






第一节:硬件连接
1.1、线缆连接框图

连接完成后,松下通信盒子应为如下显示:
其中,三位数码管,【左一】 =【-】【机器人与通信盒子未通信上】
【左3】=【循环缺口显示0】=【焊机与通信盒子已通信上】
【左2】=非报警状态固定显示

1.2、devicenet通信基本定义
共有5根线

注意1:GS6焊机的【通信接口装置】标准件,只有devicenet-5芯插座,没有插头及线缆,需根据机器人情况自制或订购。
注意2:GS6焊机的【通信接口装置】标准件,其上的devicenet模块需要额外供电,通过5芯插座受电供电。
注意3:fanuc机器人的devicenet板卡也需要额外供电。
注意4:如果【通信接口装置】的devicenet模块或机器人板卡未得到供电,则在机器人配置板卡时会报警:DNET-055 (或056、060、等)。
第二节:机器人设置
2.1、devicenet配置界面
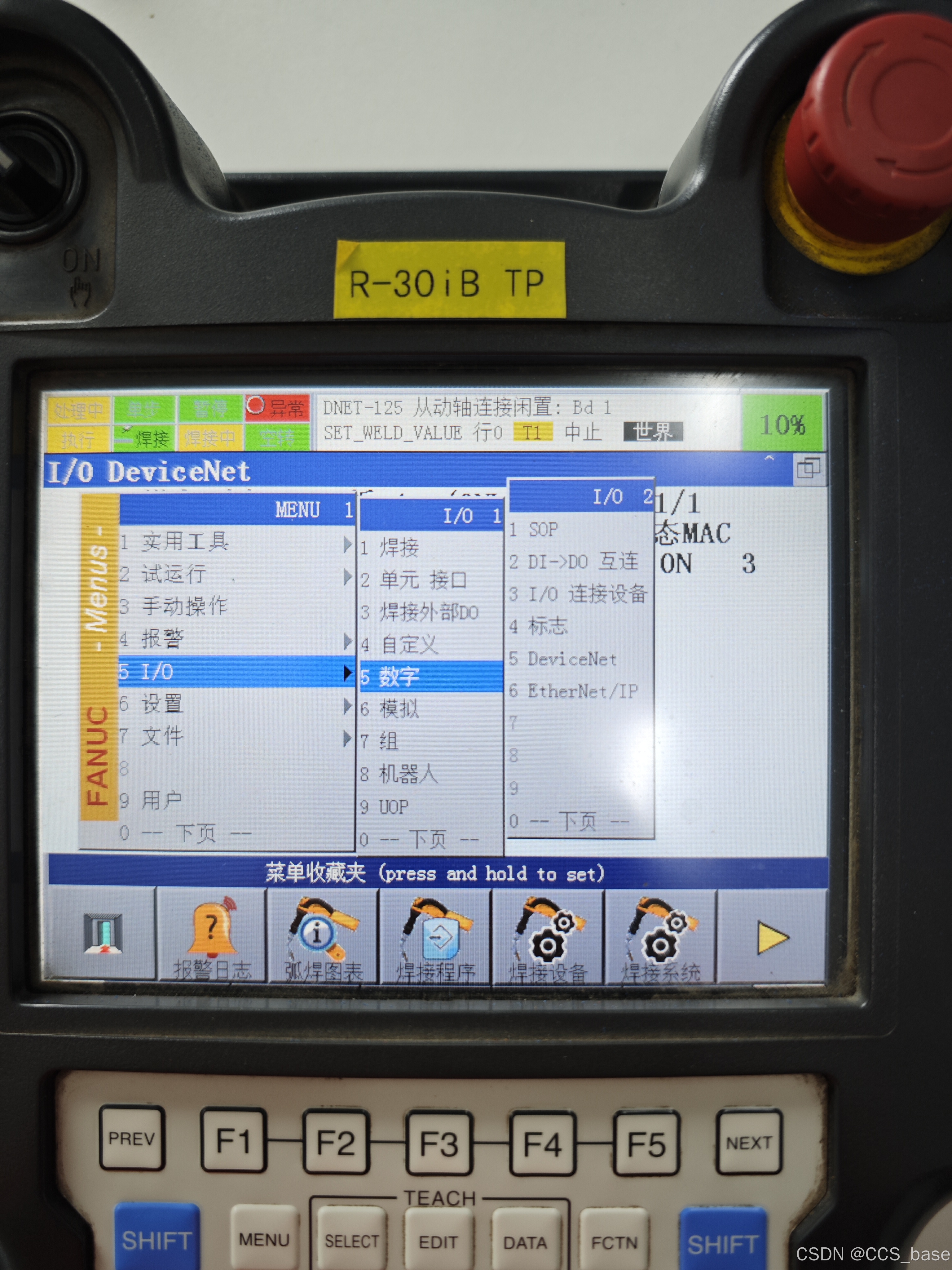
2.1.1:进入devicenet 配置界面
【menu】→【I/O】→【devicenet】

2.1.2:devicenet 配置界面介绍
共如下7个功能键:
【PREV】返回上一级(不能返回到主菜单);
【F1 类型】;返回主菜单
【F2 设备列 表】;该按钮切换{板列表}与{设备列表}两个界面。
【F3 定义设 备列表】;该按钮切换{定义设备列表}与{设备列表}两个界面。
【F4 详细】;进入下一级
【F5 帮助】;
【next 】下一页功能键
在{板列表}界面设置板卡,再在{定义设备列表}设置定义,最后在{设备列表}界面添加设备,即可让机器人与焊机实现数据交互。
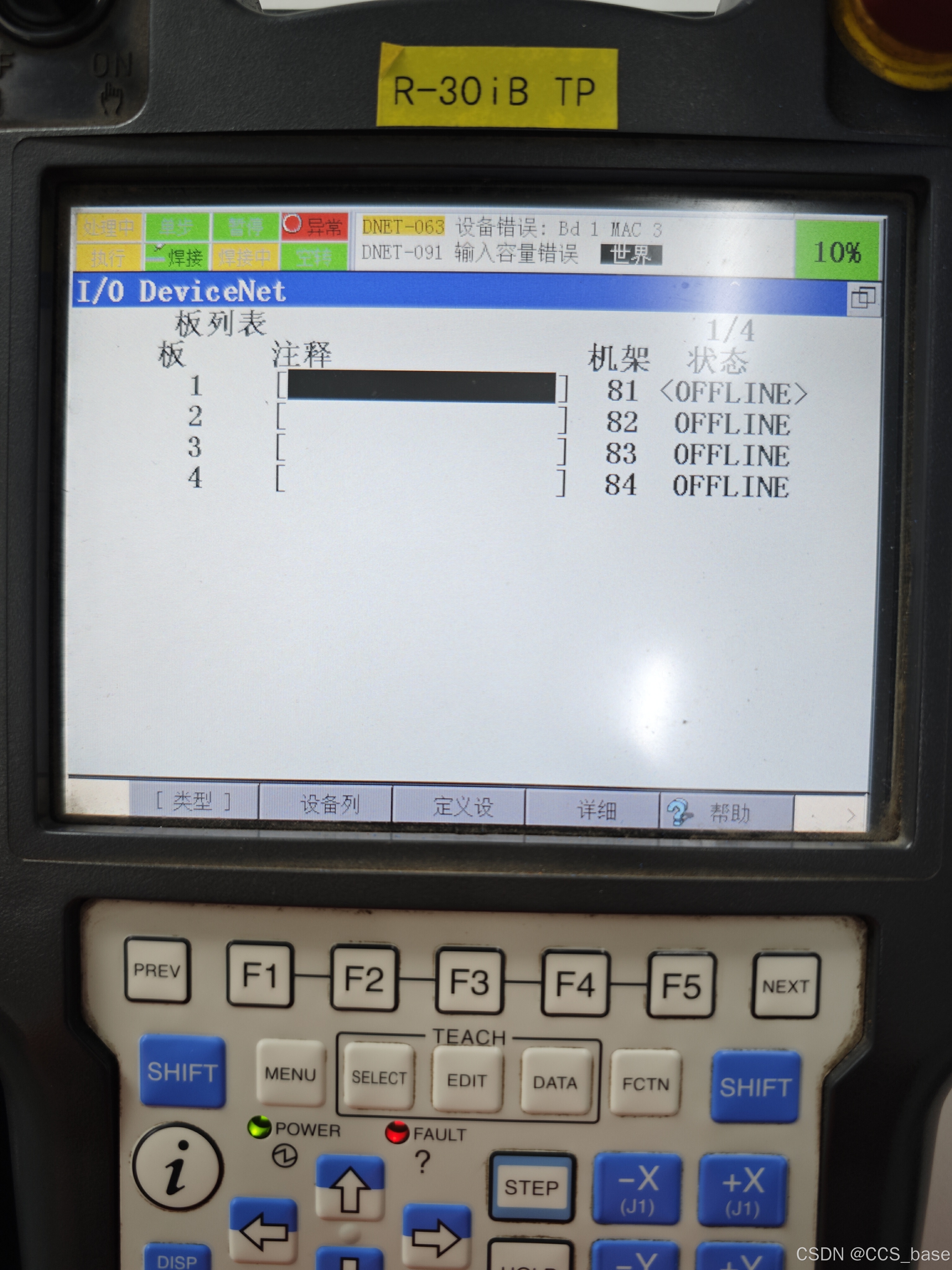
2.2、板列表-配置
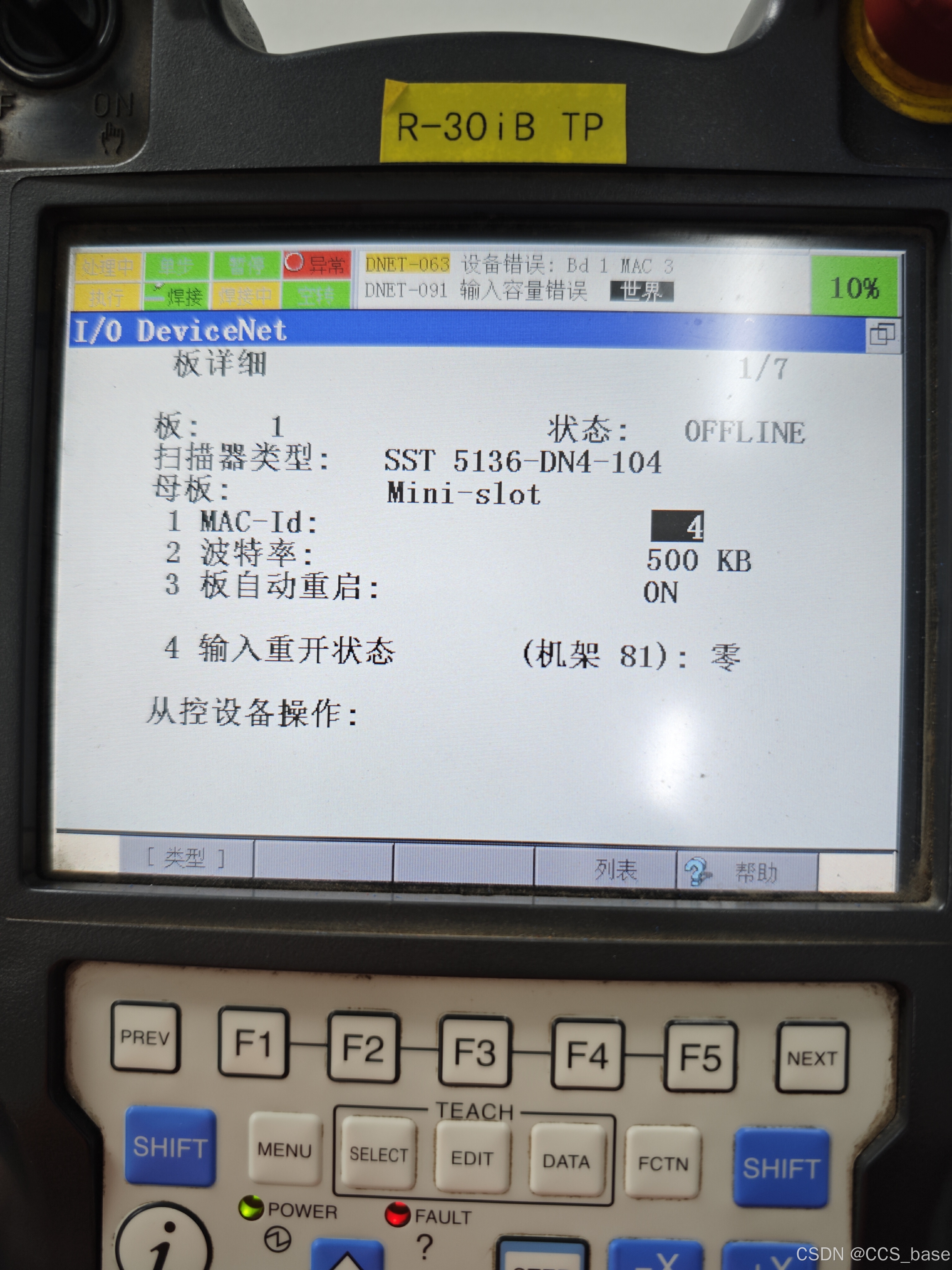
