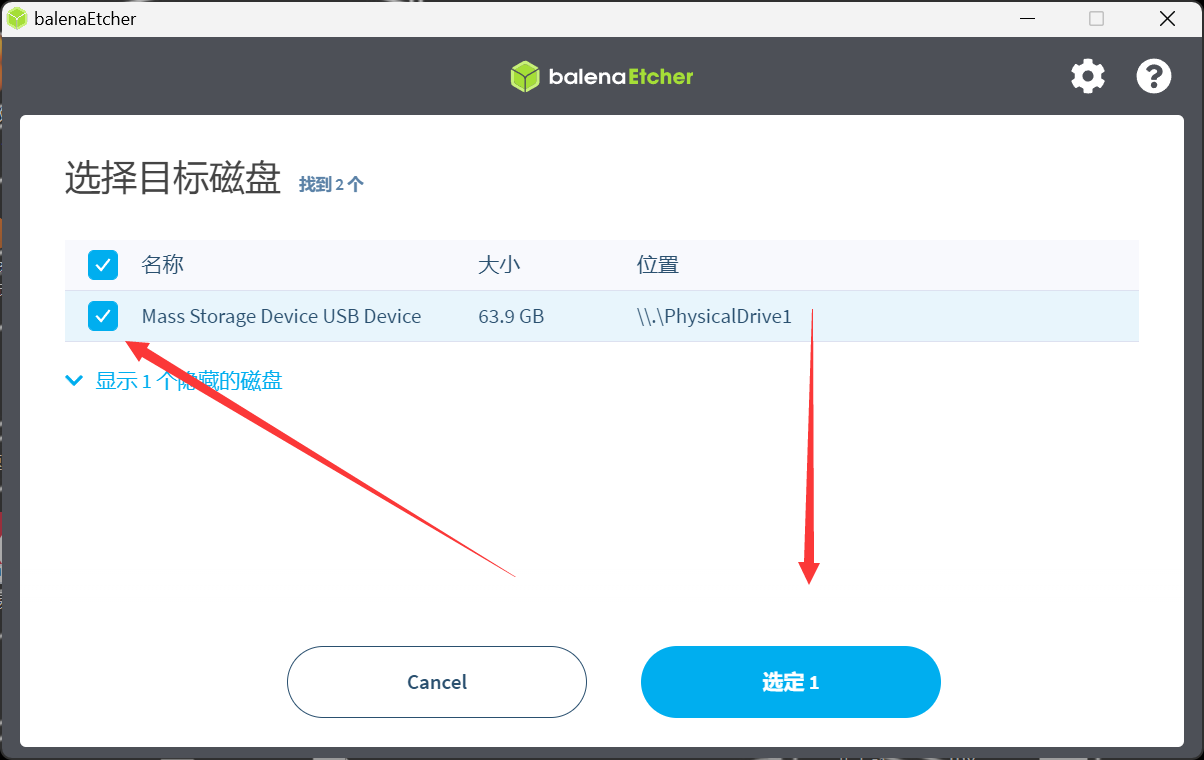
现在你就可以真正的开始,进行烧录。
稍安勿躁,大概要半小时,这里我给大家补充第二个知识
2.知识补充2
当你有系统了,你肯定要想办法操控,很不妙,Server版本,也就是百度网盘里面的没有桌面,这样该咋办呀,那那那,岂不是完蛋,
别怕当然有办法,有一种软件叫做ssh 远程链接软件,这里我推荐 MobaXterm_Personal_23.1
这个软件下载也没啥难度,下载完成安装之后就可以直接使用,这里给大家附上链接:MobaXterm free Xserver and tabbed SSH client for Windows (mobatek.net)
