







网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
已剪辑自: https://zhuanlan.zhihu.com/p/64519280
[导读]被称作是“飞行器的大脑”的飞控到底是什么?
以前,搞无人机的十个人有八个是航空、气动、机械出身,更多考虑的是如何让飞机稳定飞起来、飞得更快、飞得更高。如今,随着芯片、人工智能、大数据技术的发展,无人机开始了智能化、终端化、集群化的趋势,大批自动化、机械电子、信息工程、微电子的专业人材投入到了无人机研发大潮中,几年的时间让无人机从远离人们视野的军事应用飞入了寻常百姓家、让门外汉可以短暂的学习也能稳定可靠的飞行娱乐。不可否认,飞控技术的发展是这十年无人机变化的最大推手。
飞控是什么?
飞行控制系统(Flight control system)简称飞控,可以看作飞行器的大脑。多轴飞行器的飞行、悬停,姿态变化等等都是由多种传感器将飞行器本身的姿态数据传回飞控,再由飞控通过运算和判断下达指令,由执行机构完成动作和飞行姿态调整。
控可以理解成无人机的CPU系统,是无人机的核心部件,其功能主要是发送各种指令,并且处理各部件传回的数据。类似于人体的大脑,对身体各个部位发送指令,并且接收各部件传回的信息,运算后发出新的指令。例如,大脑指挥手去拿一杯水,手触碰到杯壁后,因为水太烫而缩回,并且将此信息传回给大脑,大脑会根据实际情况重新发送新的指令。
无人机的飞行原理及控制方法(以四旋翼无人机为例)
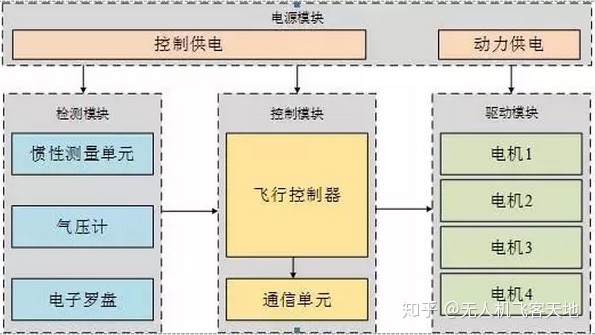
四旋翼无人机一般是由检测模块,控制模块,执行模块以及供电模块组成。检测模块实现对当前姿态进行量测;执行模块则是对当前姿态进行解算,优化控制,并对执行模块产生相对应的控制量;供电模块对整个系统进行供电。
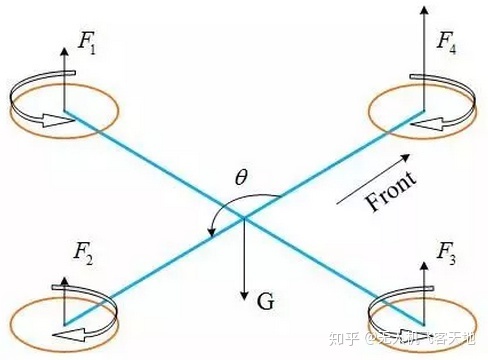
四旋翼无人机机身是由对称的十字形刚体结构构成,材料多采用质量轻、强度高的碳素纤维;在十字形结构的四个端点分别安装一个由两片桨叶组成的旋翼为飞行器提供飞行动力,每个旋翼均安装在一个电机转子上,通过控制电机的转动状态控制每个旋翼的转速,来提供不同的升力以实现各种姿态;每个电机均又与电机驱动部件、中央控制单元相连接,通过中央控制单元提供的控制信号来调节转速大小;IMU惯性测量单元为中央控制单元提供姿态解算的数据,机身上的检测模块为无人机提供了解自身位姿情况最直接的数据,为四旋翼无人机最终实现复杂环境下的自主飞行提供了保障。
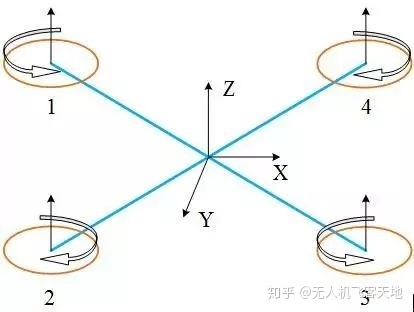
现将位于四旋翼机身同一对角线上的旋翼归为一组,前后端的旋翼沿顺时针方向旋转,从而可以产生顺时针方向的扭矩;而左右端旋翼沿逆时针方向旋转,从而产生逆时针方向的扭矩,如此四个旋翼旋转所产生的扭矩便可相互之间抵消掉。由此可知,四旋翼飞行器的所有姿态和位置的控制都是通过调节四个驱动电机的速度实现的。一般来说,四旋翼无人机的运动状态主要分为悬停、垂直运动、滚动运动、俯仰运动以及偏航运动五种状态。
悬停
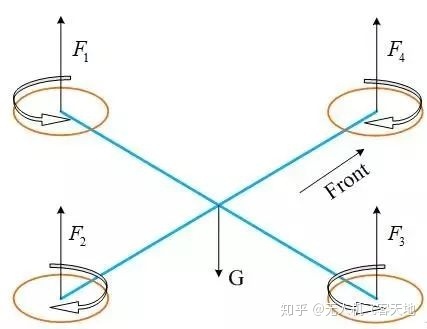
悬停状态是四旋翼无人机具有的一个显著的特点。在悬停状态下,四个旋翼具有相等的转速,产生的上升合力正好与自身重力相等,即。并且因为旋翼转速大小相等,前后端转速和左右端转速方向相反,从而使得飞行器总扭矩为零,使得飞行器静止在空中,实现悬停状态。
