






 智能驾驶
智能驾驶
一、行业速览
智能驾驶是指通过装载先进的传感器等智能设备,并融合现代传感技术、信息与通信技术、人工智能等前沿科技,构建了一套具备复杂环境感知、决策规划和控制执行能力的系统。这套系统在一定程度上能够替代或完全取代人类驾驶员的工作。
根据汽车控制权的分配以及安全责任的界定,智能驾驶可以划分为不同的级别。目前,国际自动机工程师学会(SAE-International)和高速公路安全管理局(NHTSA)是智能驾驶分级标准的两大权威机构。特别是国际自动机工程师学会制定的SAE J3016标准,在全球范围内具有广泛的影响力和应用范围。该标准详细地将汽车驾驶自动化分为6个等级,从L0级(无自动化)到L5级(全自动化)。随着级别的提升,车辆的自动化程度也相应提高,这意味着在车辆行驶过程中,对驾驶员的介入需求会逐渐减少。
二、等级分类
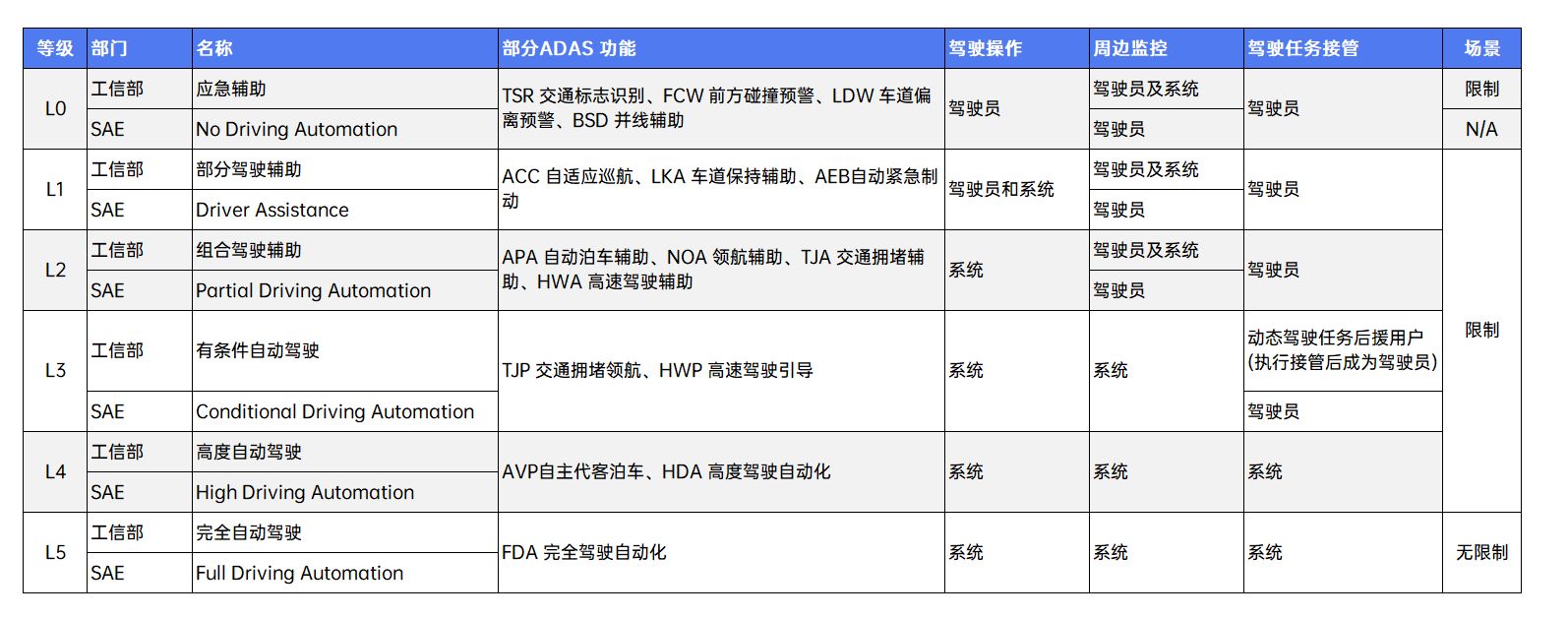
根据 SAE J3016 和中国的分级标准,智能驾驶被细分为六个等级:L0 的应急辅助、L1 的部分驾驶辅助、L2 的组合驾驶辅助、L3 的有条件自动驾驶、L4 的高度自动驾驶,以及 L5 的完全自动驾驶。在这些等级中,L1 和 L2 被认为是辅助驾驶,而 L3 至 L5 则属于自动驾驶的范畴。值得注意的是,L3 是一个过渡阶段,在这个阶段,驾驶过程中仍需要人类和机器的共同参与。目前,包括国际知名车企如 BBA,以及国内主流车企如华为、小鹏等在内的众多汽车制造商已经掌握了 L3 级别的自动驾驶技术。然而,L3 级别的自动驾驶在实际道路上仍然面临许多挑战。现阶段,行业中真正得到广泛应用的是接近 L2 级别的 ADAS(高级驾驶辅助系统)功能,例如 APA(自动泊车辅助)和 NOA(领航辅助驾驶)等。