现在,时间应该差不多了吧,当你下载完成这个软件你刚才烧录的镜像应该有反应了
现在大家把自己的SD卡插到,开发板上面
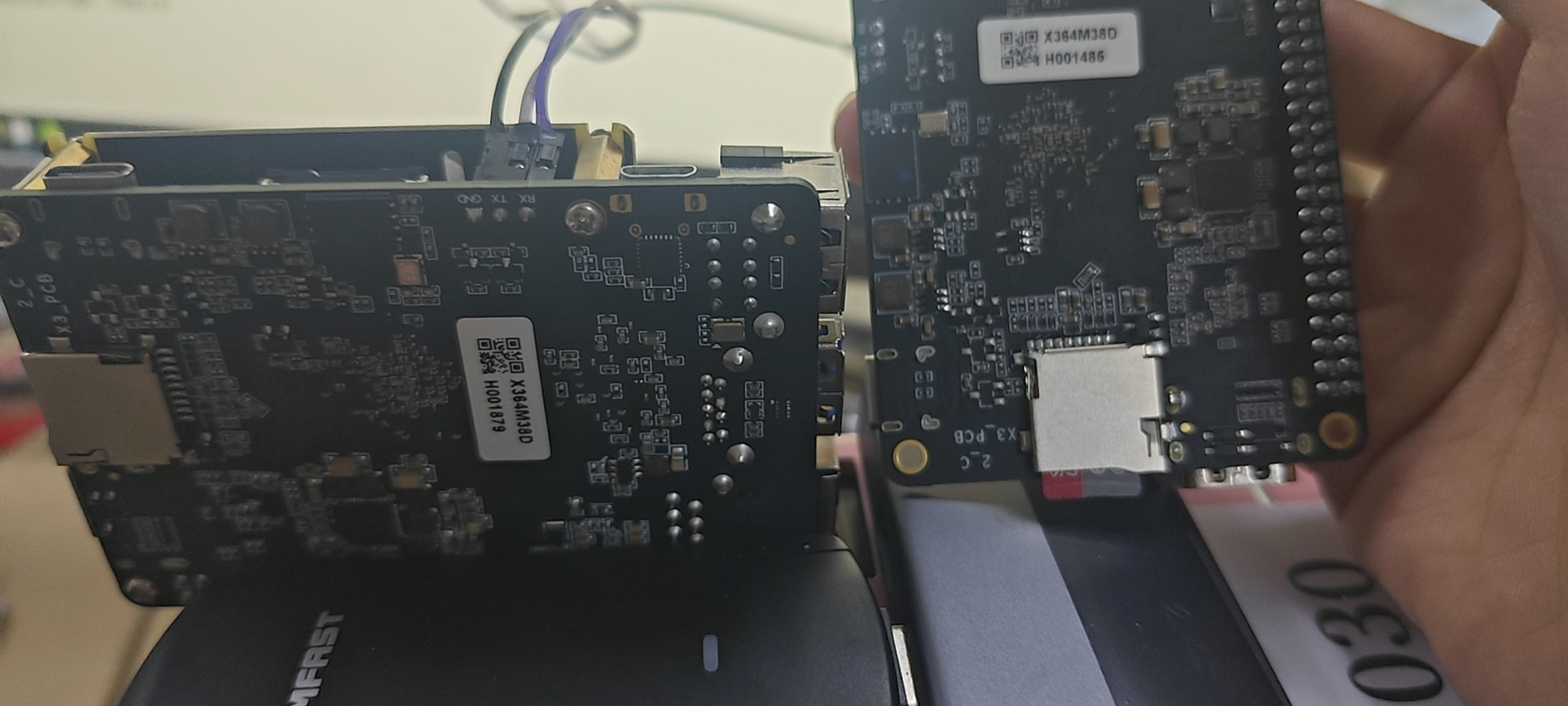
然后拿出几根杜邦线,看到没上面图片,我插了三根线子,左边黑色的是GND 中间TX 右边RX。然后拿出一个USB转TTL,也就是所谓的串口,我记得买的时候官方都是给大家赠送了这些配件。这里我给大家画个效果图吧,因为我的串口丢了,偷偷说下,出去比赛了一趟丢了好多东西,还是我收纳不好,哭死我
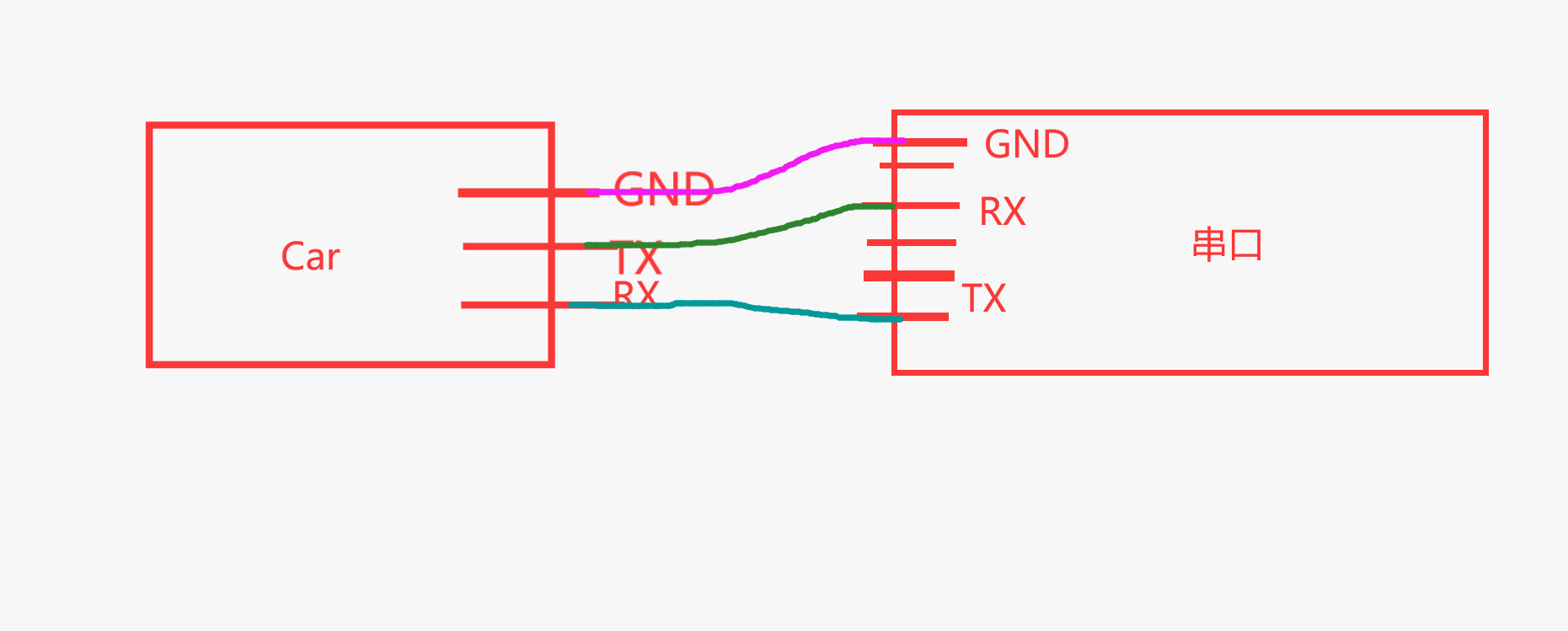
这里强度,再次强调。RX和TX两个一定要交叉连接,不然你会后悔的!!
