






风机变桨控制基于FAST与MATLAB SIMULINK联合仿真模型非线性风力发电机的
PID独立变桨和统一变桨控制下仿真模型,对于5WM非线性风机风机进行控制
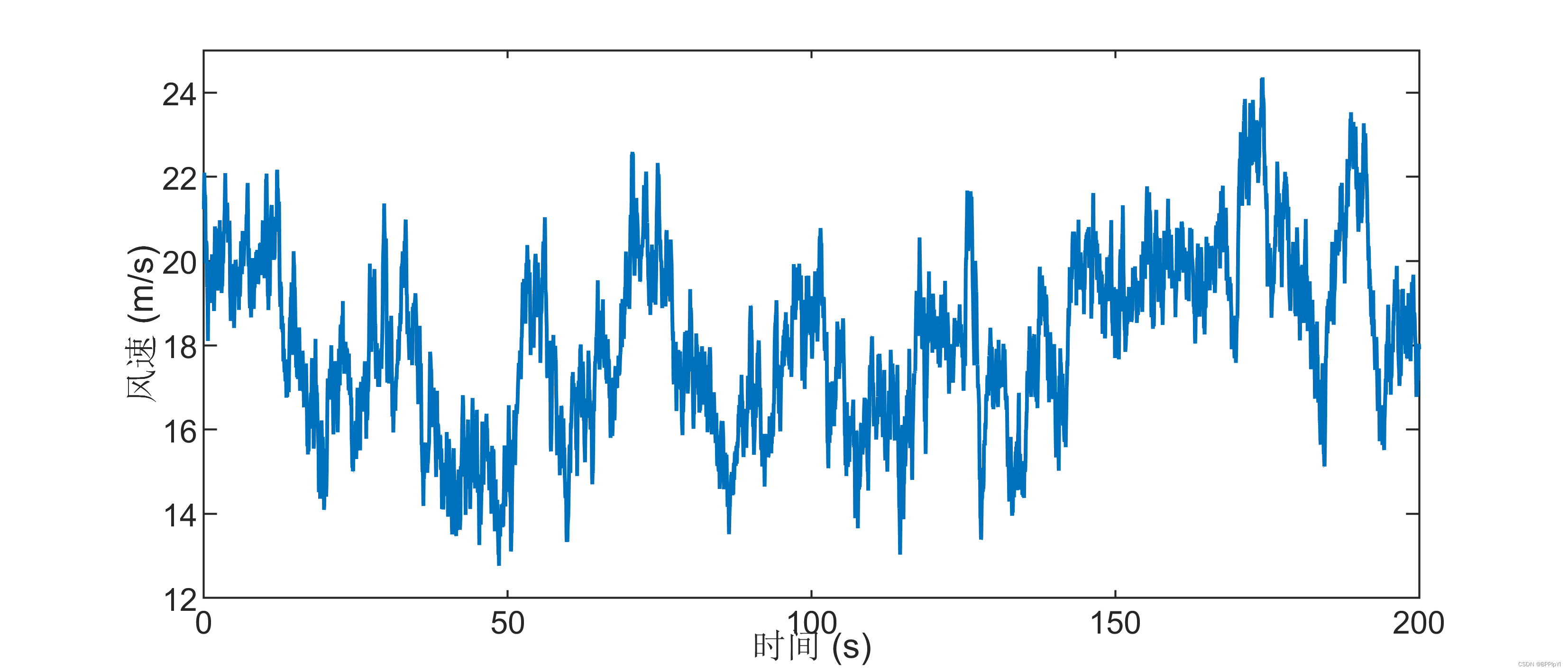
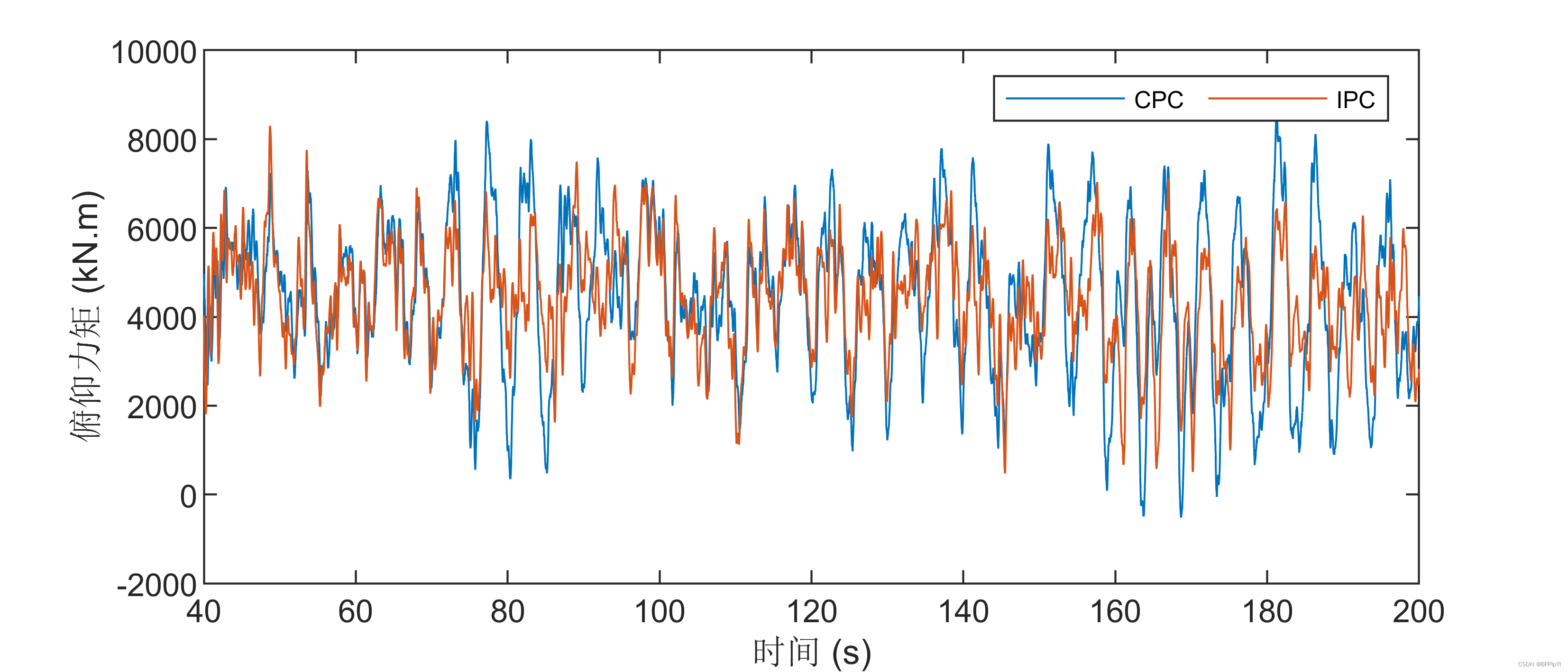
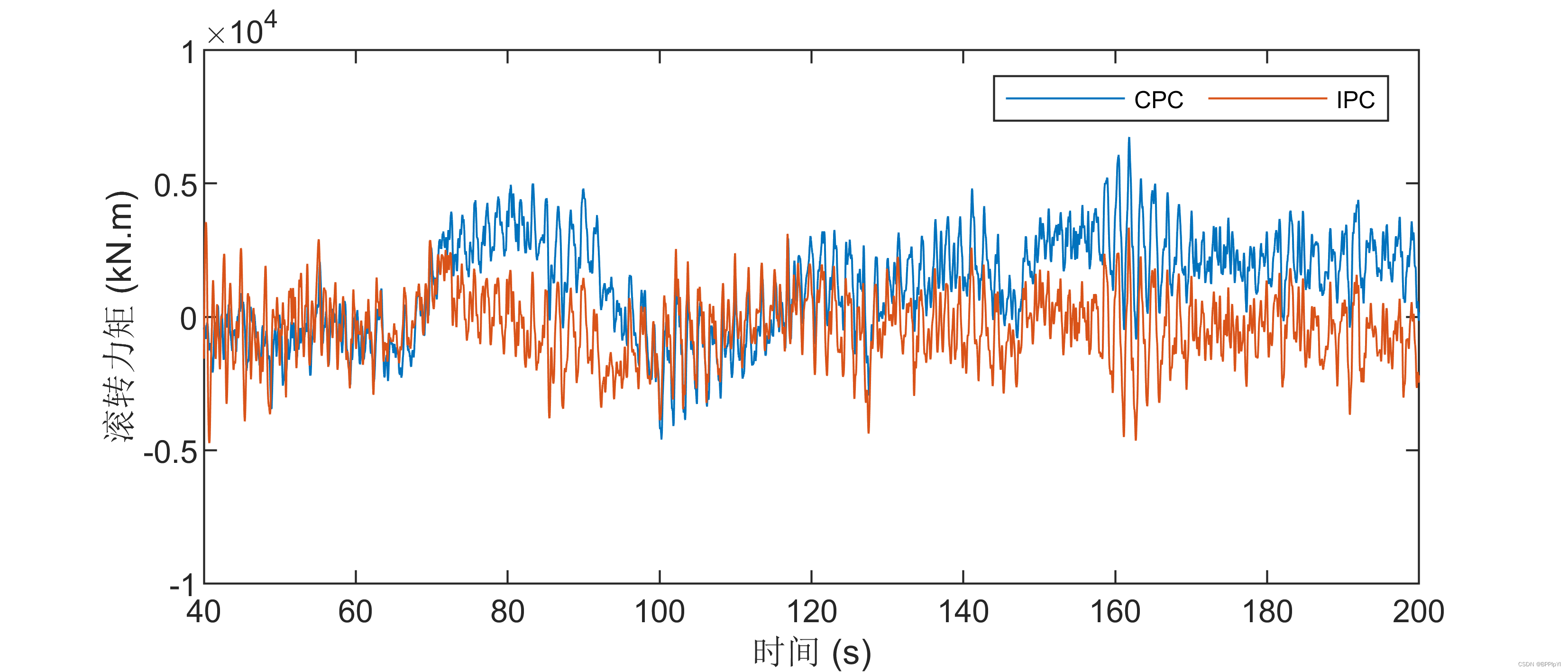
