






基于DP动态规划的混合动力汽车,P2构型
1.车辆数据来源advisor。
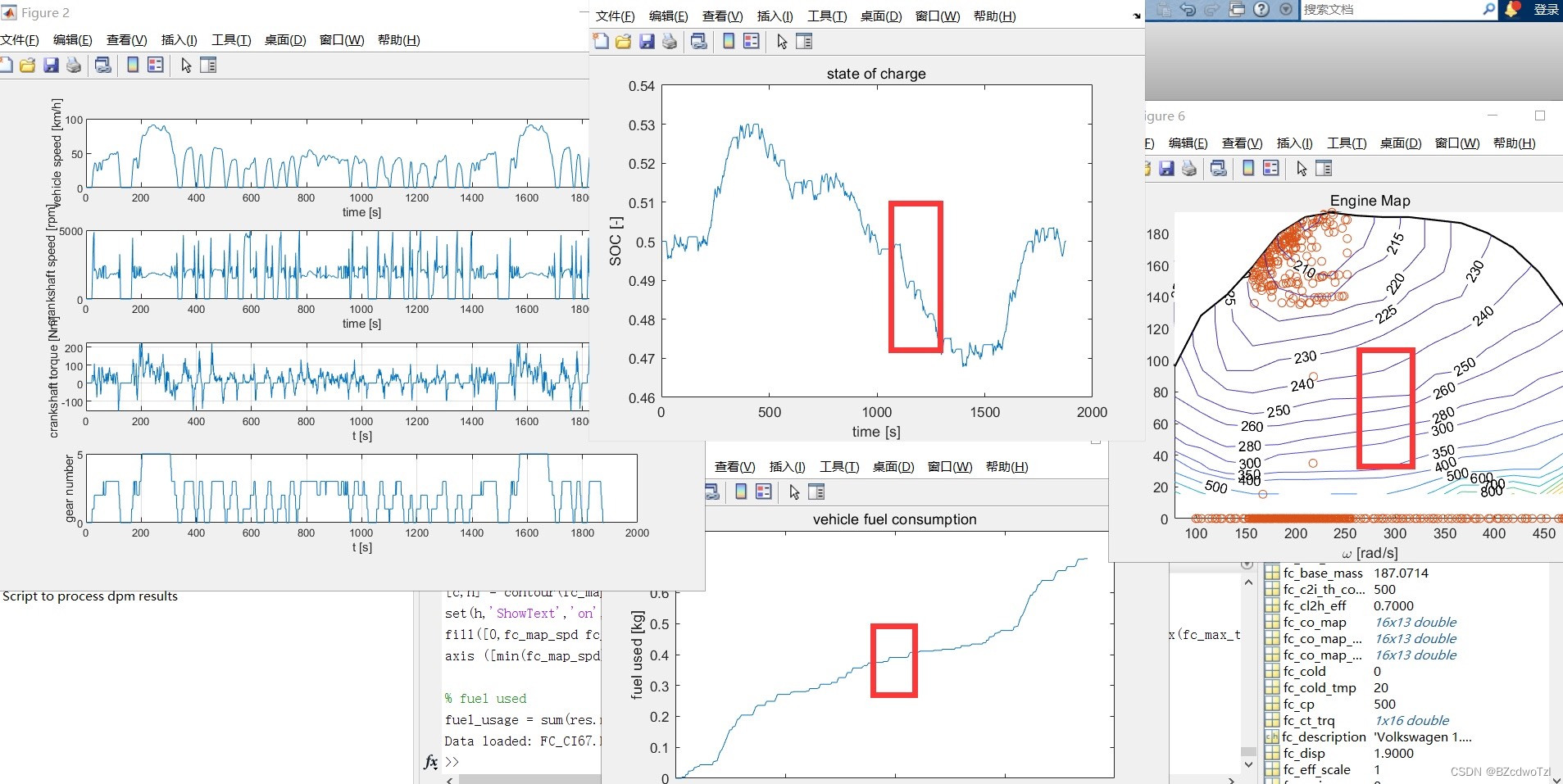
2.电池SOC为电量维持型策略。
3.全程序包含逆向迭代和正向寻优过程。
4.DP可为后续mpc提供参考,也可将数据提取作为神经网络训练和规则作为参考。
基于DP动态规划的混合动力汽车,P2构型
近年来,随着环保意识的逐渐加强,混合动力汽车逐渐成为了市场的主流选择。而为了更好地提高混合动力汽车的效率,在汽车控制领域,DP动态规划成为了一种常见的手段。本文就以基于DP动态规划的混合动力汽车,P2构型为例,介绍混合动力汽车中DP动态规划的应用。
- 车辆数据来源advisor。
首先,我们需要了解车辆数据来源于advisor。advisor是一种常见的汽车软件,可以帮助用户在多个方面进行汽车控制。其中,比较重要的一点是,它可以帮助我们收集汽车的数据。在混合动力汽车的控制中,我们需要获取各种类型的数据,包括电池电量、机械能量等等。这些数据都需要通过advisor进行数据获取。
- 电池SOC为电量维持型策略。
在混合动力汽车的控制中,电池SOC(State of Charge)是一个比较重要的参数。它表示电池里已经充电的能量的百分比。在基于DP动态规划的混合动力汽车中,我们采用的是电量维持型策略。这种策略是指,在汽车运动过程中,通过电机的控制,使得电池电量保持不变。这种策略的优点是可以增加动力和燃油效率,并且可以保护电池,避免因为长时间使用导致电池的损坏。
- 全程序包含逆向迭代和正向寻优过程。
在基于DP动态规划的混合动力汽车中,我们需要对汽车状态进行全过程的优化。全过程包括逆向迭代和正向寻优过程。逆向迭代是指,在汽车启动时,我们从最终状态反向迭代,找到最优的控制策略。而正向寻优过程是指,在汽车行驶过程中,我们需要根据实时的汽车状态,不断地优化控制策略,以使得汽车的行驶效率最大化。
- DP可为后续mpc提供参考,也可将数据提取作为神经网络训练和规则作为参考。
在混合动力汽车的控制中,DP动态规划不仅可以用于全程序控制策略的优化,还可以为后续的mpc提供参考。mpc(Model Predictive Control)是一种常见的汽车控制方法,它主要是通过对汽车模型的预测来进行控制。由于DP动态规划可以得到全过程的最优控制策略,因此可以作为mpc控制策略的参考。同时,我们也可以通过将混合动力汽车的数据提取出来,作为神经网络训练和规则作为参考,来进行更精准的控制。这样可以进一步提高混合动力汽车的效率和性能。
总结:
本文针对基于DP动态规划的混合动力汽车,P2构型进行了介绍。我们讨论了混合动力汽车控制中的各种问题,并详细描述了DP动态规划在混合动力汽车中的应用方法。通过本文的介绍,我们可以更好地了解混合动力汽车的控制和优化方法,以及DP动态规划在其中的应用和意义。
相关代码,程序地址:http://lanzouw.top/687471188286.html















 810
810











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