接下来开始远程链接了正片开始
3.远程链接
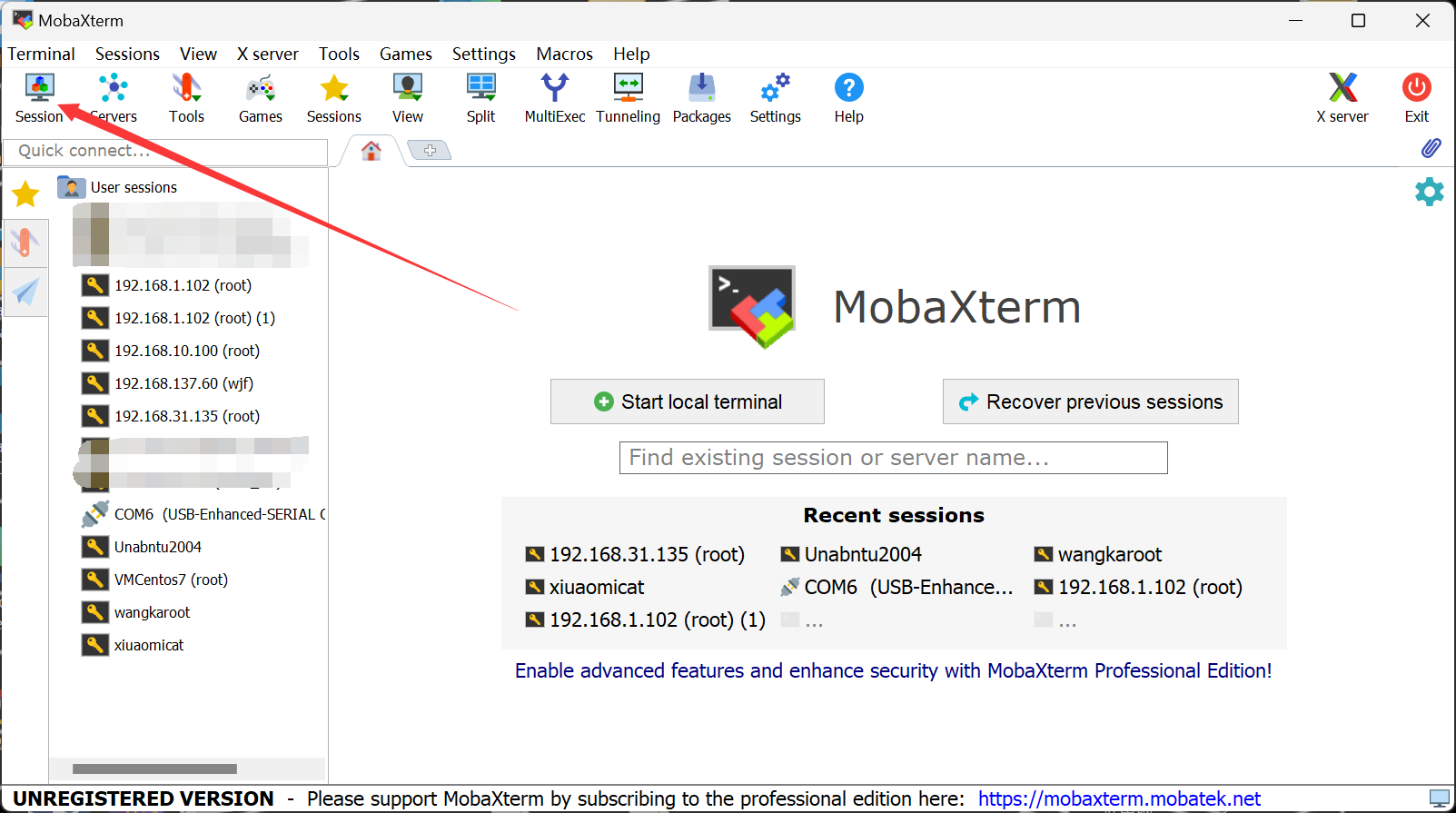
现在,把刚才的连接,一段插在PC电脑,一段保持在车上,打开软件的Session
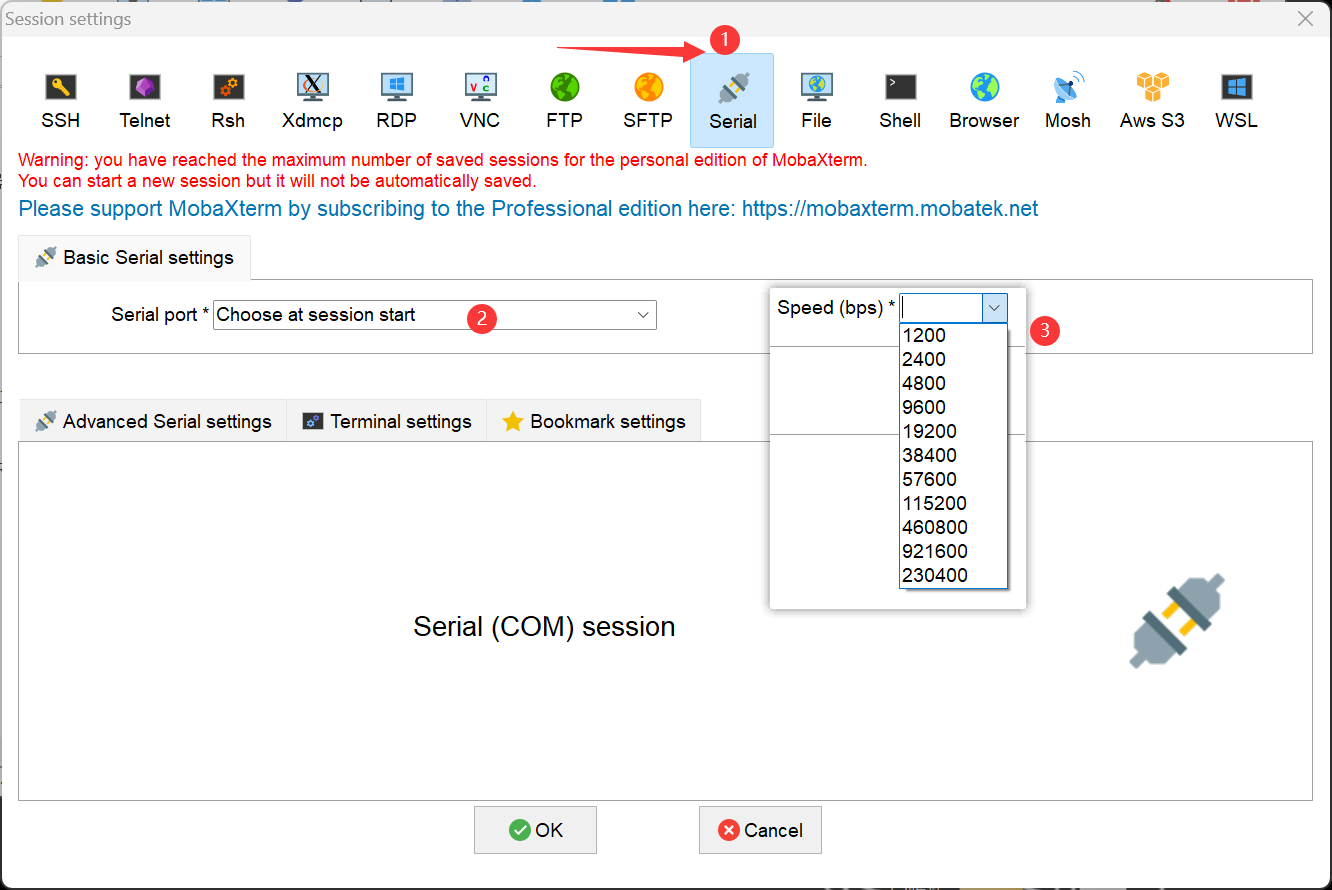
按照下面图片先选择Serial,然后第二部点击Serial port 因为我这里没有串口,丢了哭死,这里会有个COM3也可能是COM6,反正还有个括号里面有个EnhanceUSB啥啥就这个选择这个,

然后第三部点击921600这个Speed,然后保存
此刻你会发现,你的屏幕是黑色的不要紧,不要惊慌正常的
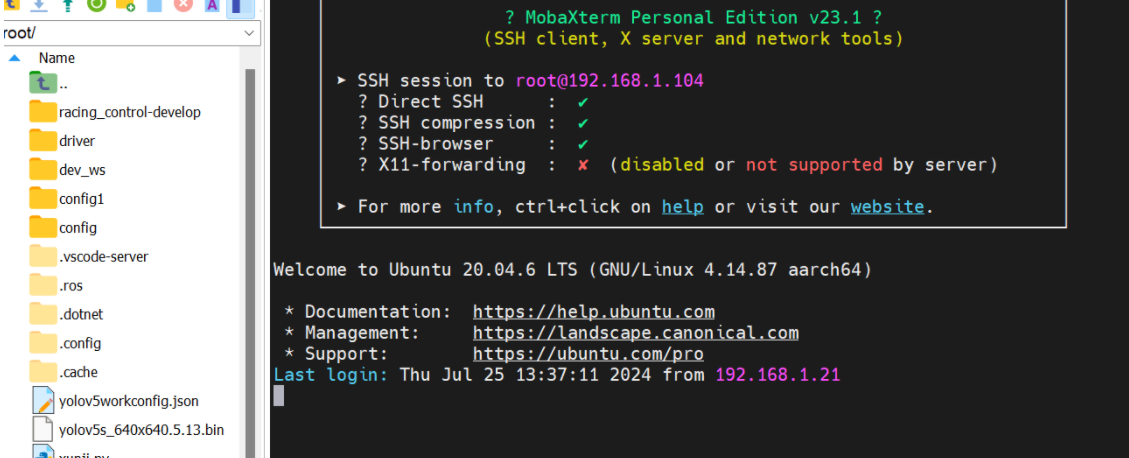