2.2.1 设置MDC-ID
在{板列表}界面按【详细】,把MAC-ID改为4(devicenet网络支持的MACID可为0~63,各节点MACID唯一且不同。本【通信接口装置】的MAC-ID默认为3,可通过拨码盘修改。母板的MAC-ID只要不与【通信接口装置】一样即可)
2.2.2 设置波特率
本【通信接口装置】的波特率可根据主站(即机器人devicenet母板)的设置自适应。当焊机上电、首次成功与机器人数据交互时,决定波特率。此后机器人端修改,焊机重启即跟随修改。
2.2.3 设置收发字节数
该项取决于【通信接口装置】,说明书中有详细的bit位描述。
【5 来自主控设备的输出大小】即机器人对焊机发送:18字节
【6 向主控设备的输入大小】即焊机对机器人发送:16字节
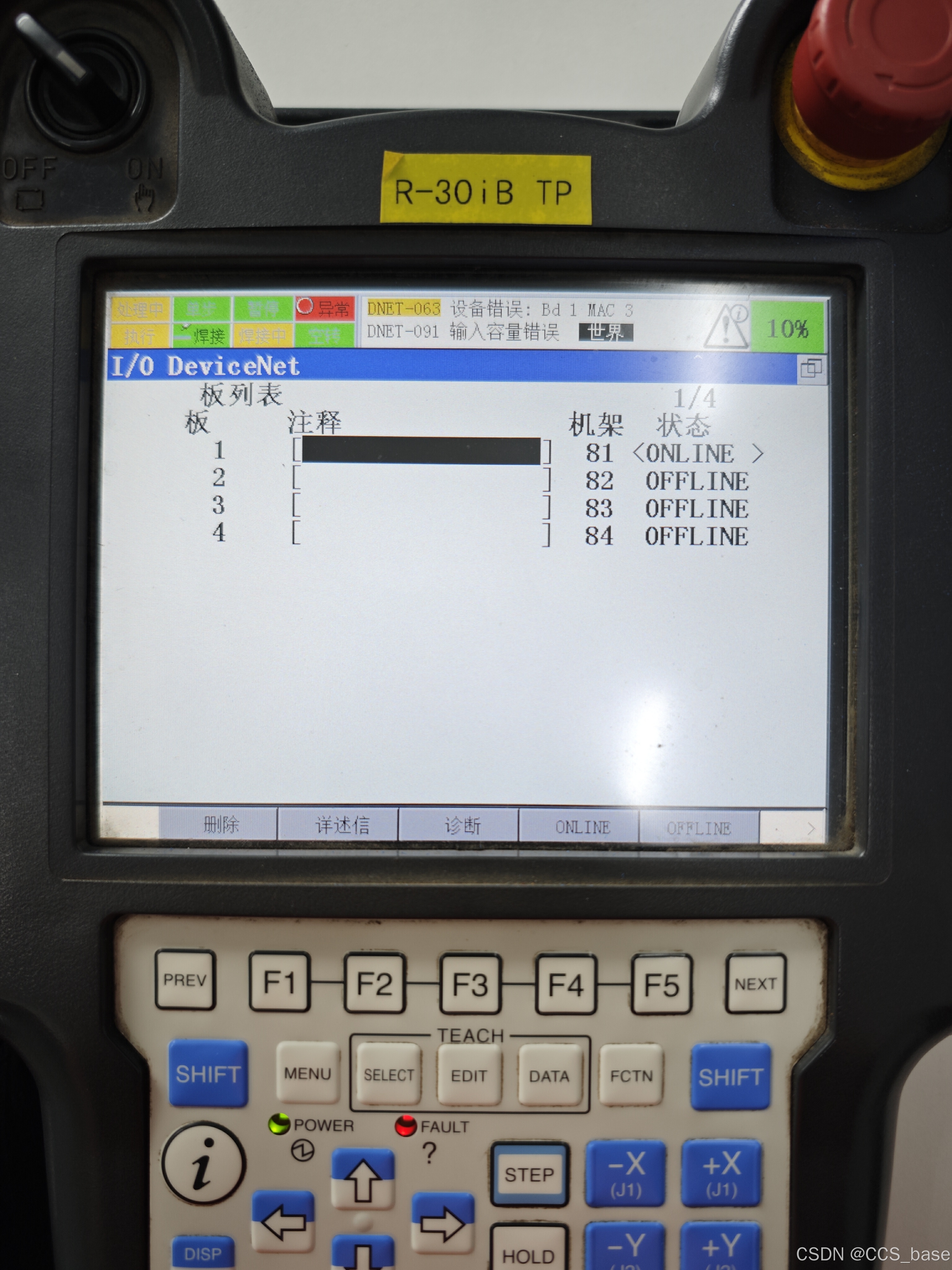
2.2.4 在devicenet网络上查找【通信接口装置】
