






fmod()函数用来计算两个浮点型数据的余数,可用于角度的归一化。
目录
一、fmod()函数定义
fmod()函数是C++中的一个数学函数,用于计算两个浮点数的模。它的原型如下:
double fmod(double x, double y);其中,x和y是要计算模的两个浮点数,函数返回值为x除以y的余数(double)。
二、使用步骤
1.头文件: #include<cmath>
2.使用案例:
#include <iostream>
#include <cmath>
using namespace std;
int main()
{
double x = 10.5, y = 3.2;
double result = fmod(x, y);
cout << "x % y = " << result << endl;
return 0;
}该例子中,我们使用了cmath头文件中的fmod()函数,计算了10.5除以3.2的余数,结果为0.9。
三、角度归一化案例:
三角函数为周期函数,反三角函数的计算结果按道理说有无数个,为了方便将其映射到一个周期内。而且C++中的反三角函数给出的结果映射到了[-pi, pi],计算角度时为了和C++标准库保持一致,也将角度值映射到这个区间。至于这个区间为什么是全闭区间,查看C++标准库(以std::arctan2为例)说明如下:
If no errors occur, the arc tangent of y/x (arctan(yx)) in the range [-π , +π] radians, is returned.
If x is -∞ and y is finite and positive, +π is returned
If x is -∞ and y is finite and negative, -π is returned1.Apollo中的角度归一化案例
double NormalizeAngle(const double angle) {
double a = std::fmod(angle + M_PI, 2.0 * M_PI);
if (a < 0.0) {
a += (2.0 * M_PI);
}
return a - M_PI;
}
Apollo的代码将角度值映射到了 [-pi, pi) ,左闭右开的区间,该代码对应的公式如下:
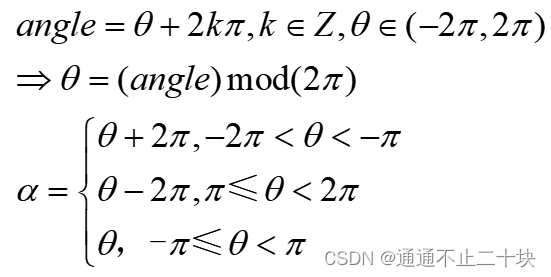
2.常规思路角度归一化案例
double NormalizeAngle(const double angle) {
double a = std::fmod(angle, 2.0 * M_PI);
if (a < -M_PI) {
a += (2.0 * M_PI);
} else if (a >= M_PI) { // 这里一般不加等号,为了和Apollo代码保持完全一致(映射到[-pi,pi))才加了等号。
a -= (2.0 * M_PI);
}
return a;
}
该代码对应的公式如下:
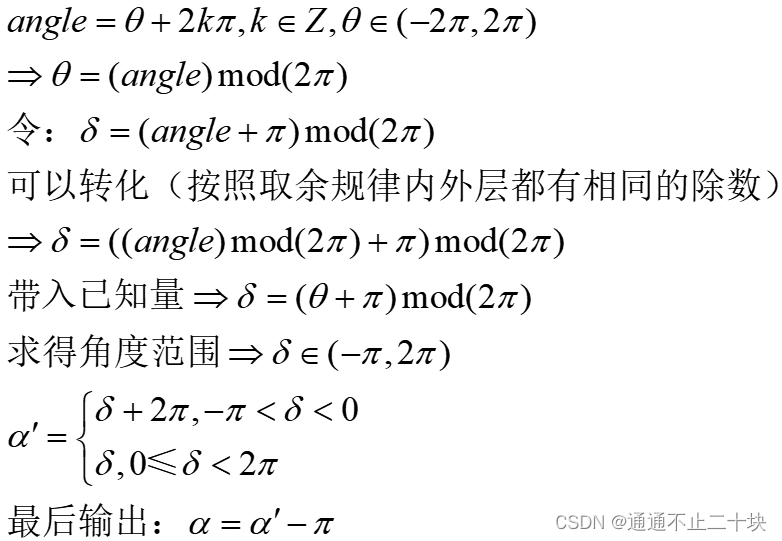
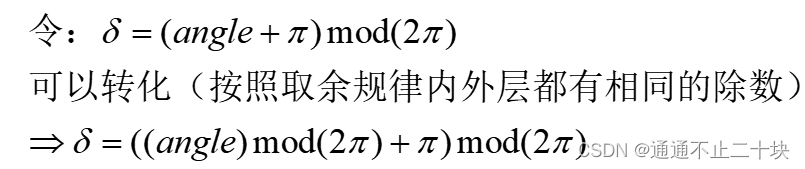
3.另外一种角度归一化思路
double NormalizeAngle(const double angle) {
double a = std::fmod(angle + M_PI, 2.0 * M_PI);
if (a < 0) {
a += M_PI;
} else {
a -= M_PI;
}
return a;
}
该代码对应的公式如下:

4.角度归一化总结
角度归一化主要在计算车辆航向角中使用,再涉及atan2()函数处理xy坐标的情况下要想到角度归一化问题,便于使用可以直接背过Apollo的归一化思路,代码较为简单,同时要记住复合取余的fmod()函数的规律,即:
参考链接
https://blog.csdn.net/weixin_44873133/article/details/124533355

















 1978
1978

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