注意注意,这个时候,给你的开发板或者车进行打开电源,你会发现有源源不断的英文字符不断滚动,然后这里我给大家,演示下
你会遇到下面这个图,这个时候你输入root,代表用户名。
然后输入完成回车,要求输入密码,记好了输入密码的时候看不见的,密码也是root,当你输入完成之后,你就会发现哈哈登录进来了

4.有线变无线
我的天刚才真的是干讲解,现在我直接可以过来联网了哈哈。
为什么要无线联网呢?你总不能以后车跑也拽着一根20米的网线跟后面吧哈哈
谢天谢地,终于到这一步了,接下来开始正式联网,一次执行这两行命令
sudo nmcli device wifi list
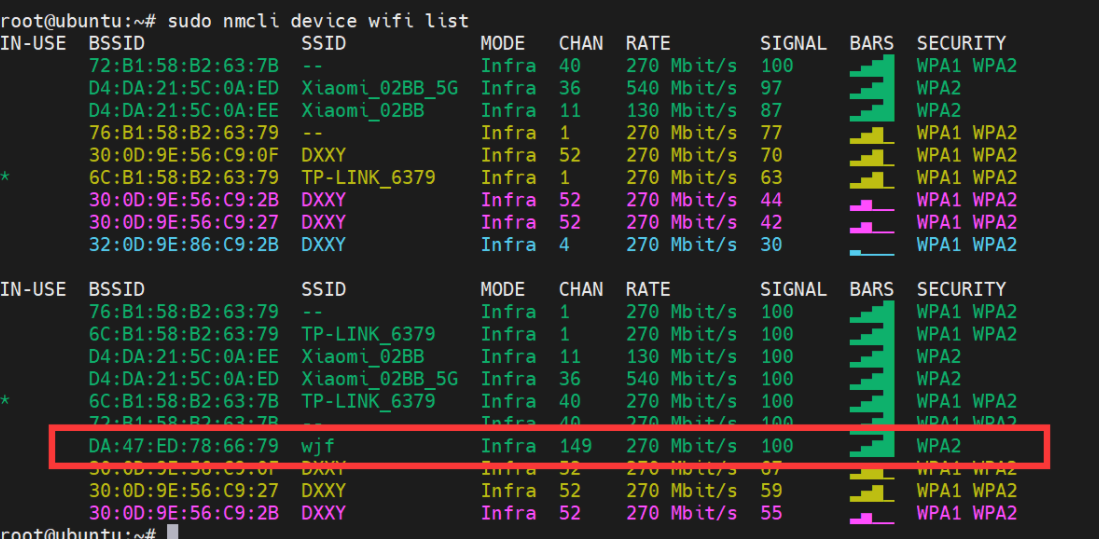
现在找到了我的路由器或者WIFI或者热点的名称了,输入下面进行正式连接
sudo wifi_connect "无线网名称" "无线网密码"