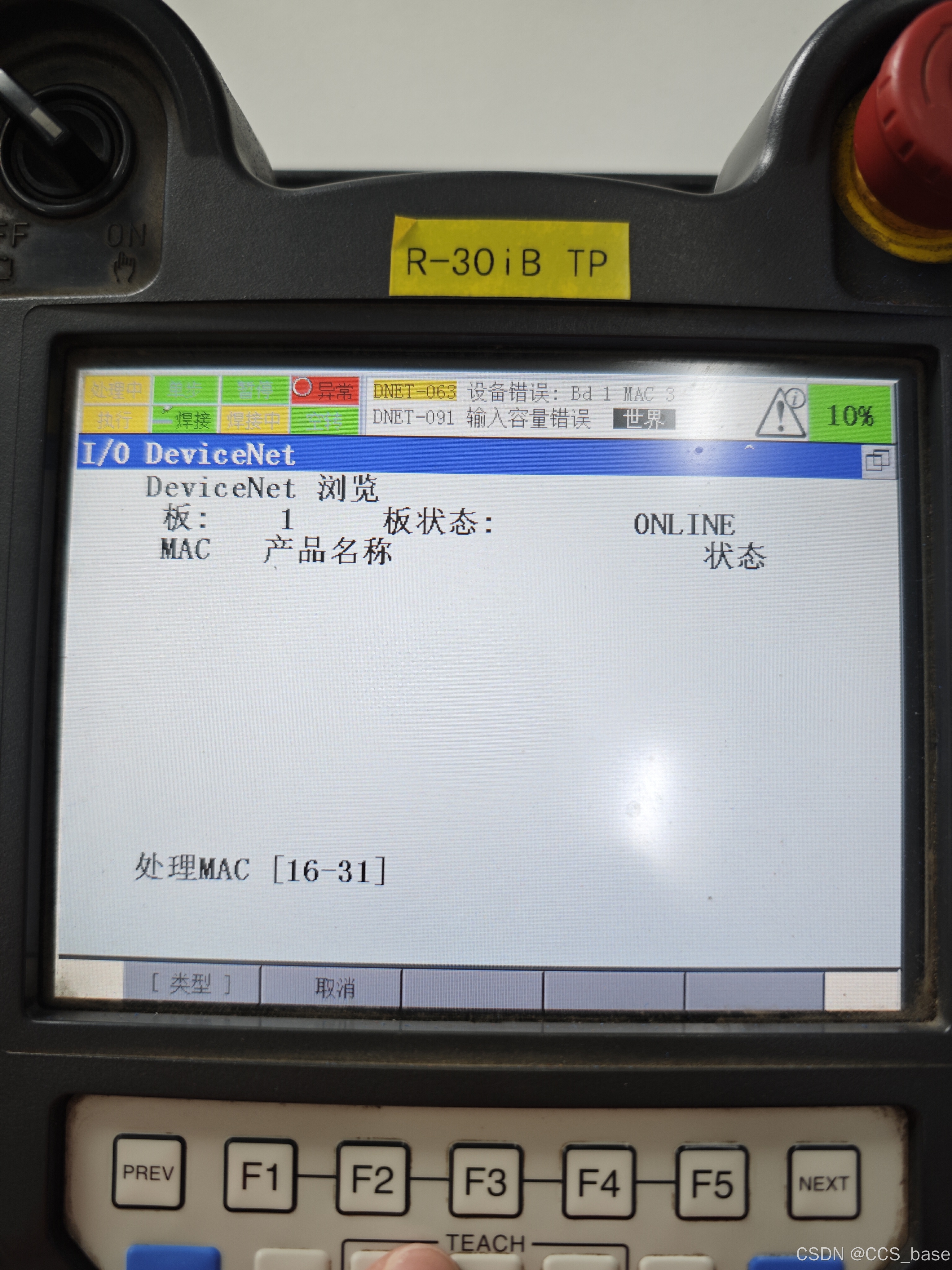
按【prev】、【F2】回到{板列表},按【F4 ONLINE】板状态设置为【ONLINE】;
按【F3 诊断】,进入devicenet 诊断板设置界面;
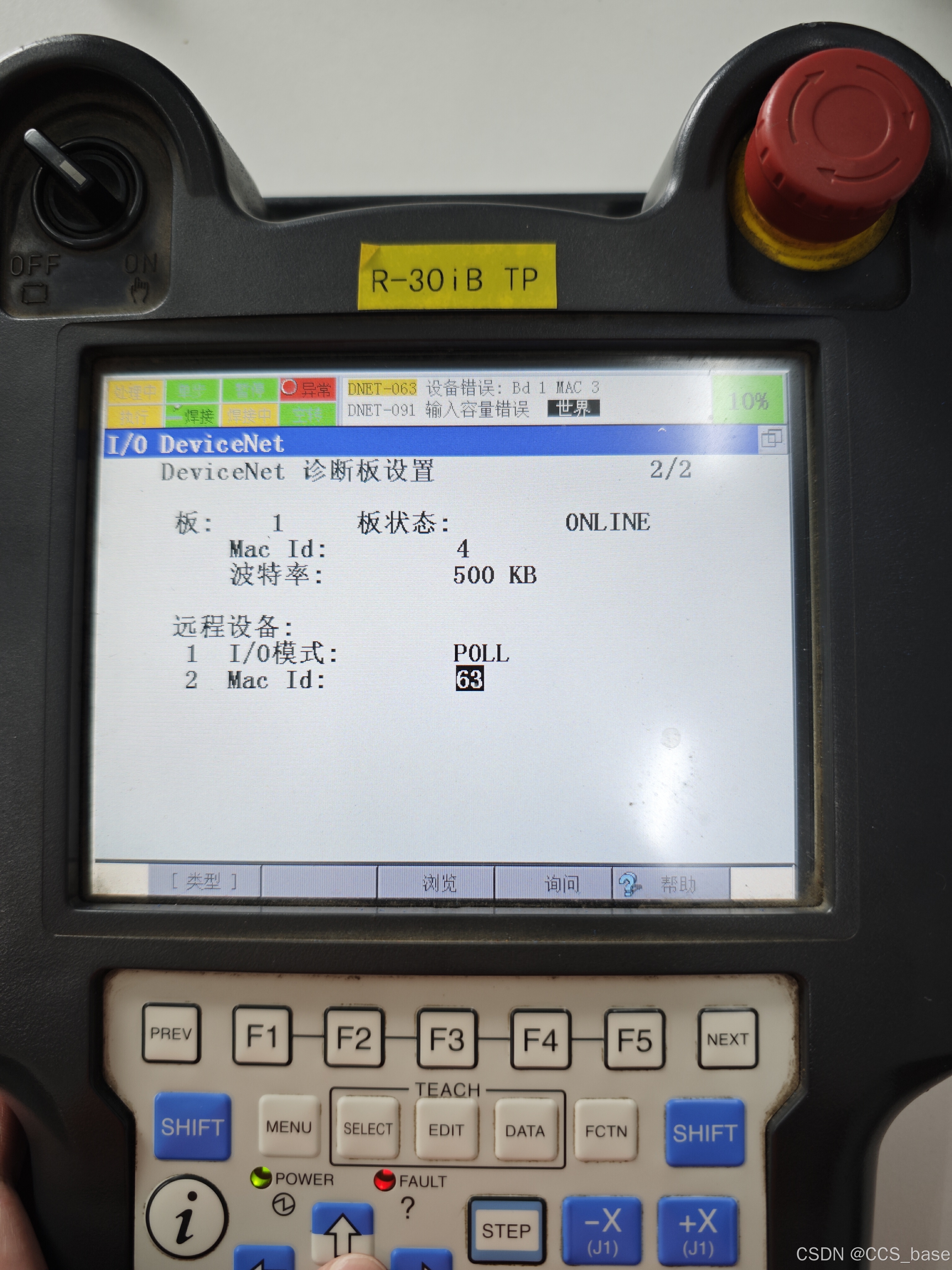
按【F3 浏览】,等待一段时间后,显示devicenet网络中在线的所有设备。此处可以看到MACID=3的设备,即【通信接口装置】
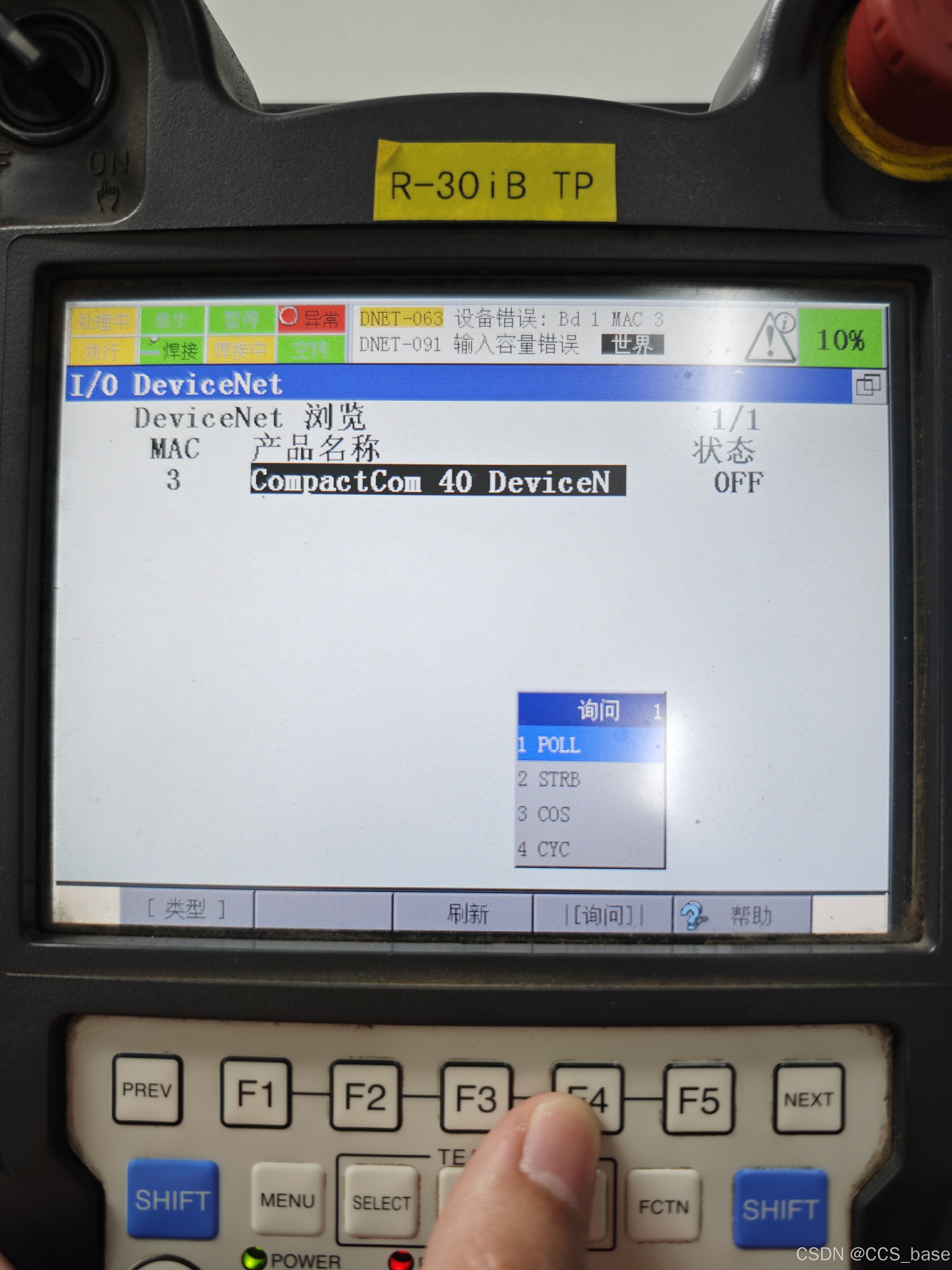
按【F4 询问】,弹窗显示4种询问方式,直接再按【F4】选择POLL,显示此设备的详细信息。下图显示,有MAC-ID=3的设备,设备名称=CompactCom 40 D...
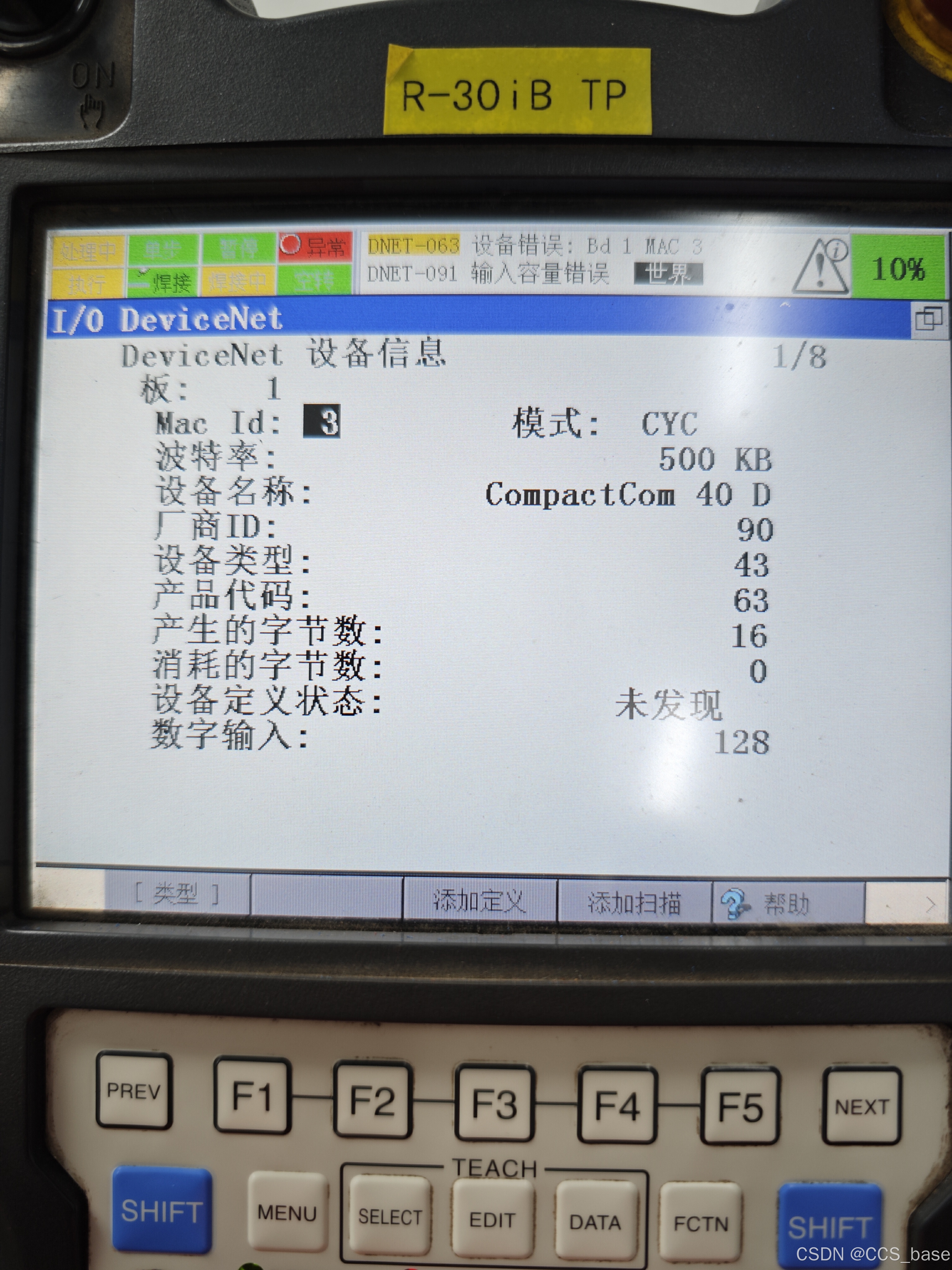
按【F3 添加定义】,即可将该设备的信息添加到{定义设备列表}