智能驾驶技术路线主要分为纯视觉感知和多传感器融合感知两种。在纯视觉感知路线中,摄像头是主要的感知设备,配合毫米波雷达等低成本传感器,依赖自主研发的芯片和算法,并通过优化视觉系统的AI算法,达到较高的自动驾驶水平。特斯拉的FSD和百度的Apollo lite是纯视觉方案的典型代表。而多传感器融合感知路线则以激光雷达为主导,结合摄像头、毫米波雷达、超声波雷达等多种传感器。目前,多传感器融合路线是主流方案,参与者包括传统车厂、新势力和电装等传统公司。
三、技术解析
BEV+Transformer已经成为智能驾驶算法的主流趋势。
- 强大的感知能力:BEV通过将360度环视的时间和空间信息融合,为自动驾驶系统提供了全面且准确的感知能力。结合Transformer架构,系统能够识别静态的车道线、红绿灯、道路边缘信息,以及动态的行人、车辆等。这种强大的感知能力是实现高级别自动驾驶的关键。
- 高效的决策和规划:基于BEV+Transformer的算法能够结合时序帧对周围车辆进行未来3-6秒的轨迹预测。这使得自动驾驶系统能够提前做出决策和规划,提高行驶的安全性和效率。
- 逐步替代手写规则:随着Transformer模型的规模不断扩大,参数越来越多,准确率也越来越高。这意味着BEV+Transformer有潜力逐步替代传统的手写规则识别方法,进一步推动自动驾驶技术的发展。
- 端到端的算法闭环:BEV+Transformer的流行也得益于端到端算法的发展。端到端算法能够实现从感知到决策的完整闭环,提高系统的整体性能和鲁棒性。而BEV+Transformer正是实现端到端算法的理想选择。
在特斯拉率先采用BEV+Tranformer大模型下,相比传统的2D+CNN小模型,大模型的主要优势在于:提高感知能力,通过多模态数据融合消除遮挡和重叠问题,提高检测和跟踪精度;提高泛化能力,通过注意力机制寻找内在关系,使智能驾驶学会总结归纳。主流车企及自动驾驶企业已广泛布局BEV+Transformer,大模型成为自动驾驶算法的主流趋势。
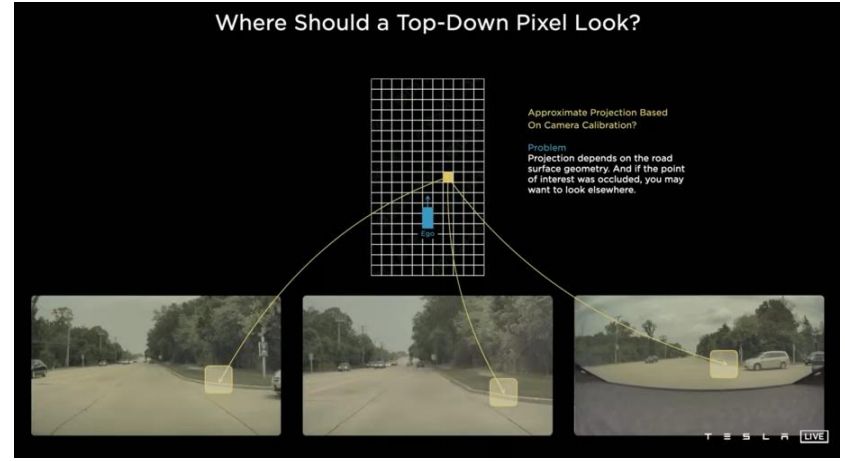 image-20240105234447753
image-20240105234447753
BEV和Transformer分别是什么?
