






标准步骤
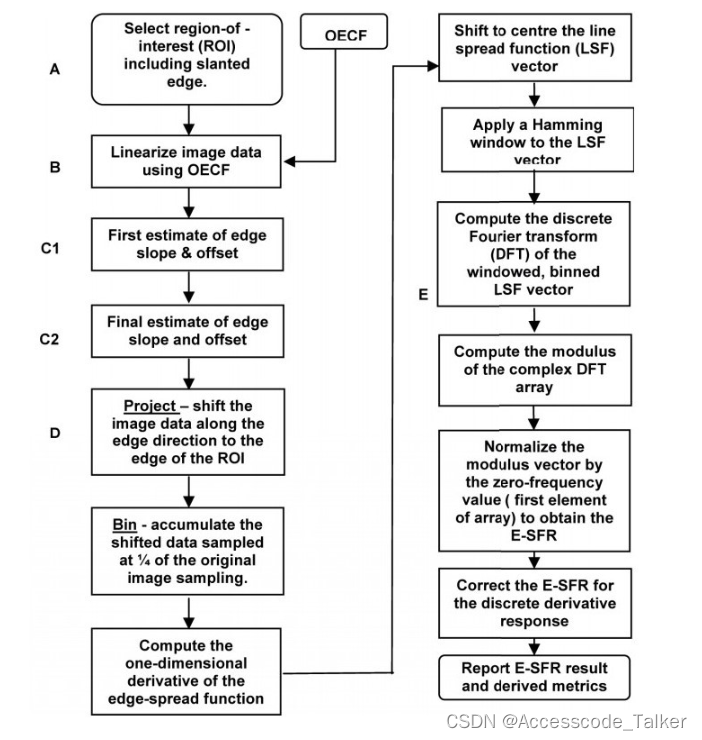
操作步骤
1,选择ROI
2,图像线性化转化为有效曝光(gamma反变换,将相机光电转换功能(OECF)转换为焦平面曝光或场景亮度的数字信号转换)
3,边缘位置估计
- 3.1,计算每一行的一维导数(每行的ESF)
- 3.2,计算每一行的边缘位置
- 3.3,综合每一行图像计算拟合边缘位置的斜率和截距
4,边缘扩展函数ESF
5,线扩散函数LSF
6,傅里叶变换DFT
步骤详解
一、选择ROI

- 水平方向斜边
- 左暗右亮
引入我所用到的包
import cv2
from matplotlib.lines import lineStyles
import numpy as np
import matplotlib.pyplot as plt
导入图像
img = cv2.imread(r"C:\Users\Thinkpad\Desktop\123.jpg")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#使用灰度图像
二、线性化处理
gamma变换公式:
O
=
c
∗
I
γ
O=c*I^γ
O=c∗Iγ
- O:输出灰度级别
- I:输入灰度级别
- c:参数
- γ:调整参数,较小时降低对比度,较高时增加对比度
根据定义,线性化即为将图像还原
我这边简化了操作,把系数c设为1,那么将上面的输出O代入下面的公式
推导线性化公式即为:
L
u
m
i
n
a
n
c
e
=
O
1
/
γ
=
(
I
γ
)
1
/
γ
=
I
Luminance = O^{1/γ}=(I^γ)^{1/γ}=I
Luminance=O1/γ=(Iγ)1/γ=I
不确定这线性化公式对不对,没有找到相关资料
def luminance_trance(image,gamma = 0.5):#这个gamma是可调整的,通常设为0.5左右
return np.power(image,1/gamma)
img_lum = luminance_trance(gray)
cv2.imshow("img_correct ",img_lum )
cv2.waitKey(0)
得到的图像结果:
三、边缘位置估计
边缘位置公式贴图:
3.1 计算每一行的一维导数
对于得到的阵列中的每一行像素,线性化图像数据的导数是使用有限冲激响应(FIR)滤波器。结果是一个数组,它的大小与输入ROI大小相同。该导数矩阵的一维质心是逐行计算的,以确定每一条线上的边的位置。
将上述公式进行步骤拆分,先进行求导:
Φ
(
p
+
1
,
r
)
−
Φ
(
p
,
r
)
Φ(p+1,r)-Φ(p,r)
Φ(p+1,r)−Φ(p,r)
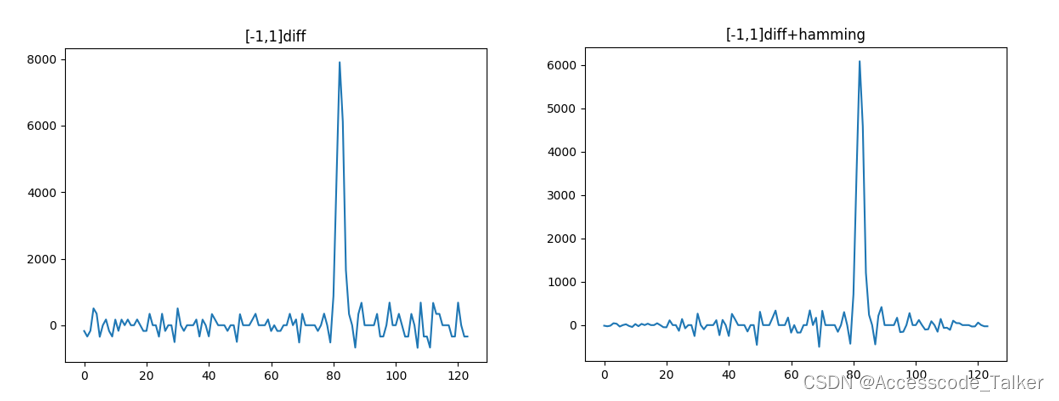
这里对于这个公式的使用我找到了不同的版本,基本是基于不同的滤波器,
当滤波器为[-1,1],将滤波器应用到每一行像素
这里介绍python函数:
np.diff()☞函数用法