sudo wifi_connect "wjf" "wjf123456"
这里出现了绿色的successfully证明连接成功了(当然我这里是网卡作用,你可以忽律后期再说这个事情,看到绿色的就行)

输入如下命令
ifconfig
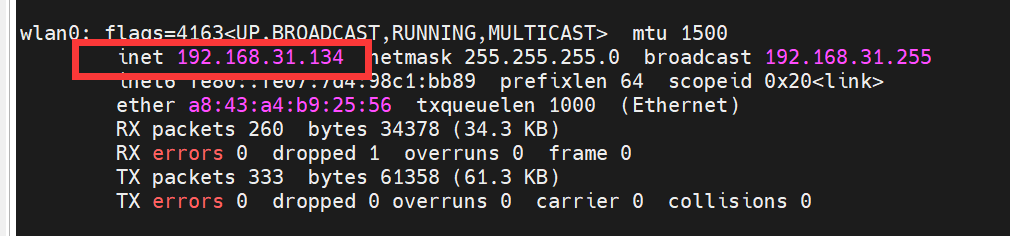
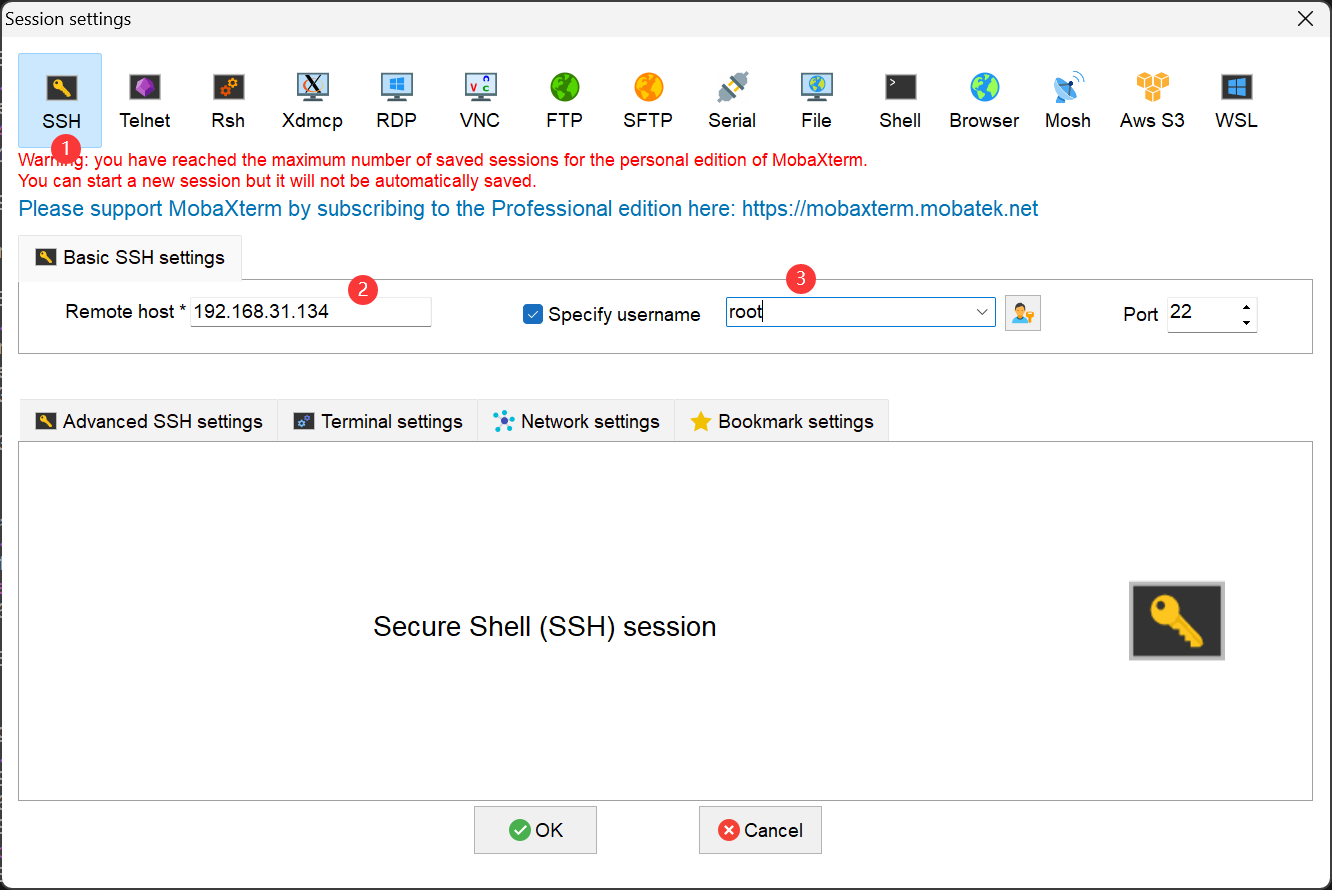
上面就是连接到无线所对应得ip 了,现在你只需要你和小车连接一样的,按照下面三步骤就可以连接了
注意待会输入密码的还是同样看不见,尽管输入就好了
5.真车测试
咱们这里主要还是针对车载必备的几个功能进行测试,比如底盘、WebScoket等
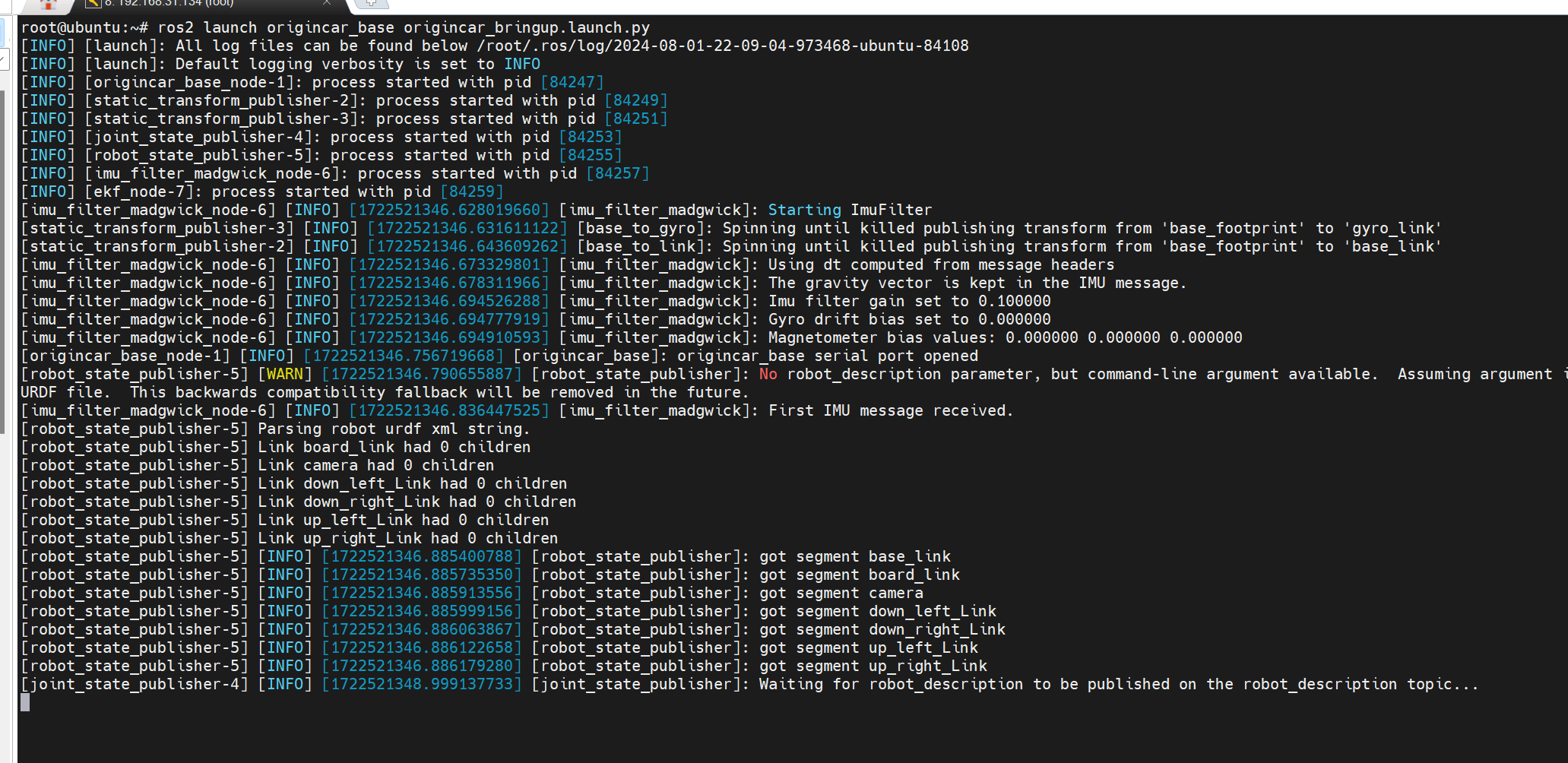