垂直运动
垂直运动是五种运动状态中较为简单的一种,在保证四旋翼无人机每个旋转速度大小相等的倩况下,同时对每个旋翼增加或减小大小相等的转速,便可实现飞行器的垂直运动。当同时増加四个旋翼转速时,使得旋翼产生的总升力大小超过四旋翼无人机的重力时,即,四旋翼无人机便会垂直上升;反之,当同时减小旋翼转速时,使得每个旋翼产生的总升力小于自身重力时,即,四旋翼无人机便会垂直下降,从而实现四旋翼无人机的垂直升降控制。
翻滚运动
翻滚运动是在保持四旋翼无人机前后端旋翼转速不变的情况下,通过改变左右端的旋翼转速,使得左右旋翼之间形成一定的升力差,从而使得沿飞行器机体左右对称轴上产生一定力矩,导致在方向上产生角加速度实现控制的。如图2.3所示,增加旋翼1的转速,减小旋翼3的转速,则飞行器倾斜于右侧飞行;相反,减小旋翼4,增加旋翼2,则飞行器向左倾斜飞行。
俯仰运动
四旋翼飞行器的俯仰运动和滚动运动相似,是在保持机身左右端旋翼转速不变的前提下,通过改变前后端旋翼转速形成前后旋翼升力差,从而在机身前后端对称轴上形成一定力矩,引起角方向上的角加速度实现控制的。如图2.4所示,增加旋翼3的转速,减小旋翼1的转速,则飞行器向前倾斜飞行;反之,则飞行器向后倾斜。
偏航运动
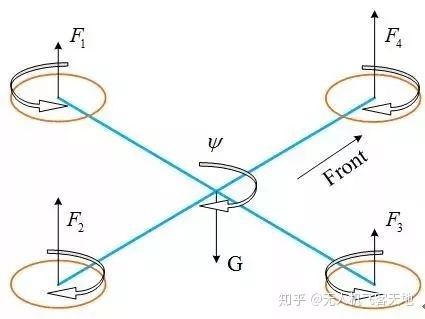
四旋翼的偏转运动是通过同时两两控制四个旋翼转速实现控制的。保持前后端或左右端旋翼转速相同时,其便不会发生俯仰或滚动运动;而当每组内的两个旋翼与另一组旋翼转速不同时,由于两组旋翼旋转方向不同,便会导致反扭矩力的不平衡,此时便会产生绕机身中心轴的反作用力,引起沿角角加速度。如图2.3所示,当前后端旋翼的转速相等并大于左右端旋翼转速时,因为前者沿顺时针方向旋转,后者相反,总的反扭矩沿逆时针方向,反作用力作用在机身中心轴上沿逆时针方向,引起逆时针偏航运动;反之,则会引起飞行器的顺时针偏航运动。
综上所述,四旋翼无人机的各个飞行状态的控制是通过控制对称的四个旋翼的转速,形成相应不同的运动组合实现的。但是在飞行过程中却有六个自由度输出,因此它是一种典型的欠驱动,强耦合的非线性系统。例如,旋翼1的转速会导致无人机向左翻滚,同时逆时针转动的力矩会大于顺时针的力矩,从而进一步使得无人机向左偏航,此外翻滚又会导致无人机的向左平移,可以看出,四旋翼无人机的姿态和平动是耦合的。
四旋翼无人机自主飞行的控制
四旋翼无人机的精确航迹跟踪是实现无人机自主飞行的基本要求。由于四旋翼无人机自身存在姿态与平动的耦合关系以及模型参数不确定性与外界扰动,因此只有实现姿态的稳定控制才能完成航迹的有效跟踪。
在四旋翼无人机的自主控制系统中,姿态稳定控制是实现飞行器自主飞行的基础。其任务是控制四旋翼无人机的三个姿态角(俯仰角、滚转角、偏航角)稳定地跟踪期望姿态信号,并保证闭环姿态系统具有期望的动态特性。由于四旋翼无人机姿态与平动的耦合特点,分析可以得知,只有保证姿态达到稳定控制,才使得旋翼总升力在期望的方向上产生分量,进而控制飞行器沿期望的航迹方向飞行。而四旋翼无人机的姿态在实际飞行环境中回受到外界干扰和不精确模型的参数误差、测量噪声等未建模动态对控制效果的影响。所以,需要引入适当的观测器和控制器对总的不确定性进行估计和补偿,并对其估计的误差进行补偿,来保证四旋翼无人机在外界存在干扰下对姿态的有效跟踪。
四旋翼无人机的姿态控制应根据其实际的工作特性以及动力学模型,进而针对姿态的三个通道(俯仰,翻滚和偏航)分别设计姿态控制器,每个通道中都对应引入相应的控制器,其流程如下所示。