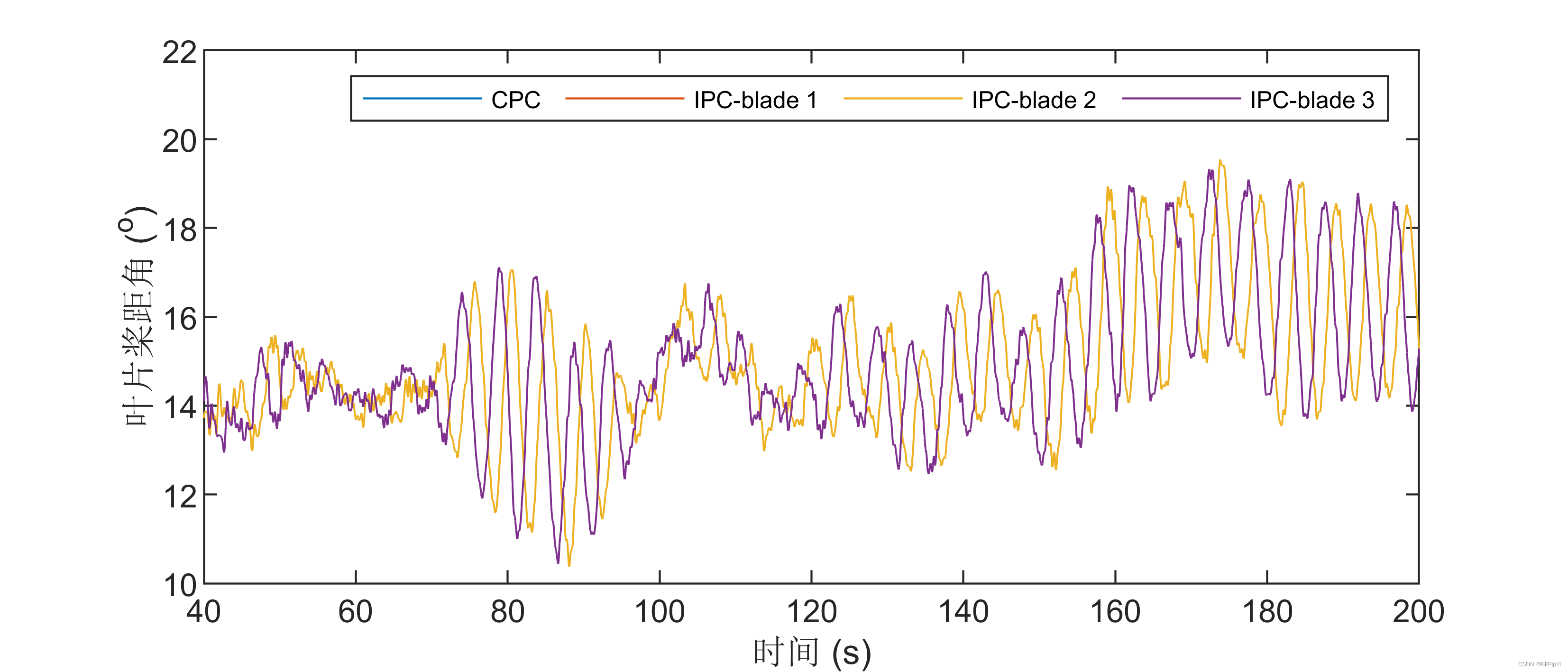
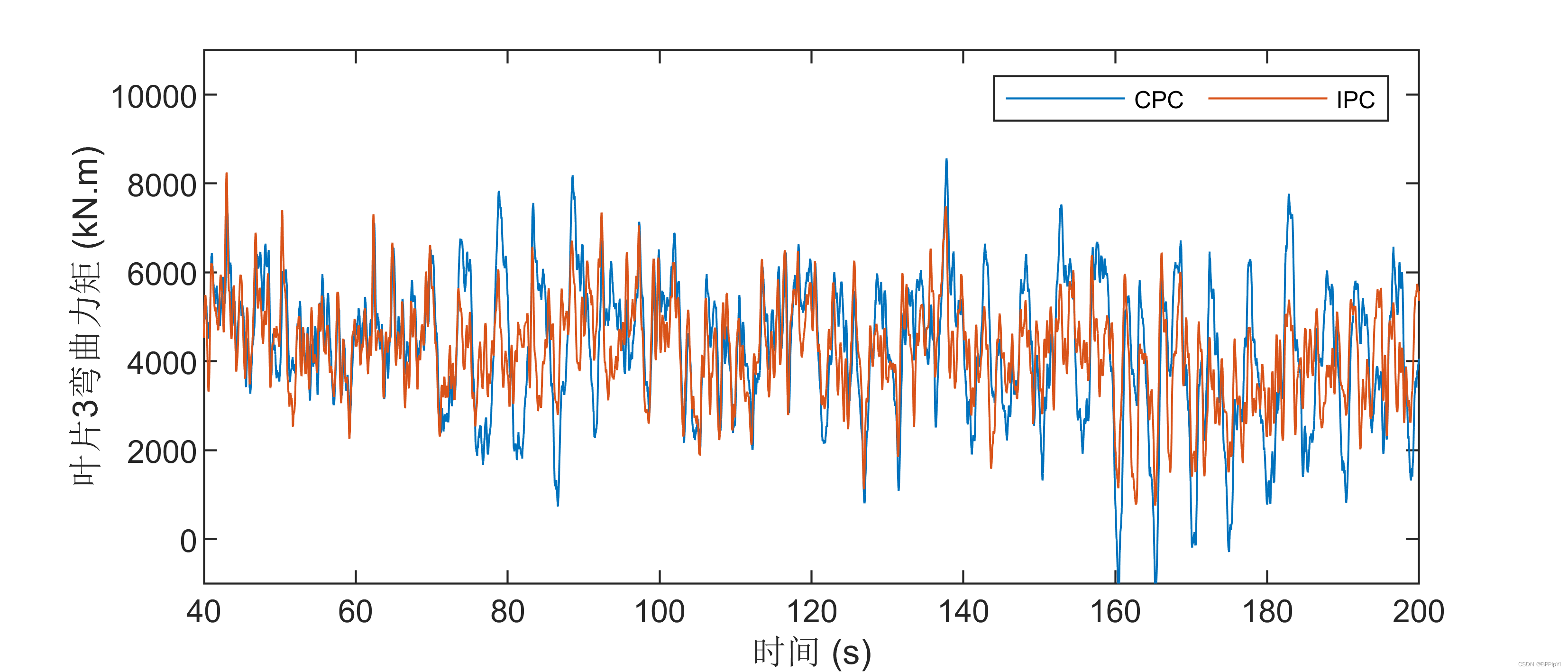
链接simulink的scope出转速对比,桨距角对比,叶片挥舞力矩,轮毂处偏航力矩,俯仰力矩等载荷数据对比图,在trubsim生成的3D湍流风环境下模拟
统一变桨反馈信号是转速,独立变桨反馈是叶根载荷
包含openfast与matlab simulink联合仿真的建模