5.1 底盘测试
ros2 launch origincar_base origincar_bringup.launch.py
输入上面命令看到下面输出结果就代表问题不大
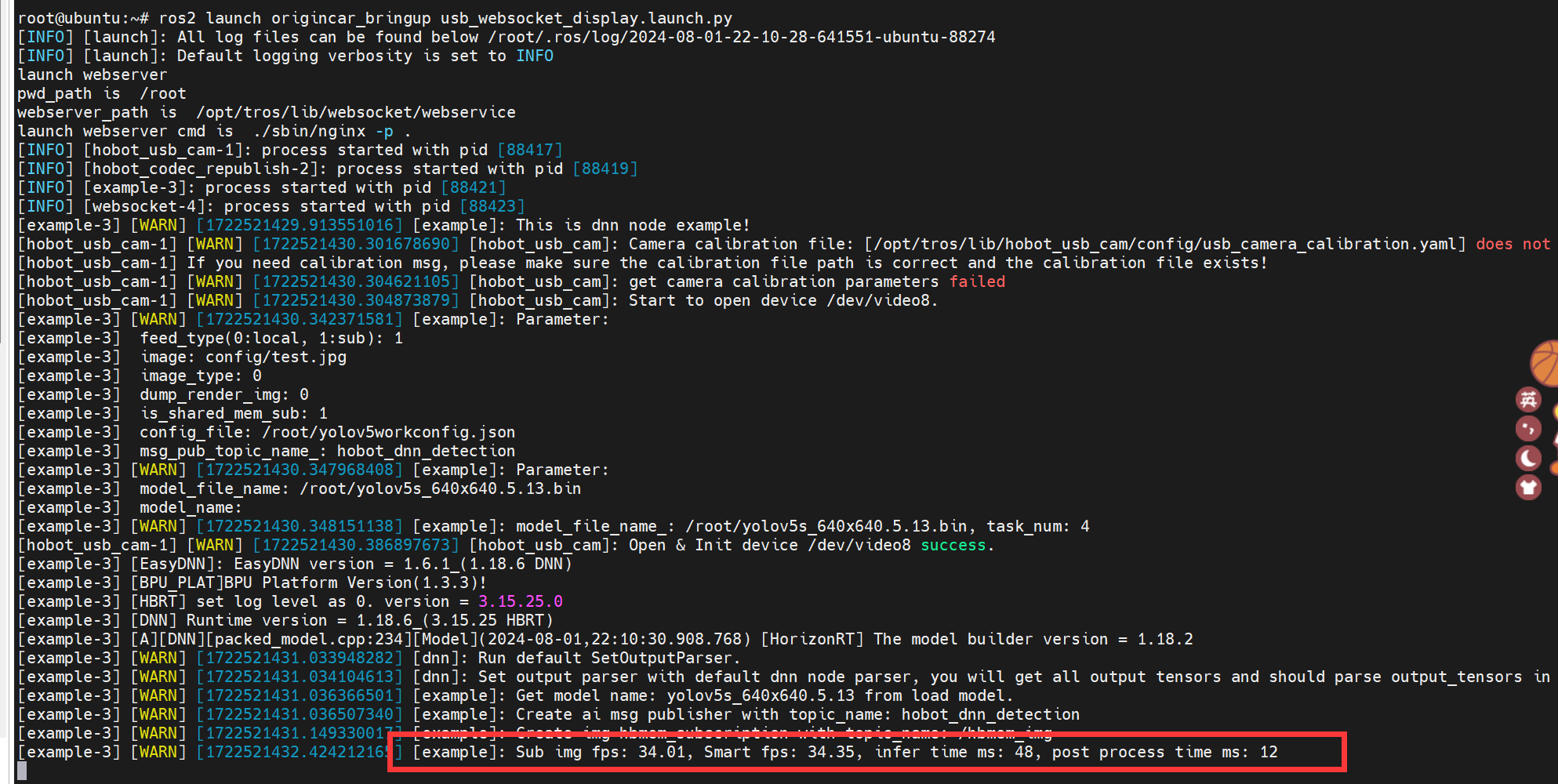
5.2 WebSocket测试
ros2 launch origincar_bringup usb_websocket_display.launch.py
大家输入完成上面命令,可以看到下面推理时间就代表没问题
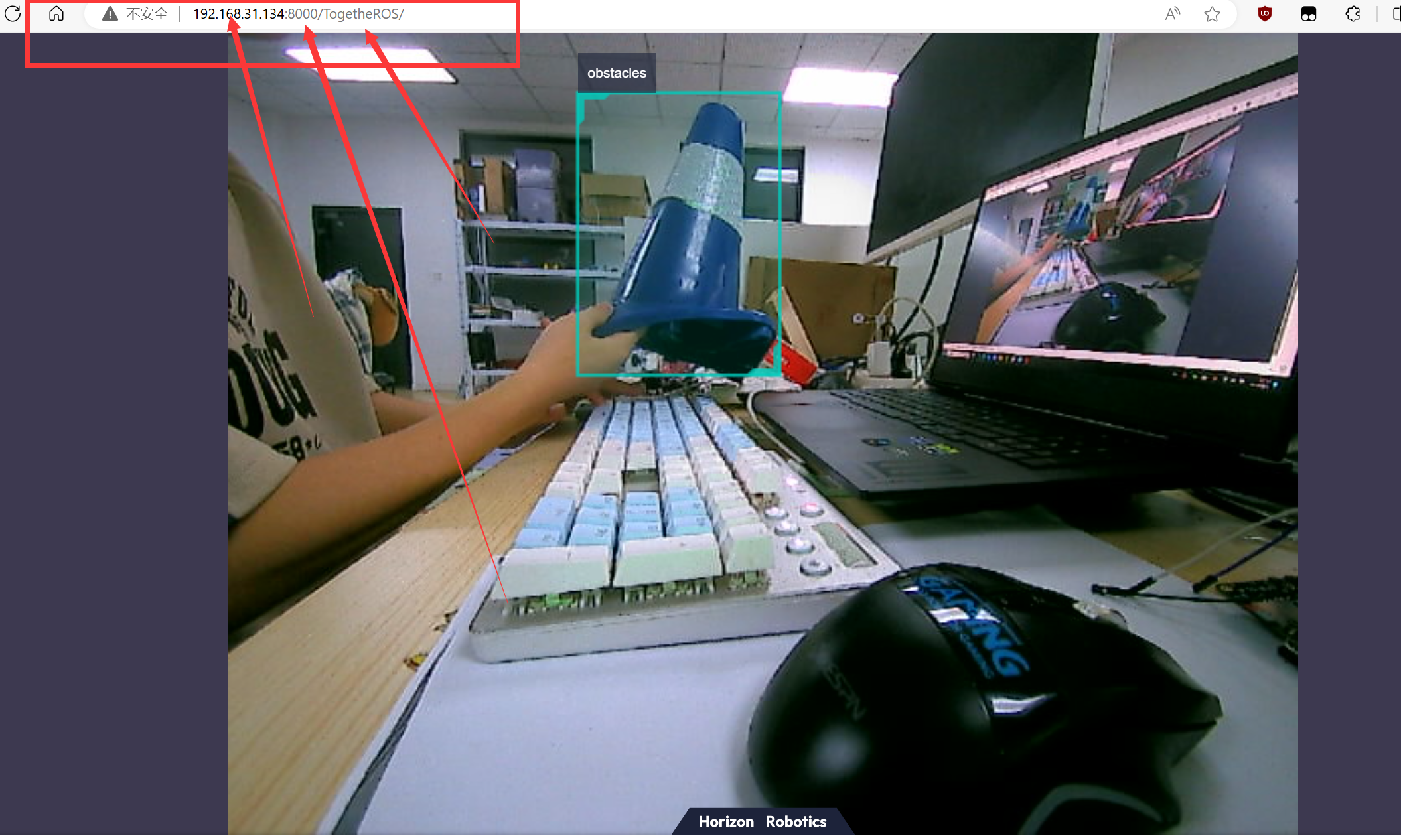
此时在浏览器输入,刚才的ip加8000,还可以看到实时画面(我这里因为我改过配置文件了,所以识别的是锥子,后续给大家进行详细展开)
5.3小车运动控制