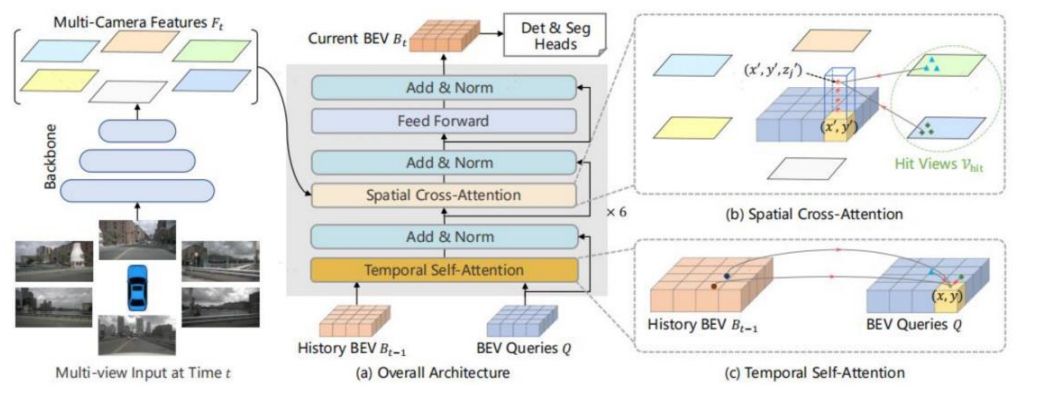
BEV,全称为Bird’s Eye View(鸟瞰视角),是一种将三维环境信息投影到二维平面的方法,通过俯视视角展示环境中的物体和地形。而Transformer大模型则是一种基于自注意力机制的深度学习模型。与传统的神经网络RNN和CNN不同,Transformer不会按照串行顺序处理数据,而是通过注意力机制挖掘序列中不同元素的联系及相关性。这使得Transformer能够适应不同长度和不同结构的输入,从而提高了模型在处理序列数据上的能力。
与传统小模型相比,BEV+Transformer的优势在于其能显著增强智能驾驶的感知能力和泛化能力,从而有助于解决智能驾驶中的长尾问题。具体而言,BEV+Transformer的优势体现在以下两个方面:
- 感知能力提升:通过BEV(Bird's Eye View,鸟瞰视图)的统一视角,BEV+Transformer能够将激光雷达、雷达和相机等多模态数据融合至同一平面上。这样做的好处是能为智能驾驶提供全局视角,同时消除不同数据之间的遮挡和重叠问题,进而提高物体检测和跟踪的精度。
- 泛化能力提升:Transformer模型通过自注意力机制实现全局理解的特征提取,有助于挖掘事物之间的内在联系。这使得智能驾驶系统能够学会总结归纳驾驶经验,而非仅仅进行机械式学习。因此,BEV+Transformer在提高智能驾驶的泛化能力方面具有显著优势。

“强调感知,降低地图依赖”已成趋势。