NREL免费提供的5MW风机参数建模
可以提供参考文献

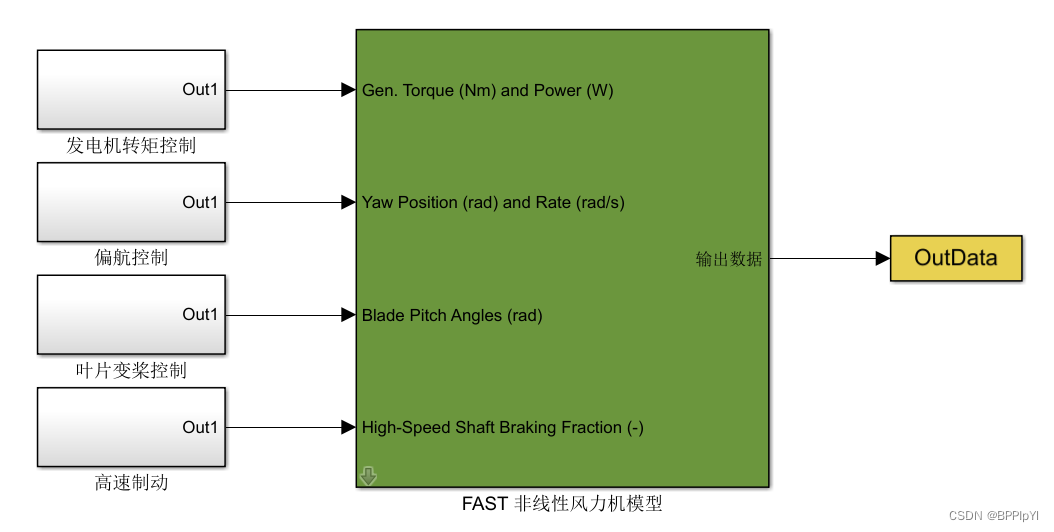
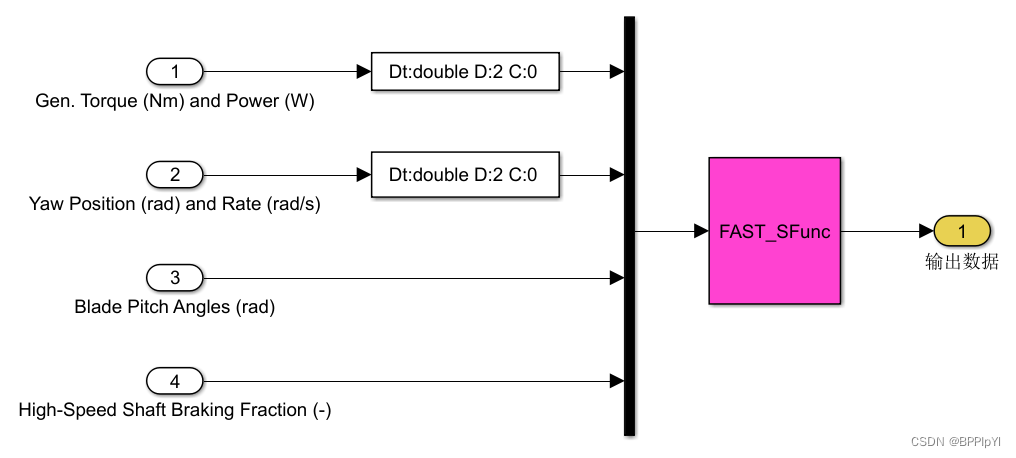

在风力发电系统中,风机变桨控制是一个至关重要的环节。变桨控制可以实现对风机叶片的角度控制以及风机的转速控制,从而实现风机的更高能量利用率和更好的稳定性。