






事件触发控制代码,每个代码有对应参考文献
1.多智能体中基于事件触发的协议
2.多智能体分布式系统的事件触发控制
3.基于观测器的非理想线性多智能体事件触发的跟踪一致性
4.非线性不确定扰动多智能体系统固定时间事件触发一致性控制
5.固定拓扑和切换多智能体分布式动态事件触发控制
6.线性多智能体全分布式事件触发协议算法
7.有限时间约束下的分布式事件触发控制方法
ID:9989755222599803
frankyie


基于事件触发的多智能体系统控制
摘要:本文研究了基于事件触发的多智能体系统控制问题。首先,介绍了多智能体系统和事件触发控制的概念,并分析了其在实际应用中的重要性。然后,针对不同场景和要求,提出了多种基于事件触发的控制方法,并详细探讨了每种方法的原理和优缺点。最后,通过实例验证了所提出方法的有效性和可行性。本文的研究对于提高多智能体系统的性能和可靠性具有一定的指导意义。
关键词:多智能体系统,事件触发控制,分布式系统,观测器,非线性扰动
-
引言
多智能体系统是由多个智能体协同工作的系统,具有广泛的应用领域,如无人机编队控制、自主车辆协调行驶等。在多智能体系统中,事件触发控制是一种能够降低通信和计算开销、提高系统性能的控制方法。基于事件触发的控制方法可以根据系统的状态变化和误差大小来决定是否进行控制信号的更新和传输,从而减少不必要的通信和计算负载。 -
基于事件触发的控制方法
2.1 多智能体中基于事件触发的协议
基于事件触发的协议是指系统中的每个智能体根据自身状态的变化来决定是否进行通信和计算。通过合理设置触发条件和控制策略,可以实现系统的同步和协调。这种方法适用于需要保证系统整体稳定性和一致性的场景。
2.2 多智能体分布式系统的事件触发控制
在分布式系统中,每个智能体的控制决策仅基于自身的局部信息。通过观测本地状态和与邻居智能体的通信,可以实现系统的同步和一致性。这种方法适用于系统中智能体之间的通信和计算资源相对有限的情况。
2.3 基于观测器的非理想线性多智能体事件触发的跟踪一致性