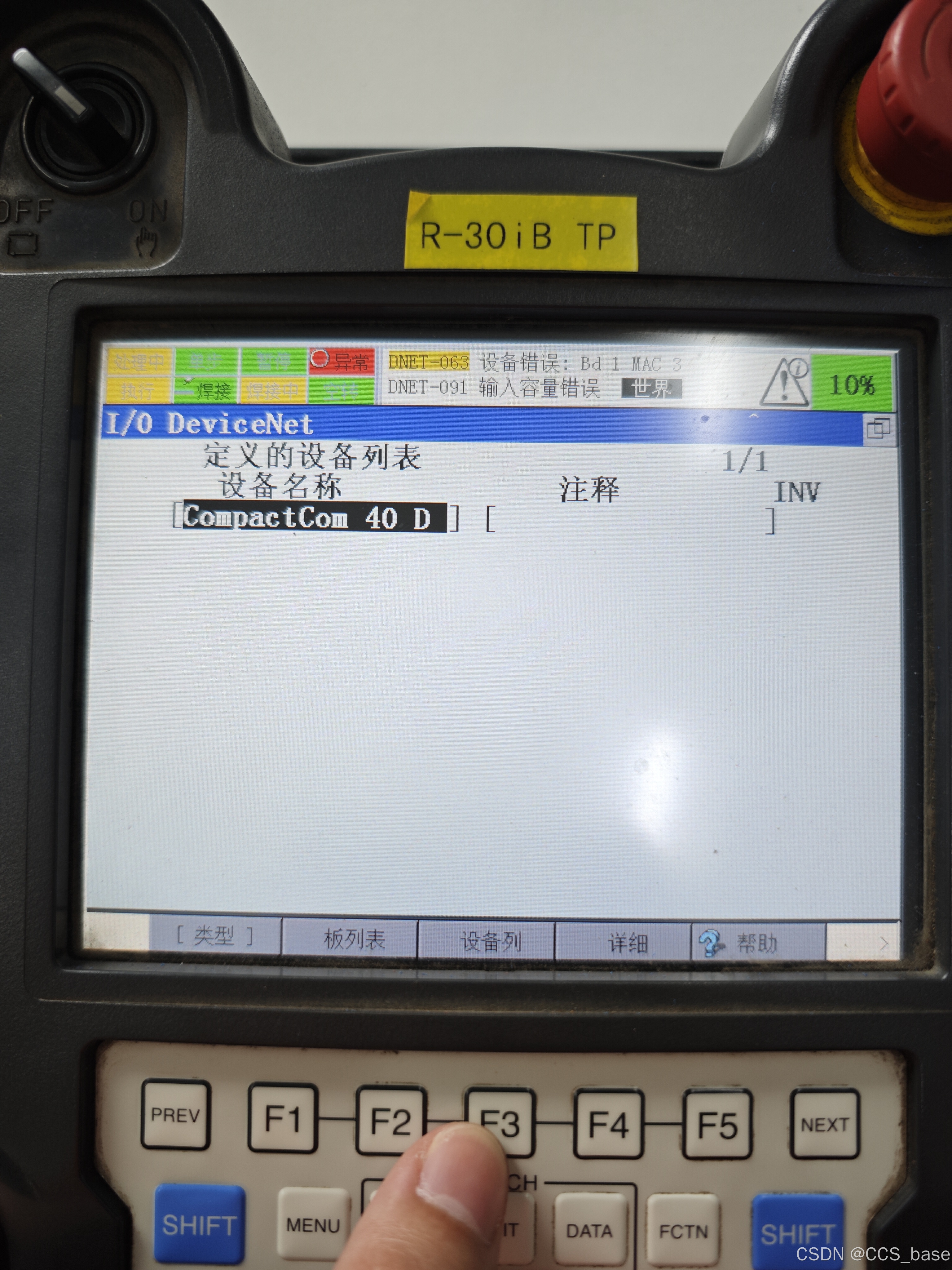
2.3、定义设备列表-配置
按【prev】、【F3】到{设备定义列表},可以看到一个新的定义“CompactCom 40 D”,可修改名字为“SX_GS6”
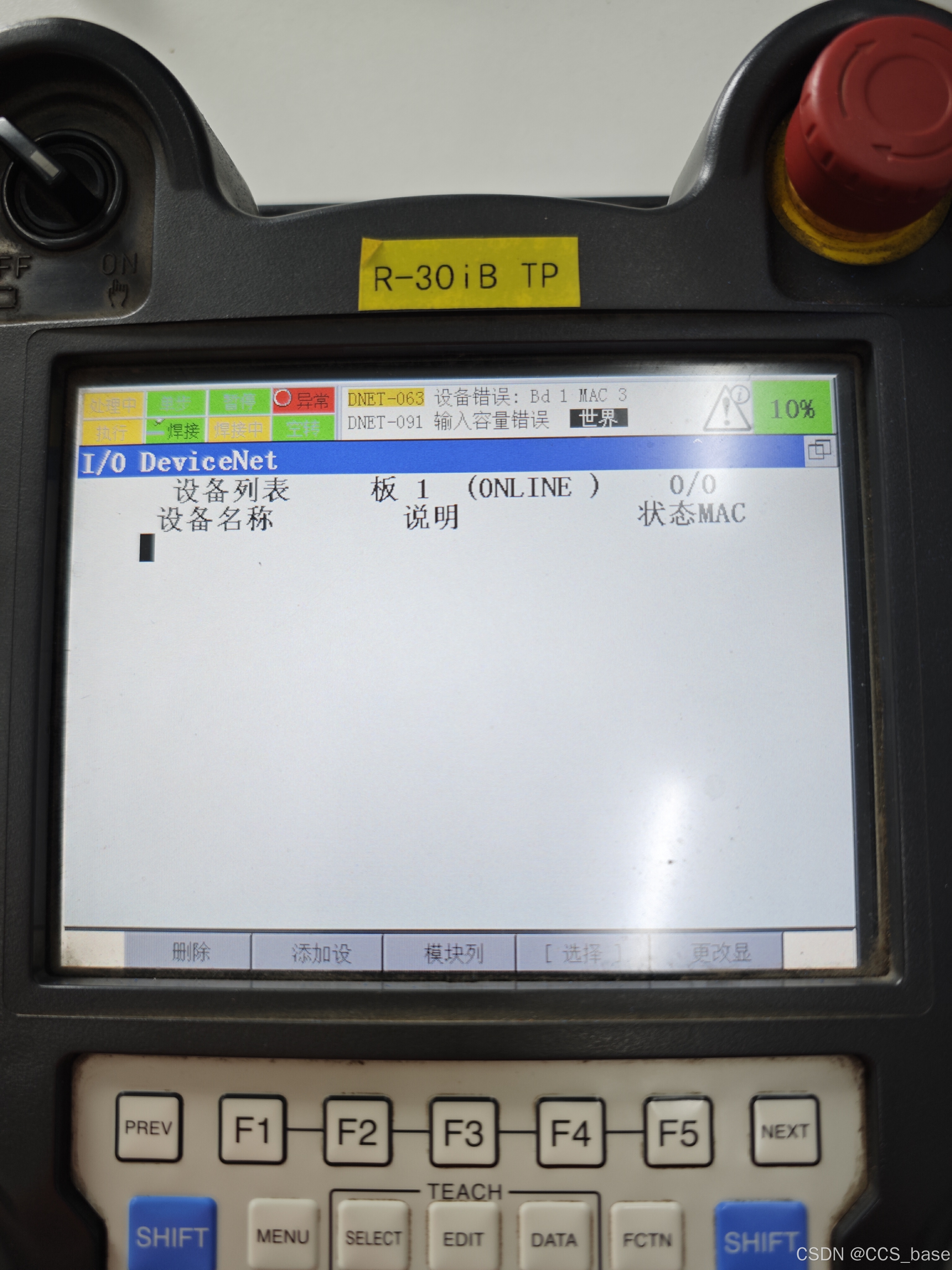
2.4、设备列表-配置
按【prev】、【F3】到{设备列表},
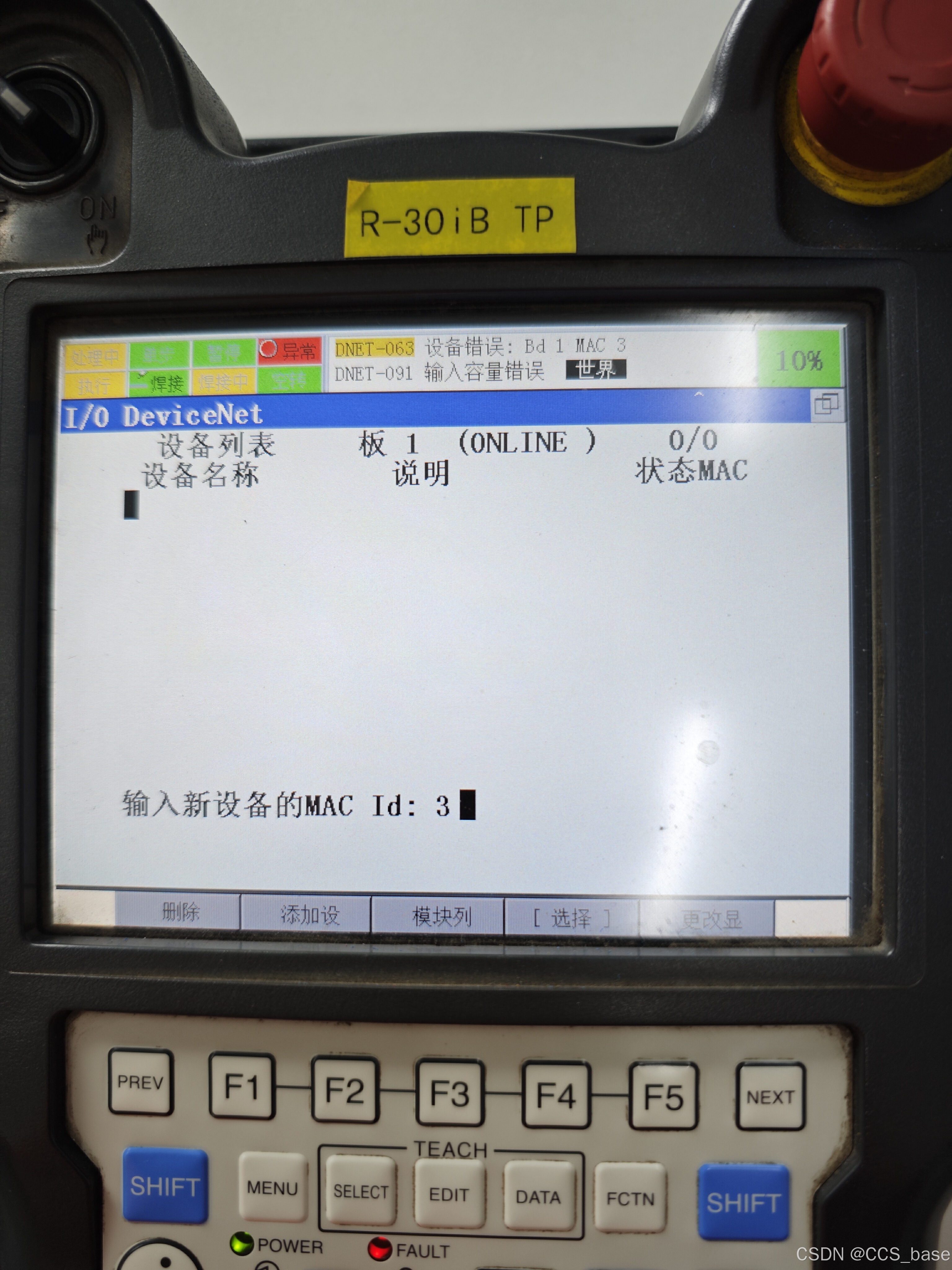
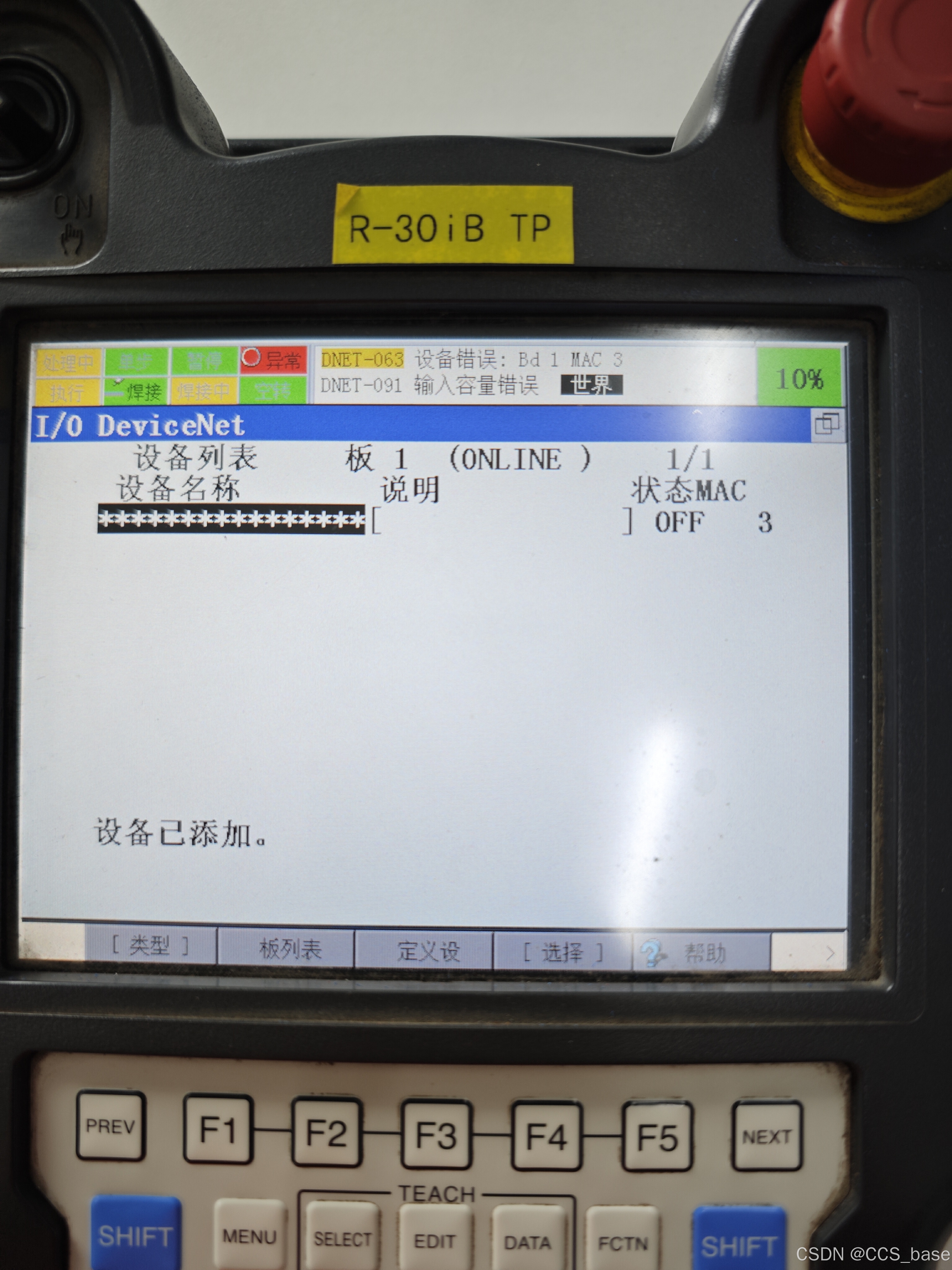
再按【F2 添加设 备】,需要输入MACID=3。随即显示【设备已添加】
按【F4 选择】,随即显示【设备定义选择清单】
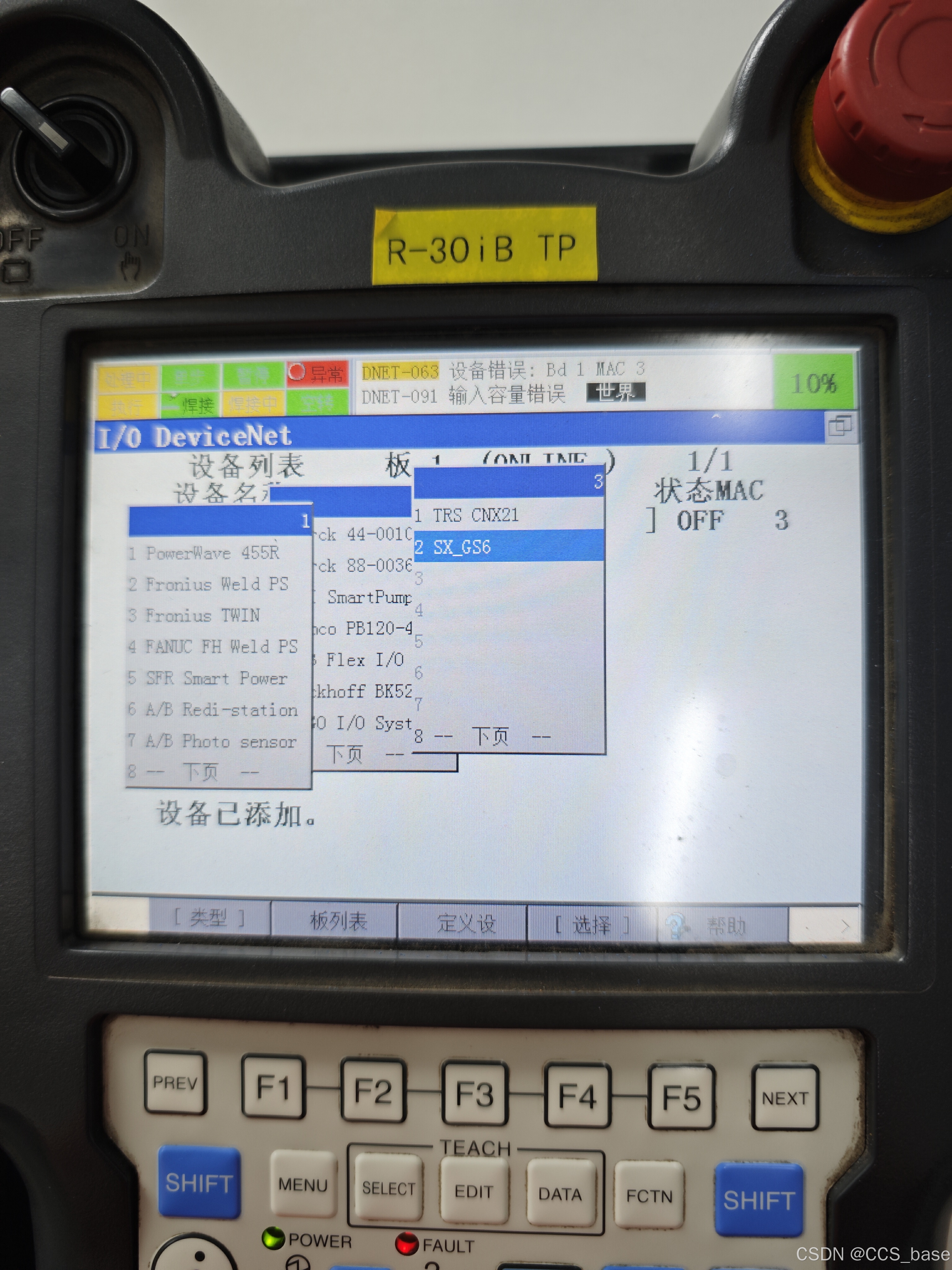
选择【SX_GS6】,随即显示需要重启