5.3.1注意事项
这个地方在测试之前有两个注意点要注意,好多小伙伴没注意会发现,根本动不了
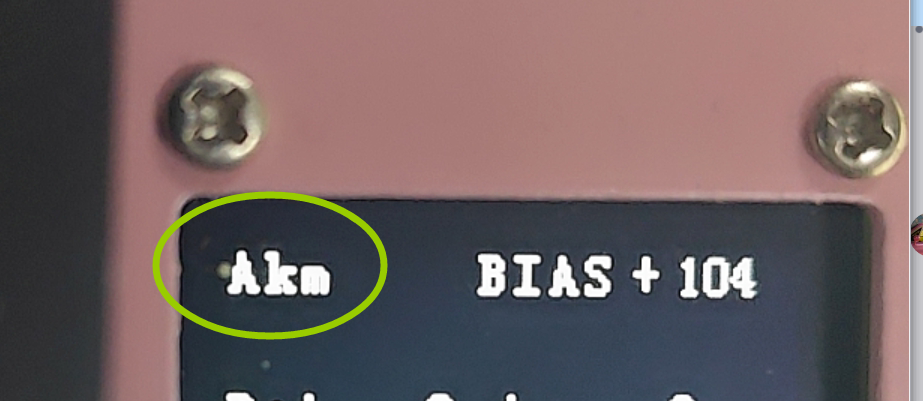
首先第一点,大家看看小车显示屏上面,第一行,确保绿色框里的是akm,如果不是就调节一下32上面的旋钮,由差速模式变为akm
其次第二点就是akm模式(阿克曼模型),需要先给速度,才能打角度,也就是,待会键盘控制节点,要先让车直行动起来,然后才会转弯
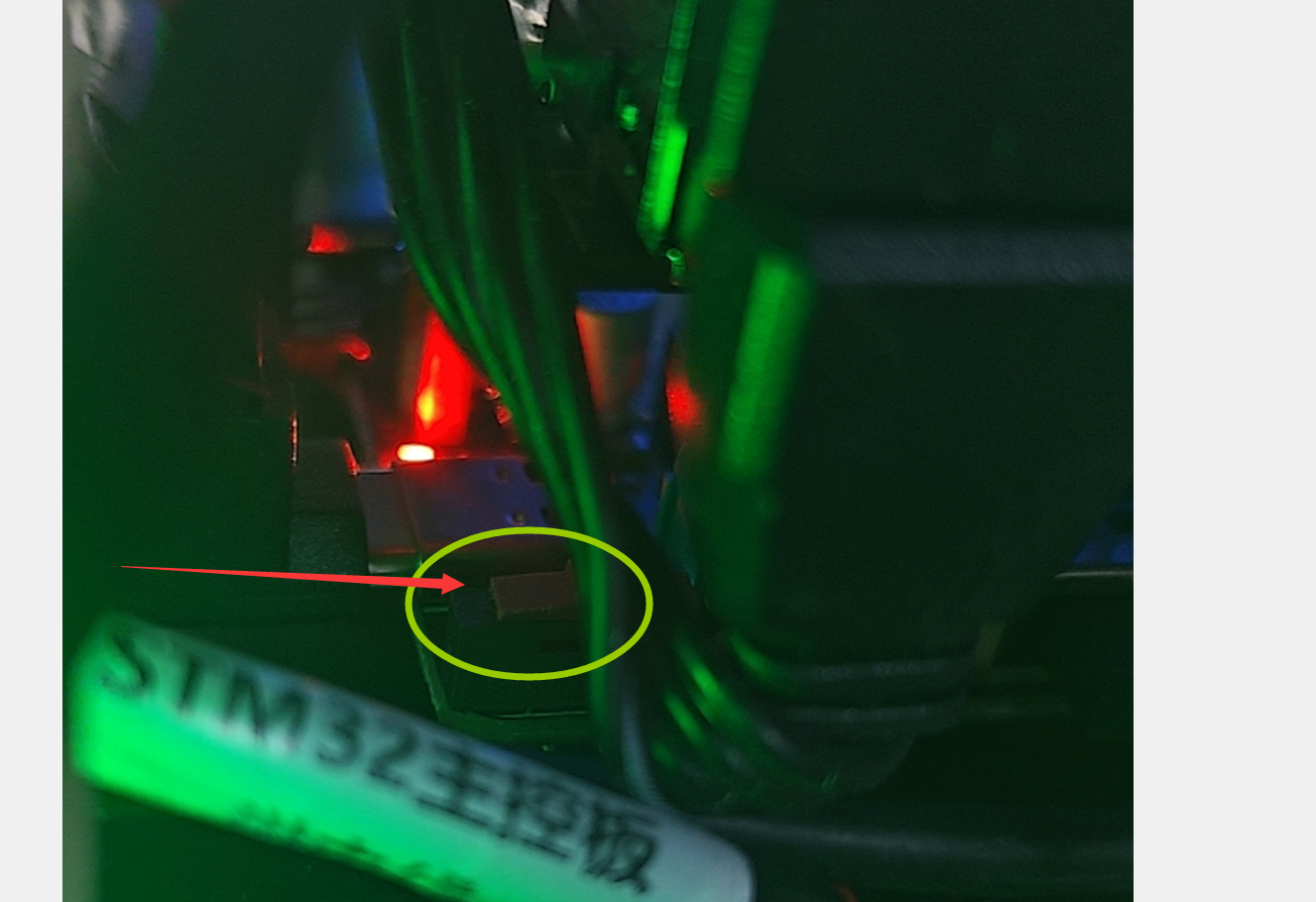
再者最重要的就是,小车上有个红色开关要拨动一下,见下图,不然小车直行也不会动
5.3.2开始测试
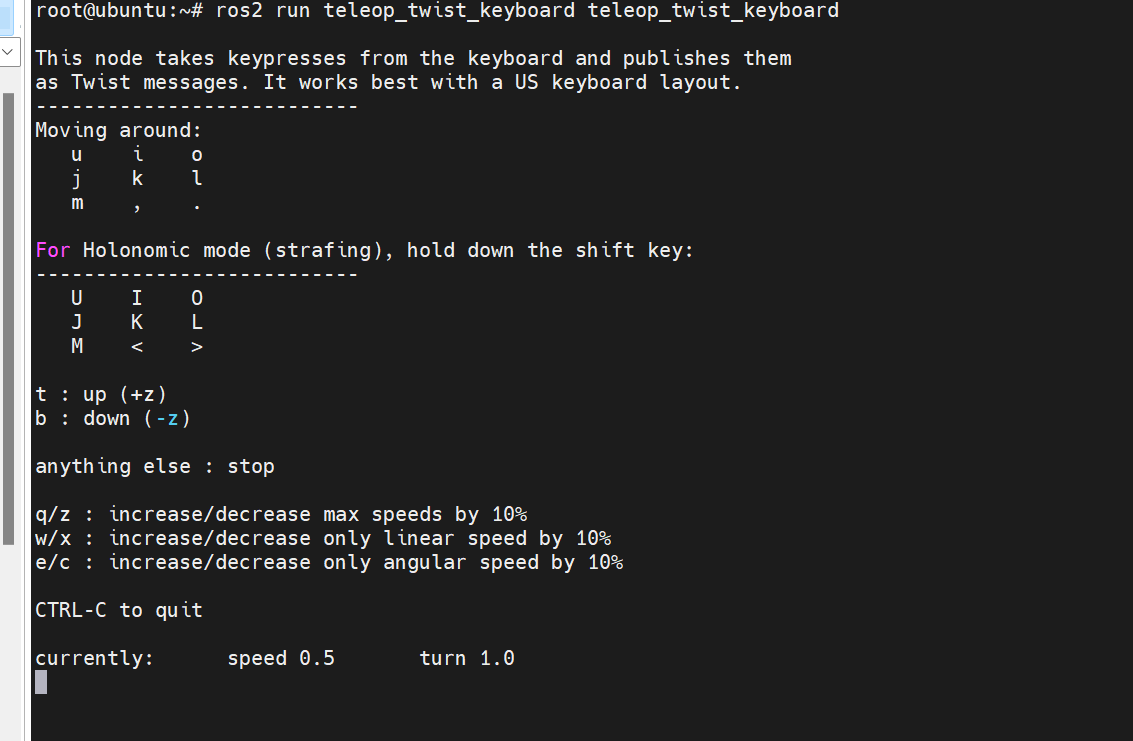
ros2 run teleop_twist_keyboard teleop_twist_keyboard
输入上面命令可以看到小车可以正常运行节点
接下来,按照我的步骤
(1)按下i,你会发现小车直走
(2)按下u,你会发现小车直行并且左转
(3)最后按下k,你会发现小车回正了并且停车了
6.总结与下期预告
到此为止,你的小车已经正常了,你也掌握了初次与小车的交互
新手入门手册还有一些步骤,这些后面我会安排到系列中,给大家
下一期我将从目标识别这块,从Windows到开发板BPU部署,进行保姆级讲解
初次撰写,有哪里不合适不正确,还请各位大佬指出
(2)按下u,你会发现小车直行并且左转
(3)最后按下k,你会发现小车回正了并且停车了
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