此方法可以基本保证每个通道的实际姿态值跟踪上期望值。但是,在只考虑对模型本身进行控制时,没有考虑到外部不确定性对闭环系统的影响。微小型无人机在飞行时,由于机体较小,电机的振动较强,很容易受到外界环境的干扰。因此,整个通道中必然存在不确定因素,比如模型误差、环境干扰、观测误差等,这些不确定性将降低系统的闭环性能。所以在设计无人机控制系统时,必须要考虑系统的抗干扰性能,即闭环系统的鲁棒性。因此需要设计一定的干扰补偿器对干扰进行逼近和补偿,以实现姿态角的稳定跟踪。

只有在保证飞机姿态可以保持稳定才能进一步讨论如何控制路径保持稳定,在时间尺度上进行分析,飞机的姿态角变化的频率要大于飞机位置的频率。所以,针对轨迹跟踪应当使用内外双环控制,内环控制姿态角,外环控制位置。
无人机飞控系统组成及作用
IMU惯性测量单元
现在的飞控内部使用的都是由三轴陀螺仪,三轴加速度计,三轴地磁传感器和气压计组成的一个IMU,也称惯性测量单元。那么什么是三轴陀螺仪,什么是三轴加速度计,什么是三轴地磁传感器呢,什么是气压计呢?它们在飞机上起到的是什么作用呢,这三轴又是哪三个轴呢?