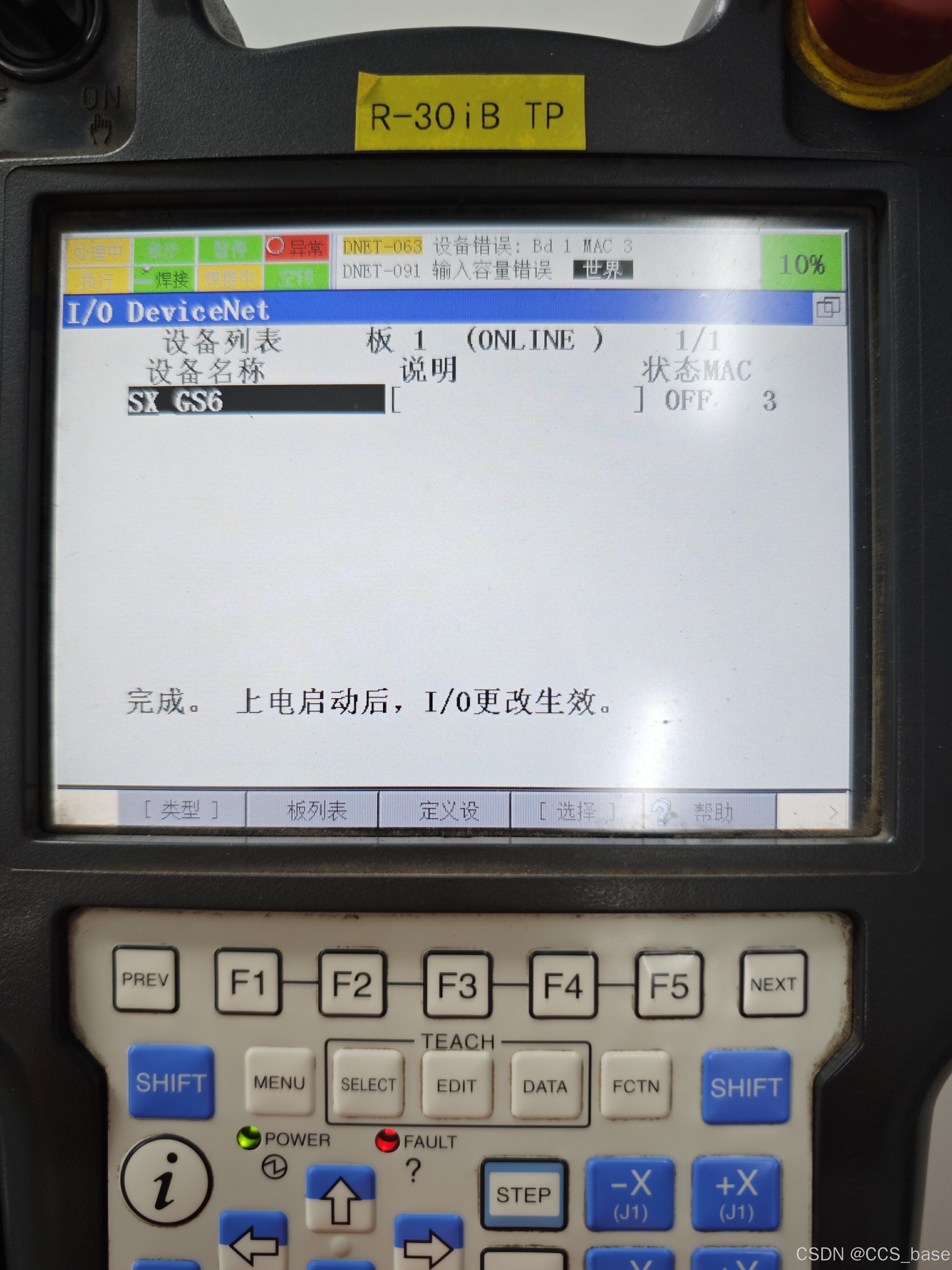
重启后,再次到此界面,将状态改为【ON】。如果【通信接口装置】的数码管为如下显示,即完成设备配置。(报警E83=机器人为准备好)

2.5、IO分配
按【MENU】→【I/O】→【数字】,进入数字IO分配及修改界面。【F1 】切换分配界面与修改界面,【F2】切换DI与DO界面。
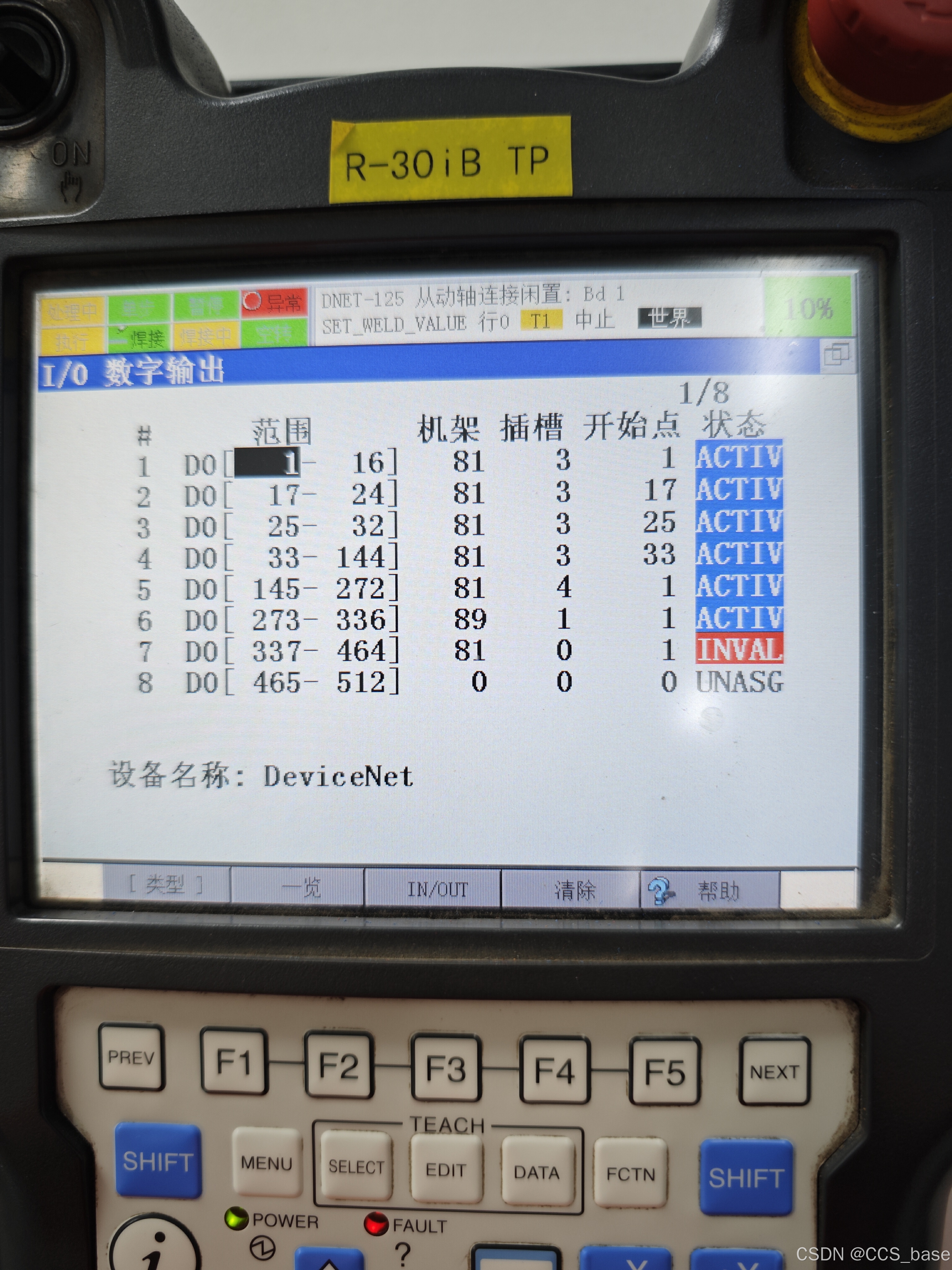
数字IO分配的目的是,将数字IO的地址与通信数据地址对应起来,使【机架.插槽.开始点=范围】。机器人拥有512个数字IO,通信接口装置 接收数据 的 有效地址 数量=18字节=144bit,实际上有很多位是保留/用不上的。可以跳跃式分配以节约数字IO
以{数字输出}分配界面为例,【范围】=DO地址;机架=devicenet模块的物理地址;插槽3=macID;开始点=【范围】内DO地址的第一位 对应 发送数据(共144位)的第几位。
