






主控芯片dsp tms320f28335,基于Matlab Simulink开发的嵌入式模型,模型可自动生成ccs工程代码,生成的代码可直接运行在主控芯片中。
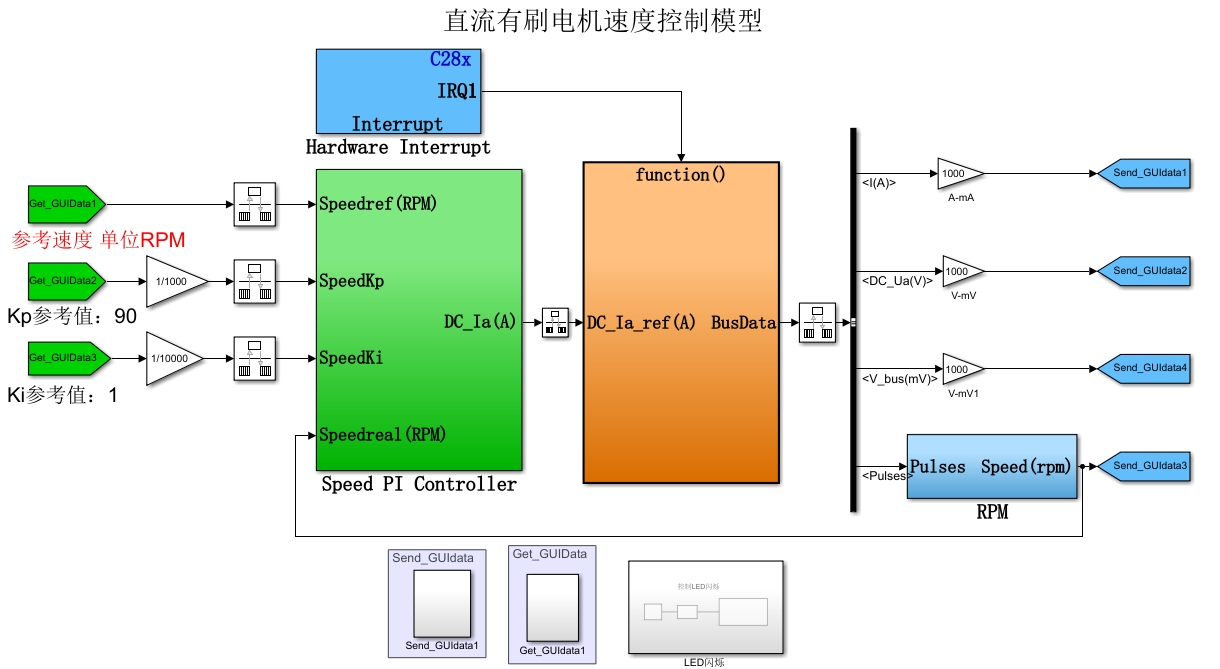
该模型利用PID控制算法,实现了直流有刷电机的速度电流双闭环控制。
ID:6699669808701165
利维能干的贝壳
主控芯片dsp tms320f28335作为一款高性能的嵌入式处理器,广泛应用于各种控制系统中。结合Matlab Simulink开发的嵌入式模型,使得开发人员能够快速构建复杂的控制系统,并生成可直接运行在主控芯片中的CCS工程代码。
嵌入式系统在现代控制领域中发挥着重要的作用。传统的控制算法中,常使用PID控制算法来实现闭环控制。而该模型利用PID控制算法,实现了直流有刷电机的速度电流双闭环控制。速度闭环控制可以通过对电机转速进行反馈来调整电机的输出,从而保持系统稳定性和输出精度。电流闭环控制可以对电机的电流进行反馈调整,从而实现对电机输出力矩的精确控制。
为了实现该控制算法,首先需要对PID控制算法进行理论分析。PID控制器由比例、积分和微分三个部分组成,通过对误差、误差积分和误差微分进行加权操作,实现对控制系统的调节。在该模型中,通过对电机的速度和电流进行实时采样,计算出误差值,并传递给PID控制器进行调节。
在嵌入式系统中,为了保证实时性和准确性,需要对PID控制算法进行优化。对于直流有刷电机的速度电流双闭环控制,可以使用不同的调节策略,如增量式PID算法,以提高系统的响应速度和稳定性。此外,还可以通过对PID控制器的参数进行调节,如调整比例系数、积分系数和微分系数,以满足不同的控制要求。
在模型开发中,Matlab Simulink提供了丰富的建模工具和仿真环境,方便开发人员对控制算法进行设计和验证。通过使用Simulink中的图形化界面,可以直观地构建系统模型,并在仿真环境中进行动态调试和优化。同时,Simulink还提供了自动生成CCS工程代码的功能,简化了开发流程,提高了开发效率。
生成的CCS工程代码可直接运行在主控芯片dsp tms320f28335上。主控芯片具有强大的计算和通信能力,能够实时处理各种数据,并与外部设备进行高速交互。通过将生成的代码下载到主控芯片中,可以实现对直流有刷电机的速度电流双闭环控制。主控芯片作为系统的核心处理器,具有高性能和稳定性,能够满足实时控制系统的需求。
总之,基于Matlab Simulink开发的嵌入式模型,结合主控芯片dsp tms320f28335,实现了直流有刷电机的速度电流双闭环控制。通过对PID控制算法的应用和优化,能够实时调节电机的输出,保持系统稳定性和输出精度。该模型的开发过程简便高效,生成的CCS工程代码可直接运行在主控芯片中,具有较高的实时性和准确性,满足了嵌入式控制系统的需求。
相关的代码,程序地址如下:http://wekup.cn/669808701165.html
















 414
414











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