三轴陀螺仪,三轴加速度计,三轴地磁传感器中的三轴指的就是飞机左右,前后垂直方向上下这三个轴,一般都用XYZ来代表。左右方向在飞机中叫做横滚,前后方向在飞机中叫做俯仰,垂直方向就是Z轴。陀螺都知道,小时候基本上都玩过,在不转动的情况下它很难站在地上,只有转动起来了,它才会站立在地上,或者说自行车,轮子越大越重的车子就越稳定,转弯的时候明显能够感觉到一股阻力,这就是陀螺效应,根据陀螺效应,聪明的人们发明出的陀螺仪。最早的陀螺仪是一个高速旋转的陀螺,通过三个灵活的轴将这个陀螺固定在一个框架中,无论外部框架怎么转动,中间高速旋转的陀螺始终保持一个姿态。通过三个轴上的传感器就能够计算出外部框架旋转的度数等数据。
由于成本高,机械结构的复杂,现在都被电子陀螺仪代替,电子陀螺仪的优势就是成本低,体积小重量轻,只有几克重,稳定性还有精度都比机械陀螺高。说道这,大家也就明白陀螺仪在飞控中起到的作用了吧,它就是测量XYZ三个轴的倾角的。
那么三轴加速度计时干什么的呢?刚刚说道三轴陀螺仪就是XYZ三个轴,现在不用说也就明白三轴加速度计也是XYZ三个轴。当我们开车起步的一瞬间就会感到背后有一股推力,这股推力呢就是加速度,加速度是速度变化量与发生这一变化时间的比值,是描述物体变化快慢的物理量,米每二次方秒,例如一辆车在停止状态下,它的加速度是0,起步后,从每秒0米到每秒10米,用时10秒,这就是这辆车的加速度,如果车速每秒10米的速度行驶,它的加速度就是0,同样,用10秒的时间减速,从每秒10米减速到每秒5米,那么它的加速就是负数。三轴加速度计就是测量飞机XYZ三个轴的加速度。

我们日常出行都是根据路标或记忆来寻找自己的面向的,地磁传感器就是感知地磁的,就是一个电子指南针,它可以让飞机知道自己的飞行朝向,机头朝向,找到任务位置和家的位置。气压计呢就是测量当前位置的大气压,都知道高度越高,气压越低,这就是人到高原之后为什么会有高原反应了,气压计是通过测量不同位置的气压,计算压差获得到当前的高度,这就是整个IMU惯性测量单元,它在飞机中起到的作用就是感知飞机姿态的变化,例如飞机当前是前倾还是左右倾斜,机头朝向、高度等最基本的姿态数据,那么这些数据在飞控中起到的作用是什么呢?

飞控最基本的功能控制一架飞机在空中飞行时的平衡,是由IMU测量,感知飞机当前的倾角数据通过编译器编译成电子信号,将这个信号通过信号新时时传输给飞控内部的单片机,单片机负责的是运算,根据飞机当前的数据,计算出一个补偿方向,补偿角,然后将这个补偿数据编译成电子信号,传输给舵机或电机,电机或舵机在去执行命令,完成补偿动作,然后传感器感知到飞机平稳了,将实时数据再次给单片机,单片机会停止补偿信号,这就形成了一个循环,大部分飞控基本上都是10HZ的内循环,也就是1秒刷新十次。
这就是飞控最基本的功能,如果没有此功能,当一个角一旦倾斜,那么飞机就会快速的失去平衡导致坠机,或者说没有气压计测量不到自己的高度位置就会一直加油门或者一直降油门。其次,固定翼飞控还有空速传感器,空速传感器一般位于机翼上或机头,但不会在螺旋桨后边,空速传感器就是两路测量气压的传感器,一路测量静止气压,一路测量迎风气压,在计算迎风气压与静止气压的压差就可以算出当前的空气流速。


既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上Go语言开发知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
盖了95%以上Go语言开发知识点,真正体系化!**
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新















 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