在此背景下,本文基于FAST与MATLAB SIMULINK联合仿真模型,对非线性风力发电机的PID独立变桨和统一变桨控制进行了仿真研究。
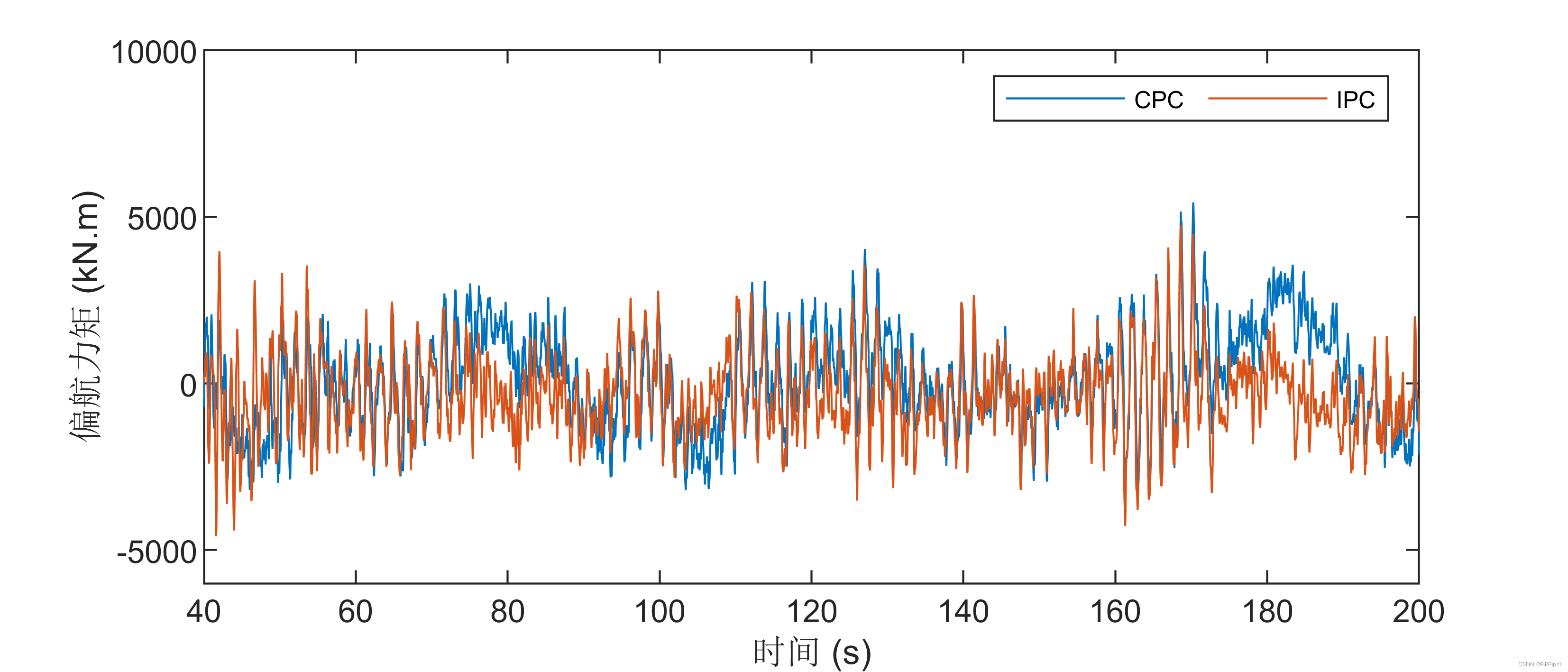
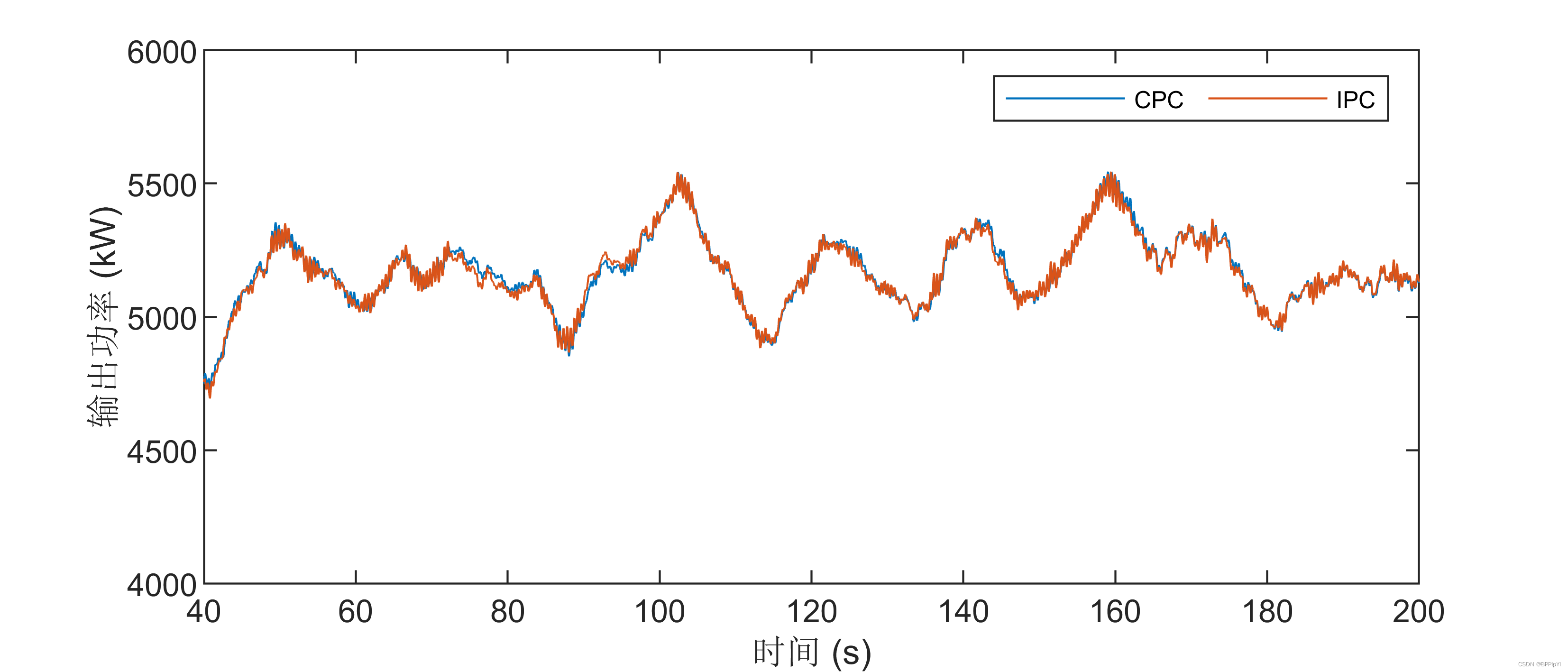
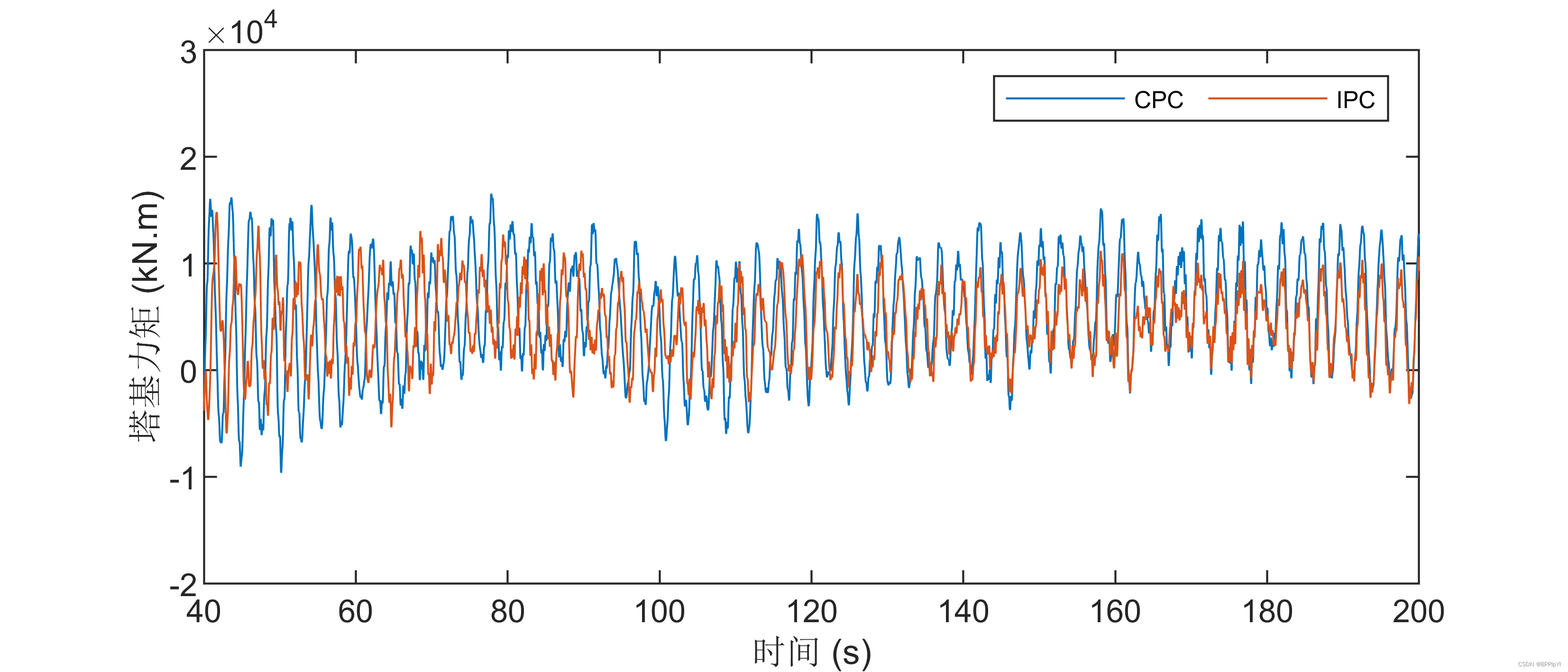
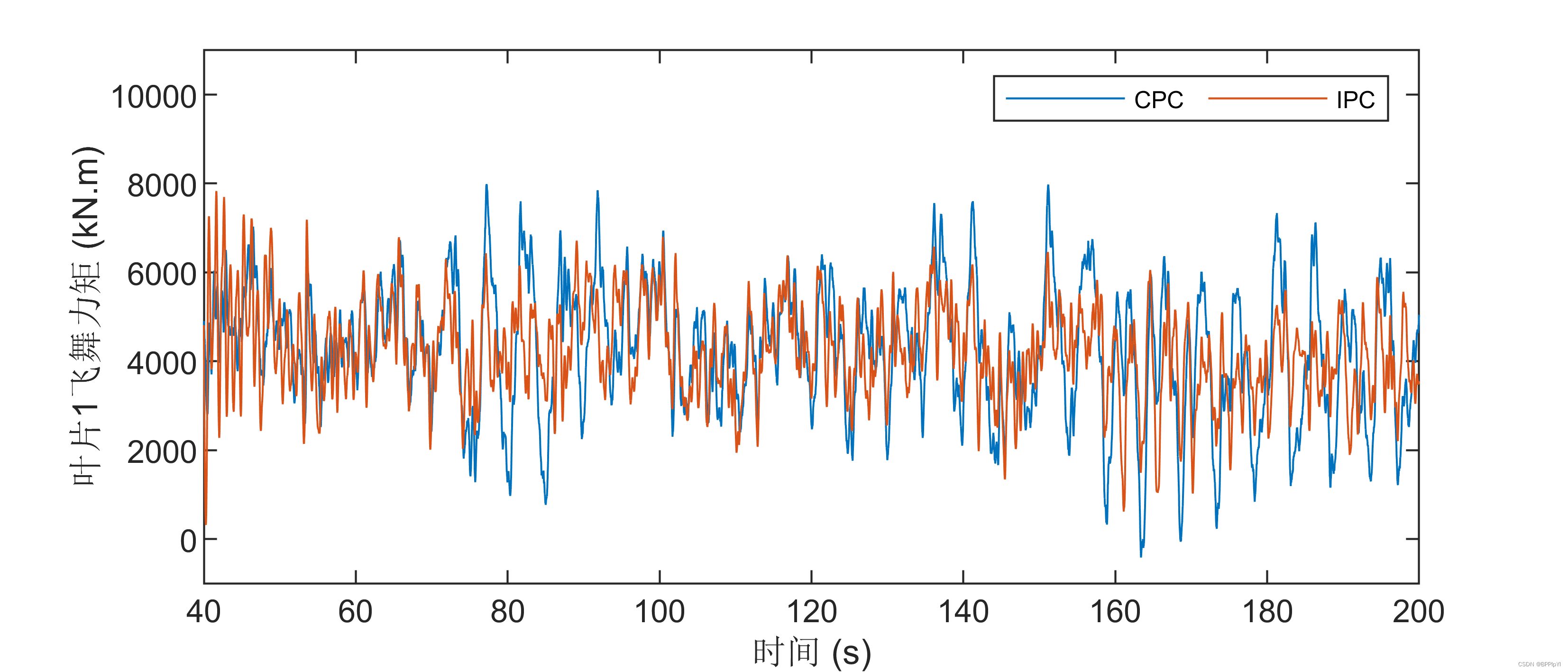