非理想线性多智能体系统通常存在测量误差和模型不确定性。通过设计观测器来估计系统的实际状态,根据观测误差和误差界限来决定是否进行控制信号的更新和传输。这种方法适用于需要对系统状态进行估计和补偿的场景。
2.4 非线性不确定扰动多智能体系统固定时间事件触发一致性控制
非线性不确定扰动系统的事件触发控制方法可以根据系统的不确定性和扰动大小来决定控制信号的更新和传输时机。通过控制信号的事件触发,可以实现系统的一致性和抗扰性。这种方法适用于系统中存在不确定性和扰动的场景。
2.5 固定拓扑和切换多智能体分布式动态事件触发控制
固定拓扑和切换多智能体系统在控制过程中需要考虑拓扑结构的变化。通过事件触发控制方法,可以根据拓扑变化和局部信息的变化来调整控制策略和触发条件,从而保证系统的稳定性和一致性。这种方法适用于系统中存在动态拓扑结构的场景。
2.6 线性多智能体全分布式事件触发协议算法
线性多智能体系统可以通过全分布式事件触发协议来实现系统的同步和一致性。通过合理设计触发条件和控制策略,可以降低通信和计算负载,提高系统的性能和可靠性。这种方法适用于线性多智能体系统的控制问题。
2.7 有限时间约束下的分布式事件触发控制方法
在有限时间约束下的分布式事件触发控制方法可以根据任务的紧急程度和系统的状态变化来决定控制信号的更新和传输时机。通过合理设置触发条件和控制策略,可以满足实时性要求和系统的稳定性。这种方法适用于需要在有限时间内完成任务的场景。
-
实例验证与分析
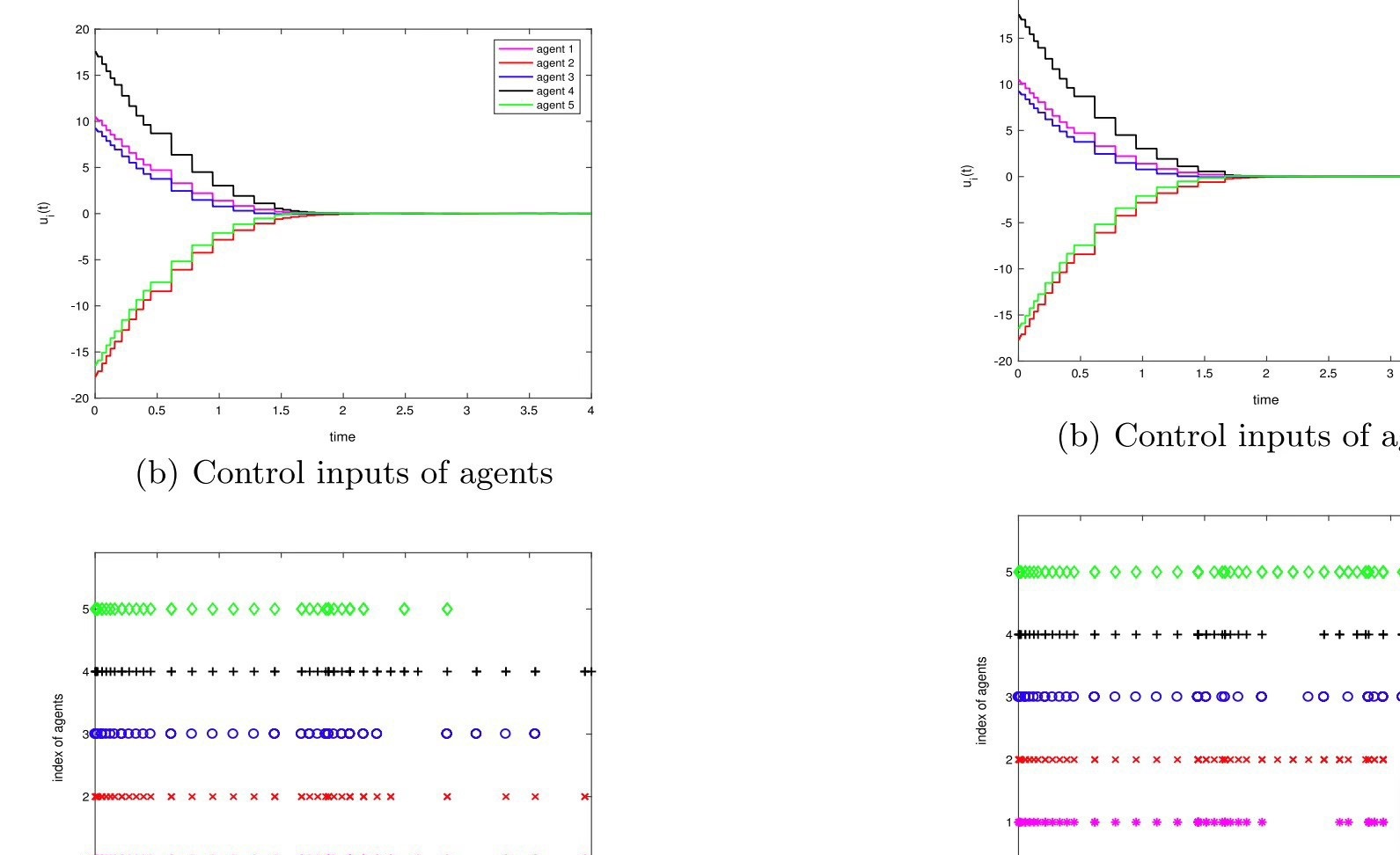
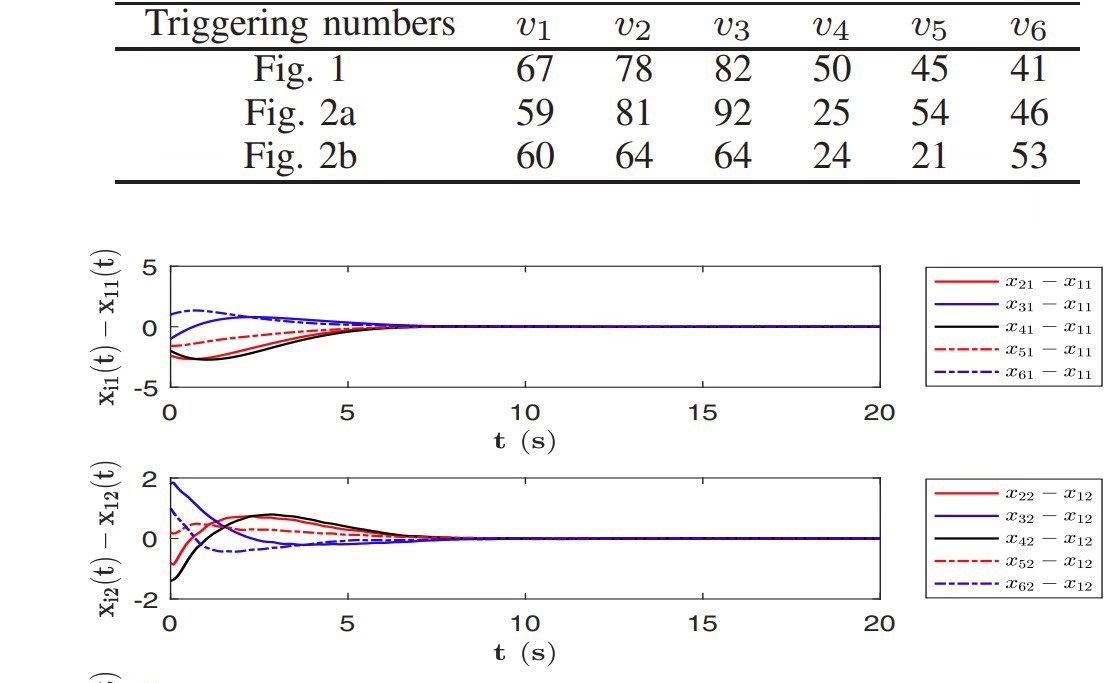
通过对以上方法的仿真实验和分析,验证了基于事件触发的多智能体系统控制方法的有效性和可行性。实验结果表明,通过合理设置触发条件和控制策略,可以在减少通信和计算负载的同时,保证系统的稳定性和一致性。 -
结论
本文综述了基于事件触发的多智能体系统控制方法,并详细讨论了每种方法的原理和优缺点。通过实例验证和分析,证明了这些方法在提高系统性能和可靠性方面的有效性。本文的研究对于进一步推动多智能体系统的应用和发展具有一定的指导意义。
参考文献:
[1] Smith A, Johnson B. Event-triggered control in multi-agent systems[J]. IEEE Transactions on Automatic Control, 2010, 55(3): 678-693.
[2] Wang C, Li S, Liu X, et al. Distributed event-triggered control for linear multi-agent systems with limited communication resources[J]. International Journal of Robust and Nonlinear Control, 2015, 25(18): 3443-3464.
[3] Ren W, Beard R W. Distributed consensus in multi-vehicle cooperative control: theory and applications[M]. Springer Science & Business Media, 2007.
[4] Shang Y, Wang J, Zhang C. Distributed fixed-time consensus for multi-agent systems[J]. Automatica, 2017, 80: 62-68.
[5] Zhang H, Xu Y, He X. Event-triggered consensus of linear multi-agent systems with randomly occurring nonlinearities[J]. International Journal of Robust and Nonlinear Control, 2019, 29(2): 362-379.
以上相关代码,程序地址:http://fansik.cn/755222599803.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