在BEV+Transformer架构下,这一趋势更加明显。BEV能够将摄像头捕获的2D图像转化为3D信息,显著提升了纯视觉方案的效果,使得感知层的视觉产业链首先受益。具体来说,每辆车预计将增加4-6颗摄像头,以及6-8颗串行芯片和2-3颗解串行芯片。从摄像头的规格来看,普通摄像头正在向更高像素、更远感知距离的ADAS摄像头升级,这一趋势非常明显。
四、行业定义
智能汽车的发展正在自下而上地重新定义汽车行业。
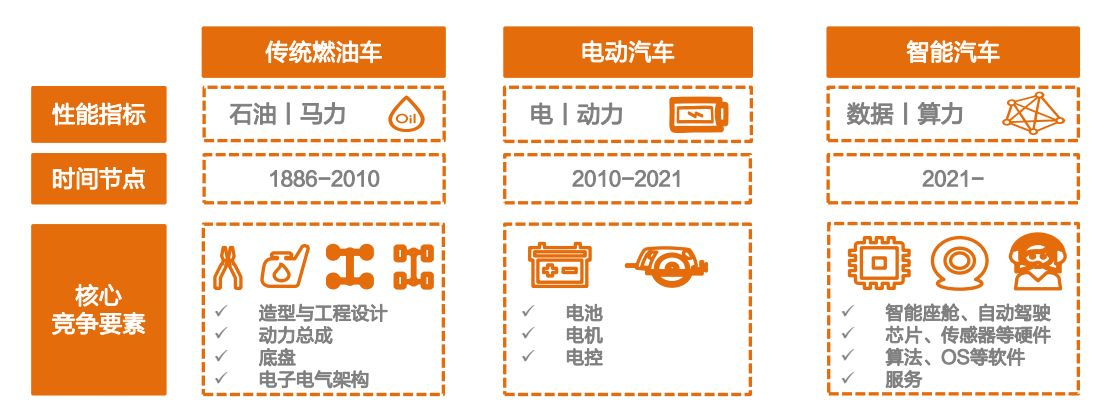
过去,汽车的性能主要由内燃机的马力来衡量,而现在随着电动化和智能化的发展,汽车的性能指标已经发生了根本性的变化。
在电动汽车时代,动力电池的续航能力成为了衡量汽车性能的重要指标。同时,随着智能汽车时代的到来,算力已经成为影响汽车性能的核心要素。这是因为智能汽车需要大量的数据处理和决策能力,而这些都需要强大的算力支持。
随着智能汽车的发展,汽车的核心竞争力也在发生转移。过去,汽车的核心竞争力主要来自于发动机和底盘等传统机械部件的性能。而现在,随着自动驾驶和智能座舱等技术的发展,汽车的核心竞争力已经扩展到了传感器、芯片等硬件以及算法、操作系统等软件领域。
这种核心竞争力的转移也带来了汽车产业链的重塑。过去,汽车产业链主要围绕发动机、底盘等传统机械部件展开。而现在,随着智能汽车的发展,传感器、芯片等硬件以及算法、操作系统等软件在产业链中的地位日益重要。同时,随着智能化升级的不断推进,汽车线束长度不断增加,这也对汽车的设计和制造提出了更高的要求。
因此,可以说智能汽车的发展正在自下而上地重新定义汽车行业。从性能指标到核心竞争力再到产业链结构,汽车行业正在经历一场深刻的变革。对于汽车制造商来说,要适应这种变革并抓住机遇,就需要不断创新并拥抱新技术和新模式。