这是个用于计算差分的函数,对于一维数组的差分则近似于求导
h,w = gray.shape#获取图像的高和宽
for i in range(h):#逐行求导
single_row= img_lum[i].astype(int)#因为差分后会出现负数,所以将uint8转化为int
diff_row = np.diff(single_row)
hamming_window_1 = np.hamming(len(diff_row))#汉明窗
diff_row = diff_row*hamming_window_1#将每一行的数据进行汉明滤波
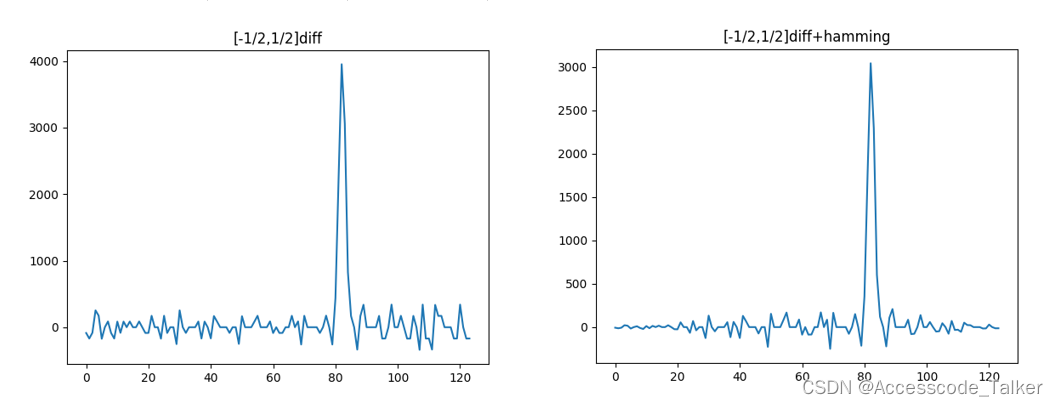
当系数Φ=1/2,即滤波器为[-1/2,1/2]时np.diff()将不再实用,这里我没有找到合适的函数,尝试使用如下函数:
np.convolve()☞函数用法
这是一个处理卷积的函数
根据离散线性卷积的步骤,该函数会对卷积核做180度反转,然后再进行滑动滤波。因此,当滤波器为[-1/2,1/2]时,卷积核即为[1/2,-1/2]
kernel = np.array([0.5,-0.5])
for i in range(h):
single_row= img_lum[i].astype(int)#因为差分后会出现负数,所以将uint8转化为int
#diff_row = np.diff(single)
diff_row = np.convolve(single_row,kernel,mode="valid")#自定义的求导
hamming_window_1 = np.hamming(len(diff_row))#汉明窗
diff_row = diff_row*hamming_window_1#将每一行的数据进行汉明滤波
在上述的方法中,我不仅进行了求导,还应用了汉明窗滤波
下面展示的时两种求导方式以及运用汉明窗的区别
[-1,1]滤波求导:
[-1/2,1/2]滤波求导
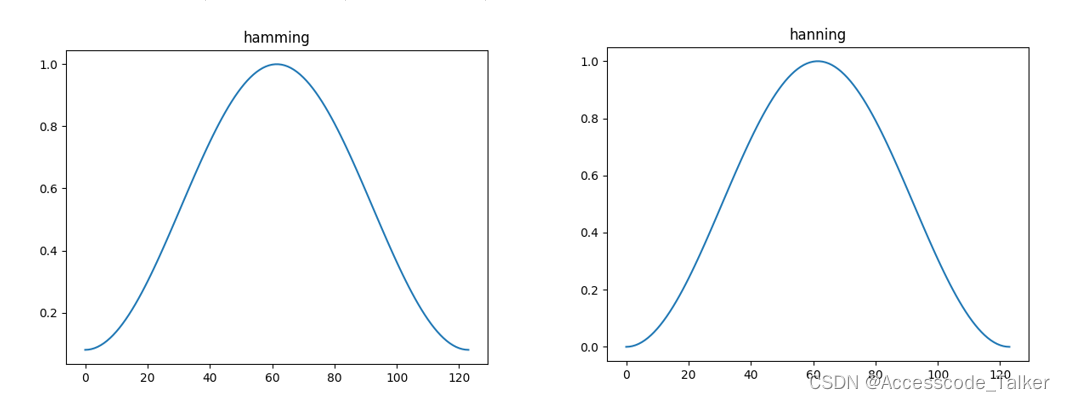
这里提一嘴汉明窗:☞内容参考
在ISO12233:2017标准中使用的是汉明窗,而ISO12233:2023标准中使用的是海宁窗
区别参见下图
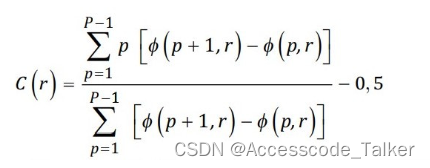
3.2,计算每一行的边缘位置
每一行的边缘位置即为一阶导数的矩心
贴图公式简化为:
c
(
r
)
=
∑
p
=
1
p
p
∗
d
i
f
f
(
p
,
r
)
∑
p
=
1
p
d
i
f
f
(
p
,
r
)
c(r)=\frac{ \sum_{p=1}^p p*diff(p,r)} {\sum_{p=1}^p diff(p,r)}
c(r)=∑p=1pdiff(p,r)∑p=1pp∗diff(p,r)
其中diff即为上面求的导数
设置两个列表x = [],y= []分别存入边缘点横坐标和纵坐标,这里我使用[-1/2,1/2]滤波+汉明窗。
接之前的代码:
kernel = np.array([-0.5,0.5])