注意:一个DO只能对应一个发送数据的地址,但多个DO可以对应同一个地址,且关系为“与”。
注意:DO修改后,机器人重启方有效。
2.6、测试IO功能
按【F2】切换到{DO修改界面}
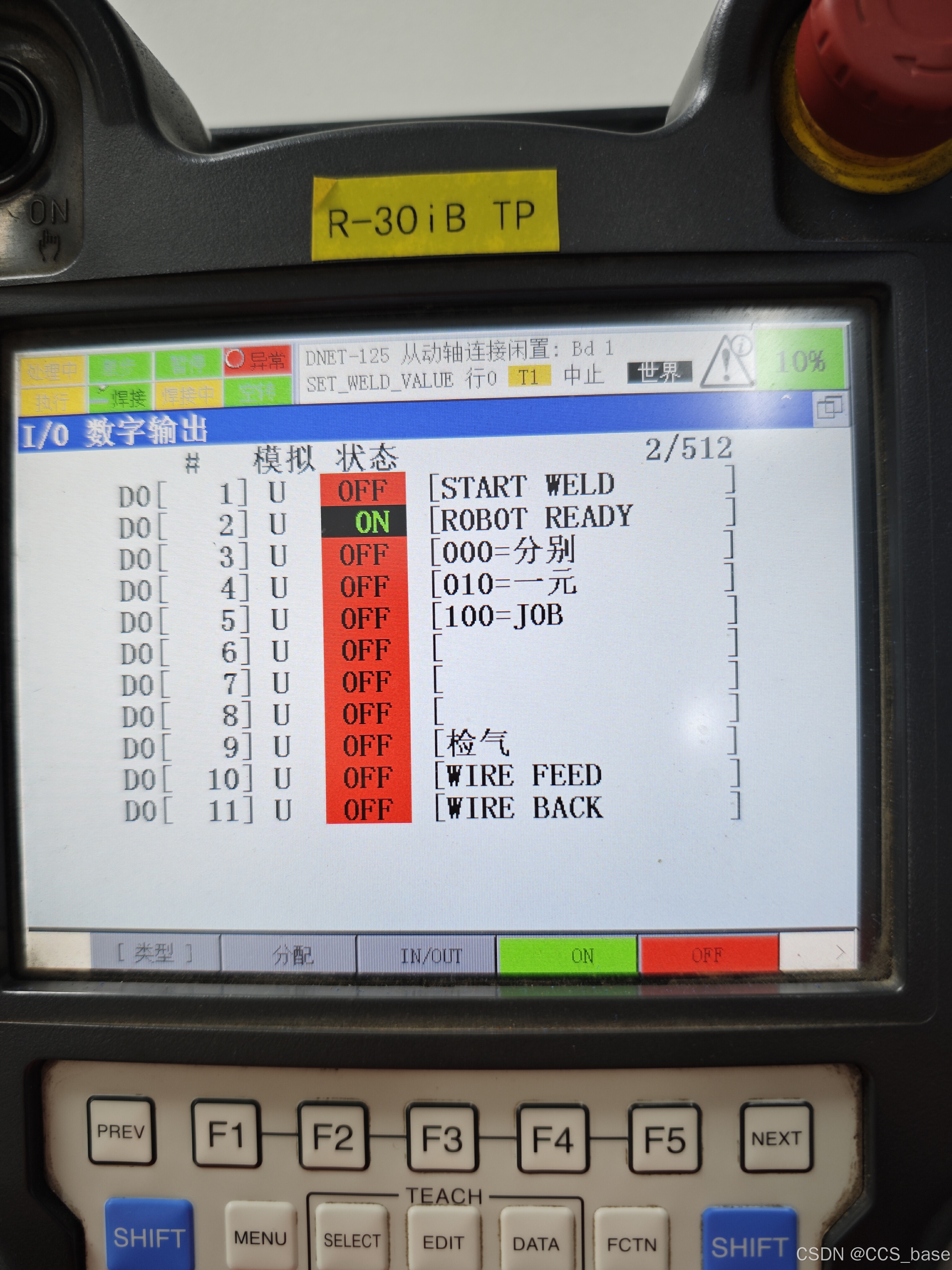
根据 通信接口装置的说明书上的通信协议,(2/144)=机器人就绪信号,将DO2置OFF后,通信接口装置的数码管显示如下,即焊机与机器人之间成功通信。

第三节:机器人程序调用IO实现焊接
3.1、程序
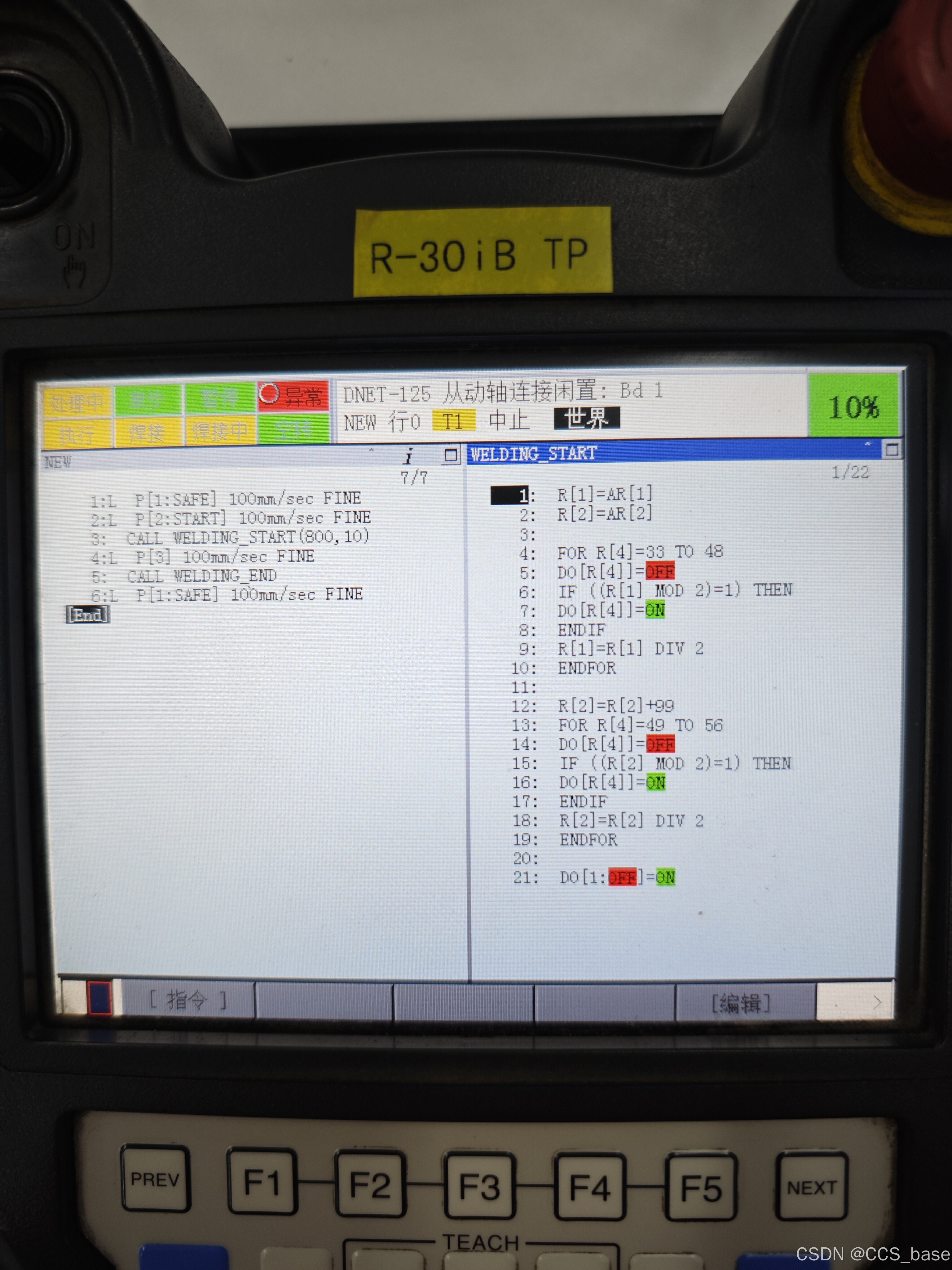
左侧主程序 NEW(),通过CALL指令调用子程序WELDING_START(),且在CALL指令调用时,增加形式参数(800,10)。即AR[1]=800;AR[2]=10
右侧子程序WELDING_START(),行1~2把形参(800,10)赋值到变量R[1],R[2]。
由于发送的DO33~48为焊接电流,且1bit=0.1A,所以 电流=80A=800=0B11,0010,0000
通过行4~10,反复把变量R[1]除2求余后,输入到对应的DO中,即可实现主程序调用带形参函数开始焊接的效果。
电压设置为一元化模式,bit0~198=-9.9V~+9.9V,所以电压=+1.0V=10=0B1010
通过行12~19,R[2]先加99,再反复除2求余后,输入到对应的DO中,即可实现主程序调用带形参函数开始焊接,且带电压微调的效果。
注意:调用带形参,子程序可以不使用形参(即AR);但子程序执行带形参(带AR)的代码行时,如未经过主程序带形参的调用会报错。


















 1783
1783

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