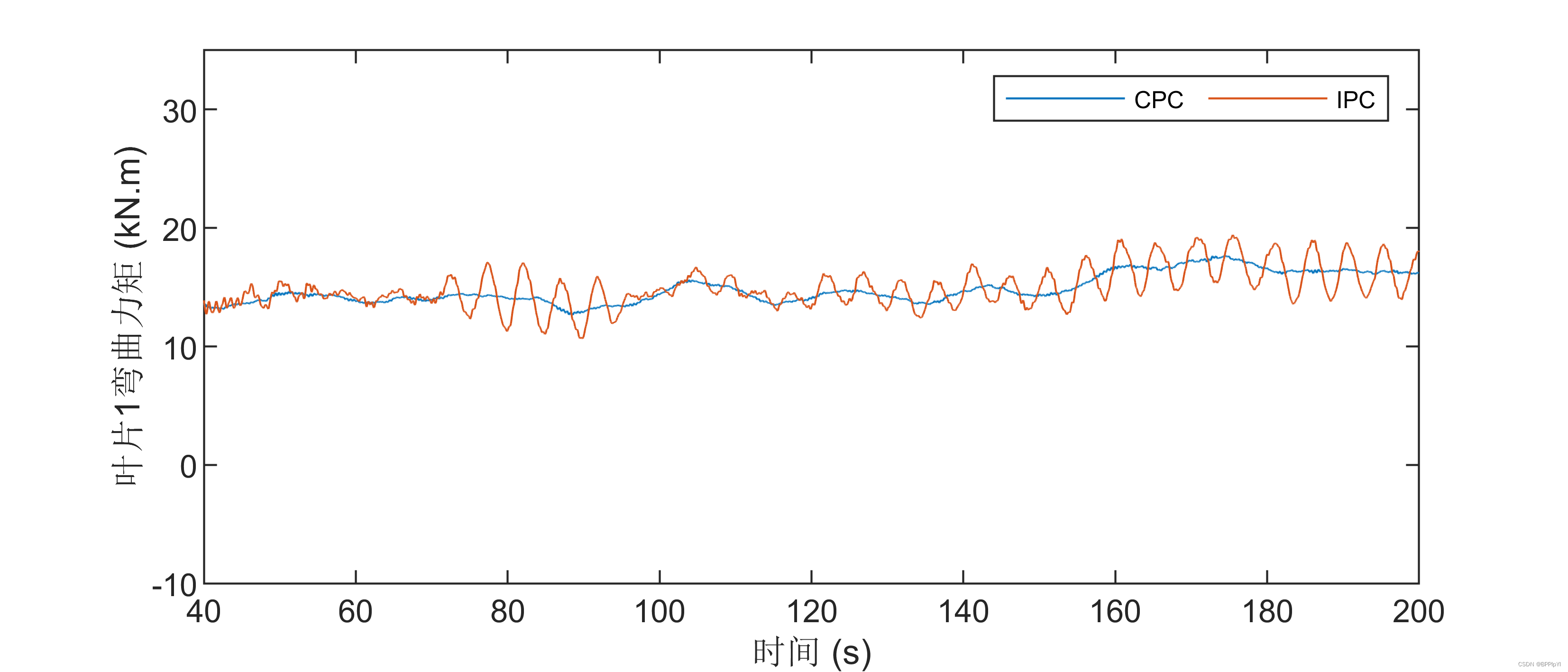
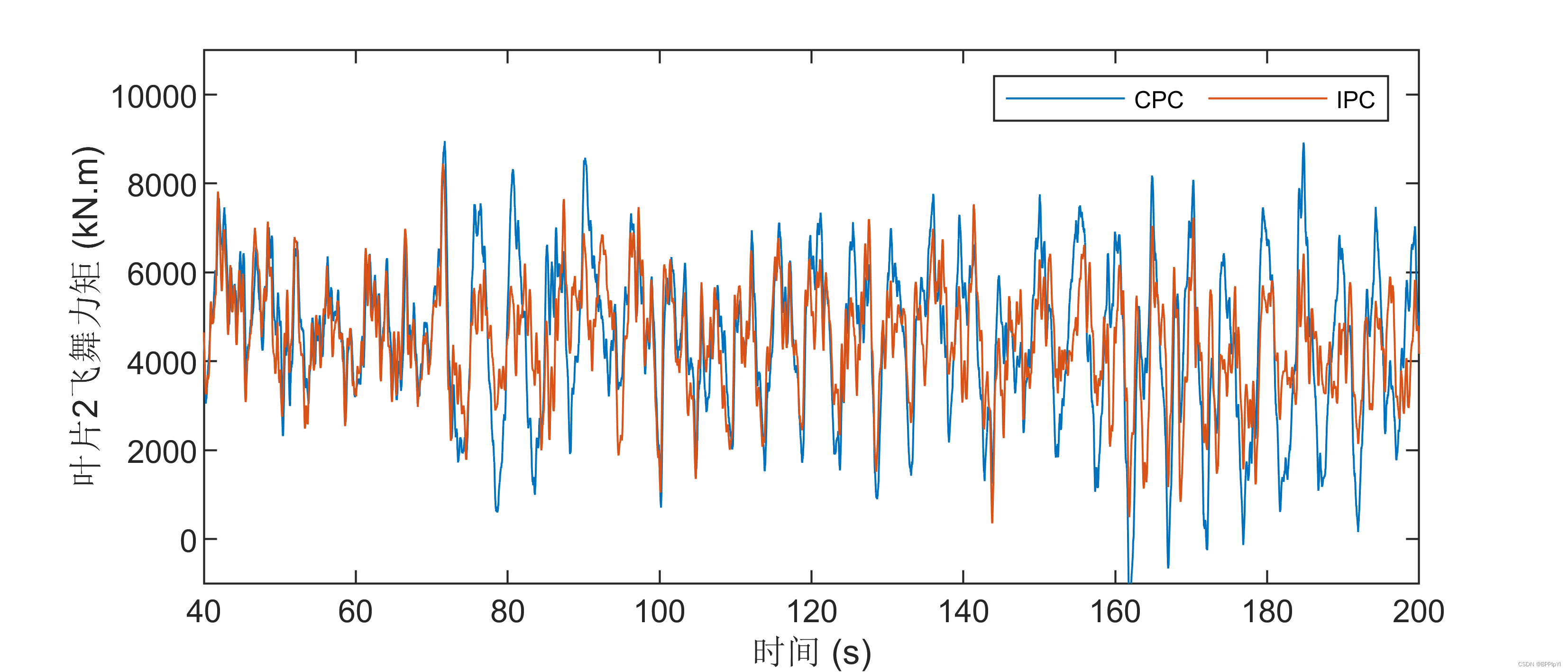
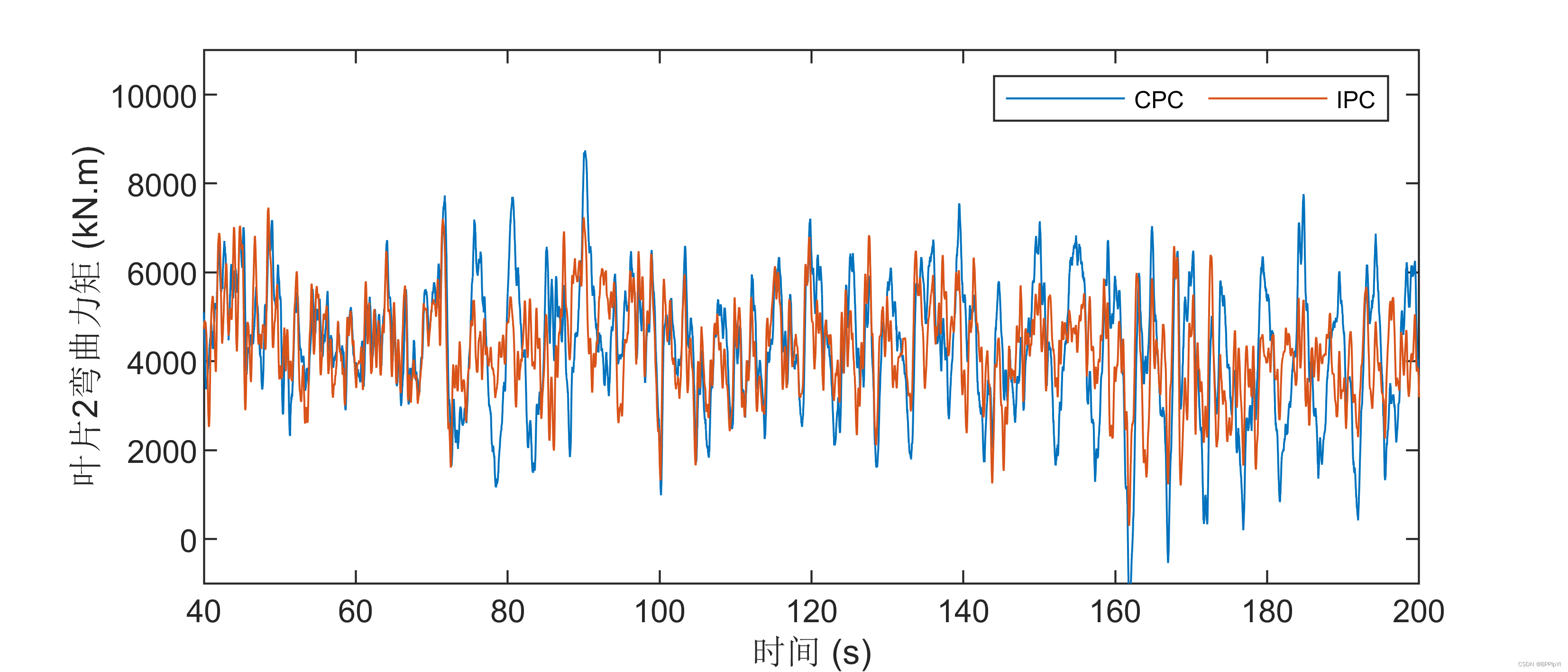
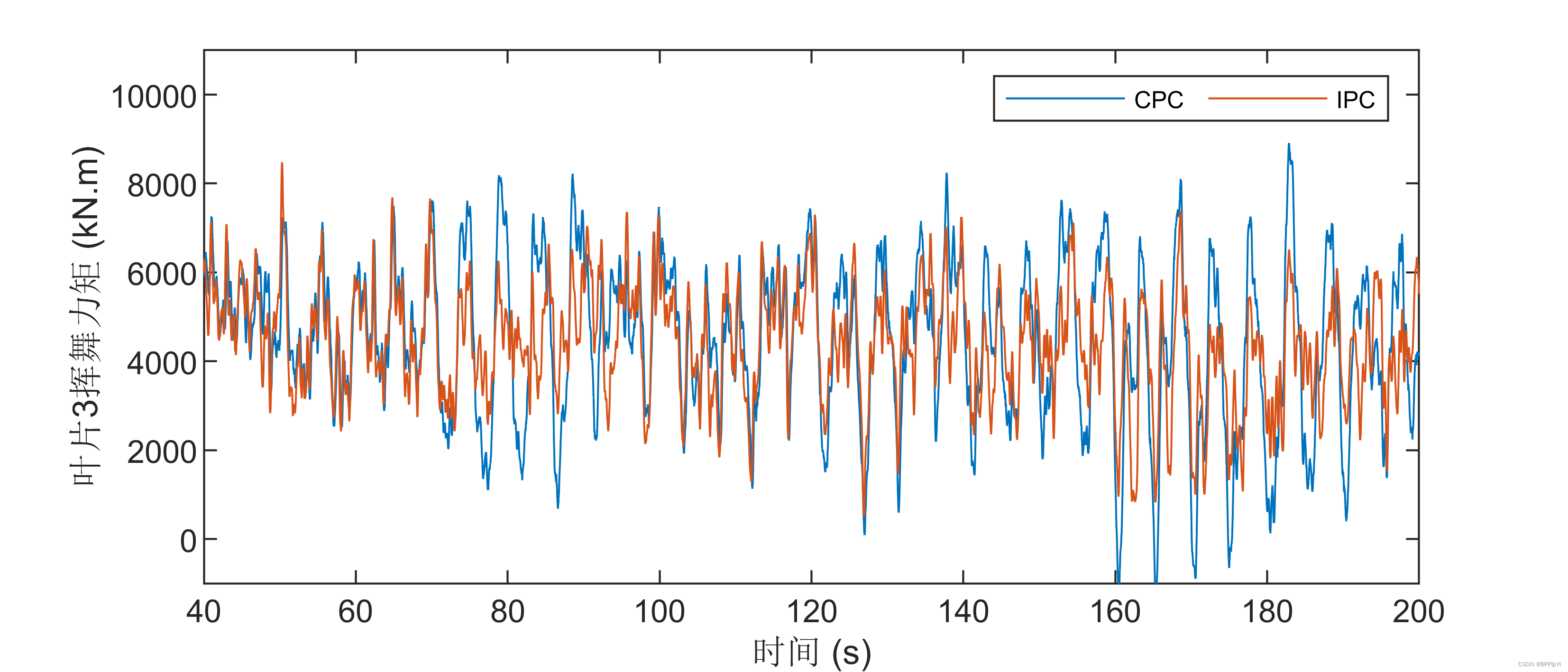
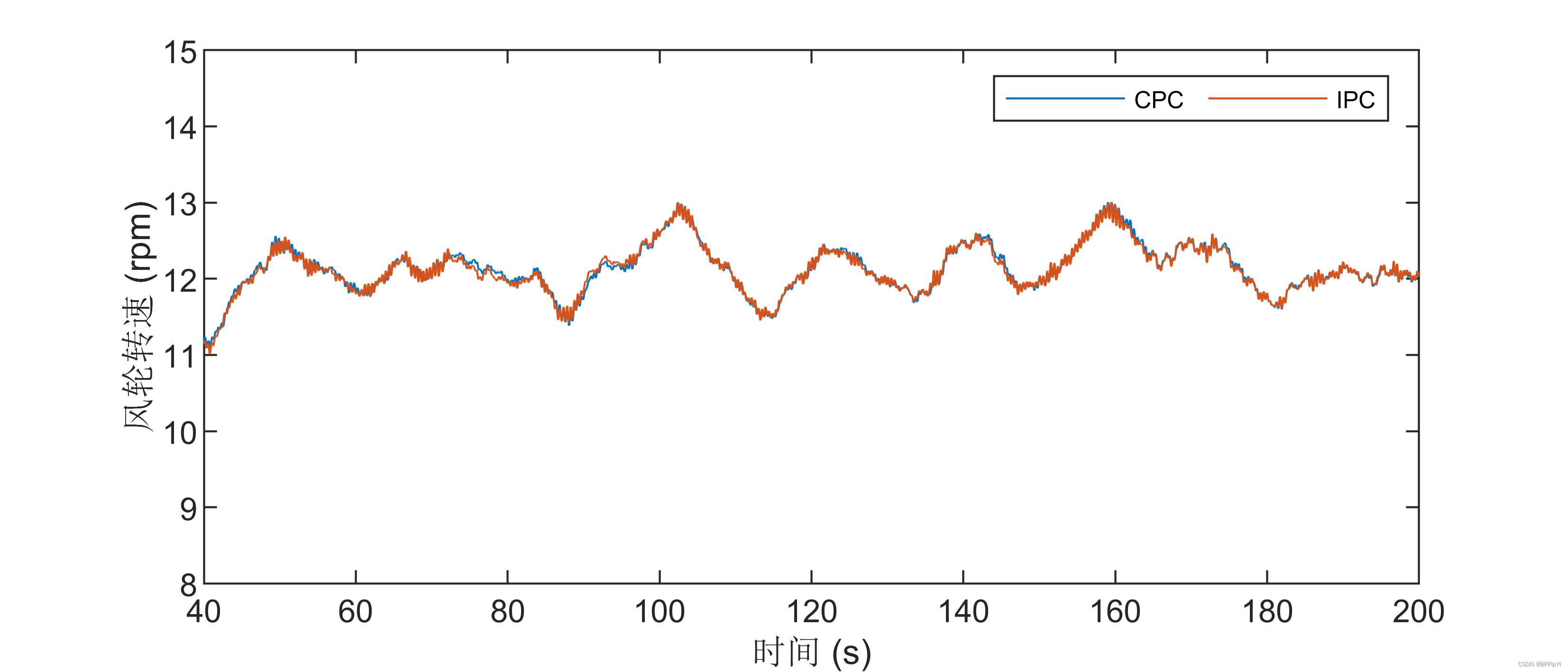