x = []
y = []
for i in range(h):
single_row= img_lum[i].astype(int)#因为差分后会出现负数,所以将uint8转化为int
#diff_row = np.diff(single)
diff_row = np.convolve(single_row,kernel,mode="valid")#自定义的求导
hamming_window_1 = np.hamming(len(diff_row))#汉明窗
diff_row = diff_row*hamming_window_1#将每一行的数据进行汉明滤波
dt1 = np.sum(diff_row)
dt = result = np.sum(diff_row * (np.arange(len(diff_row))+1))#每个元素*(元素索引+1),因为索引从0开始所以需要+1
shift = dt/dt1
x.append(int(shift))
y.append(i)
x,y中存放的是所有边缘点的合集
3.3,综合每一行图像计算拟合边缘位置的斜率和截距
在获得x和y组成的坐标集合后,使用最小二乘法拟合直线
斜率
b
=
∑
i
=
1
n
(
x
[
i
]
−
a
v
e
r
a
g
e
(
x
)
)
∗
(
y
[
i
]
−
a
v
e
r
a
g
e
(
y
)
)
∑
i
=
1
n
(
x
[
i
]
−
a
v
e
r
a
g
e
(
x
)
)
2
斜率b = \frac{\sum_{i=1}^n (x[i]-average(x))*(y[i]-average(y))}{\sum_{i=1}^n(x[i]-average(x))^2}
斜率b=∑i=1n(x[i]−average(x))2∑i=1n(x[i]−average(x))∗(y[i]−average(y))
截距
a
=
a
v
e
r
a
g
e
(
y
)
−
b
∗
a
v
e
r
a
g
e
(
x
)
截距a=average(y) - b*average(x)
截距a=average(y)−b∗average(x)
python有现成的公式np.polyfit()☞函数参考
获得的直线代码及直线效果图,x,y为前面获取的点坐标合集
coefficients = np.polyfit(x, y, 1)#线的拟合
slope = coefficients[0]#斜率
intercept = coefficients[1]#截距
cv2.line(img,(0,int(intercept)),(int(-intercept/slope),0),(0,0,255),2)#这个方法在斜率为正时画出的线段将不可见
cv2.imshow("2",img)
cv2.waitKey(0)
红色为拟合直线:















 1550
1550











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