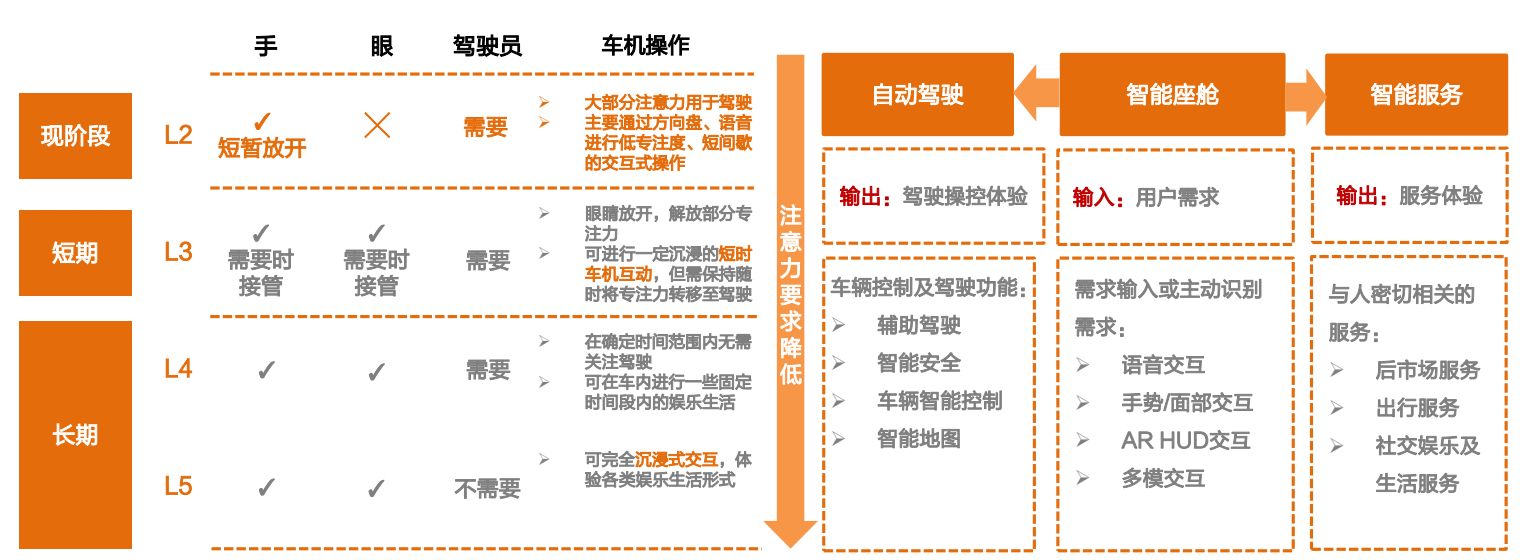
智能座舱和智能驾驶成为汽车智能化的关键点:
智能座舱作为智能驾驶和智能服务的入口,在交互环节实现了双手的解放。它能够接收并识别用户的需求,主动提供智能化的服务。
智能驾驶在驾驶环节实现了对注意力的解放,这不仅影响了用户在车内的功能需求,还改变了汽车的产品形态。它是智能汽车产品实现质变的核心要素。
当智能座舱和自动驾驶完全解放了双手和注意力后,汽车的中心将从车本身转移到人,真正成为人的“第三生活空间”。
政策、技术和商业正在推动汽车智能化进入一个时代。
- 政策:各国政府都在积极推动新能源汽车和智能化交通的发展。例如,中国政府就提出了一系列政策,包括购车补贴、免征购置税等,以鼓励消费者购买和使用新能源汽车。此外, 政府还大力支持自动驾驶技术的研发和应用,为相关企业提供税收优惠、资金扶持等政策支持。
- 技术:随着人工智能、大数据、云计算等技术的不断发展,汽车智能化水平不断提高。例如,智能驾驶技术已经实现了从部分智能驾驶到完全自动驾驶的跨越,智能座舱也实现了从简单的信息娱乐系统到全方位智能服务的升级。这些技术的进步为汽车智能化提供了强大的技术支持。
- 商业:汽车智能化已经成为汽车产业链的重要组成部分,各大车企都在积极布局智能化领域。
政策、技术和商业三方的共振正在推动汽车智能化进入一个高速增长期。未来,随着技术的不断进步和政策的不断完善,汽车智能化的发展前景将更加广阔。















 932
932











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