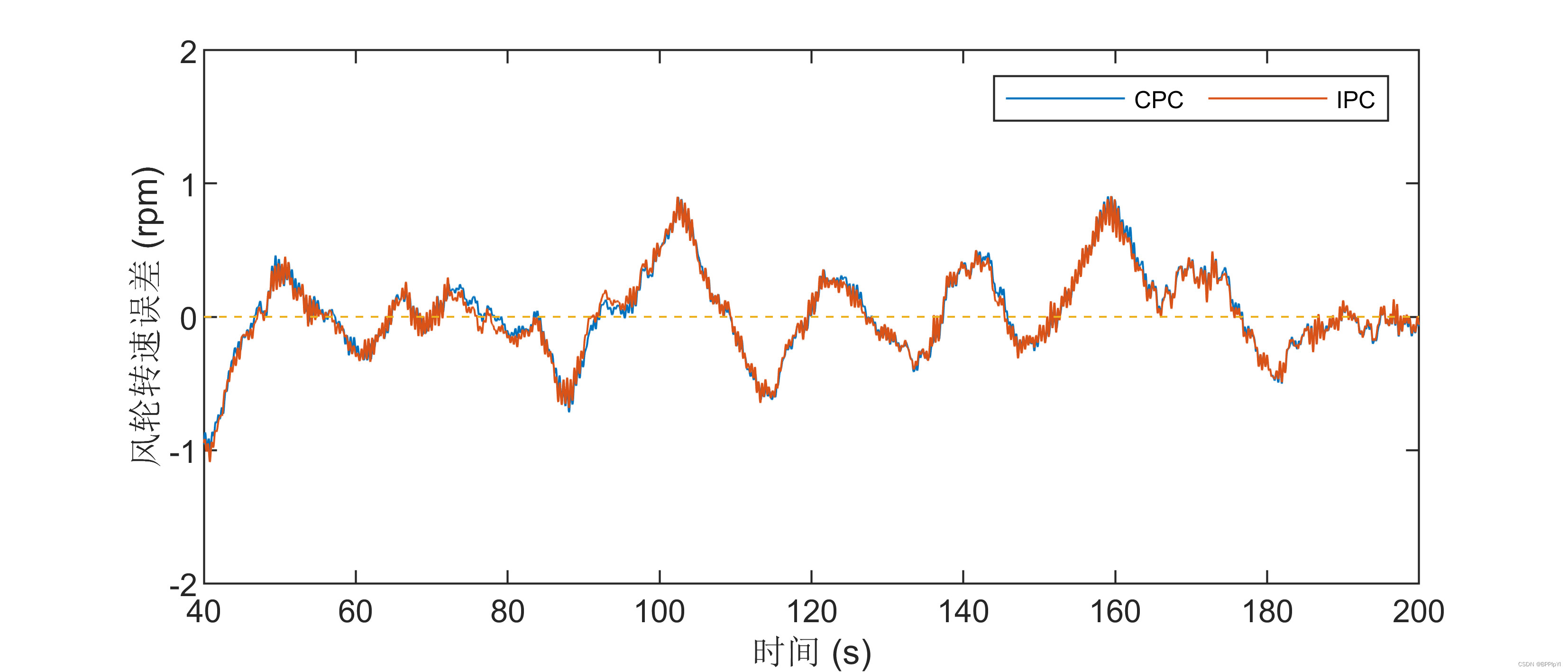
针对5MW非线性风机,我们设计了独立变桨控制和统一变桨控制两种控制算法。在仿真模型中,我们使用了链接simulink的scope,对转速、桨距角、叶片挥舞力矩、轮毂处偏航力矩、俯仰力矩等载荷数据进行了对比。我们还使用了trubsim生成的3D湍流风环境下模拟,模拟了不同风速下的风机运行情况。
在统一变桨控制下,我们选择了转速作为反馈信号,通过PID控制器对风机的转速进行控制。在独立变桨控制下,我们选择了叶根载荷作为反馈信号,通过PID控制器对风机叶片的角度进行控制。
实验结果表明,两种控制算法均可以有效地控制风机的运行状态,提高风机的能量利用效率和稳定性。与统一变桨控制相比,独立变桨控制可以更好地对风机的叶片角度进行控制,从而实现更好的能量转换效率。同时,我们还将模型与NREL免费提供的5MW风机参数建模相结合,得出了更加精确的仿真结果。
因此,本文所提出的基于FAST与MATLAB SIMULINK联合仿真模型的非线性风力发电机的PID独立变桨和统一变桨控制方法,可以为风力发电系统的控制算法研究提供重要参考,并具有一定的工程应用价值。
相关代码,程序地址:http://lanzouw.top/676981105363.html















 535
535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









