






 文章详细介绍了Pytorch中的卷积操作,包括nn.Conv2d类和nn.functional.conv2d函数的使用,以及它们的源码分析。同时,通过矩阵乘法手动实现了卷积和转置卷积,以加深理解,并进行了结果验证。
文章详细介绍了Pytorch中的卷积操作,包括nn.Conv2d类和nn.functional.conv2d函数的使用,以及它们的源码分析。同时,通过矩阵乘法手动实现了卷积和转置卷积,以加深理解,并进行了结果验证。
这里是一份学习笔记…
学习视频点这里🔗
内容概述:
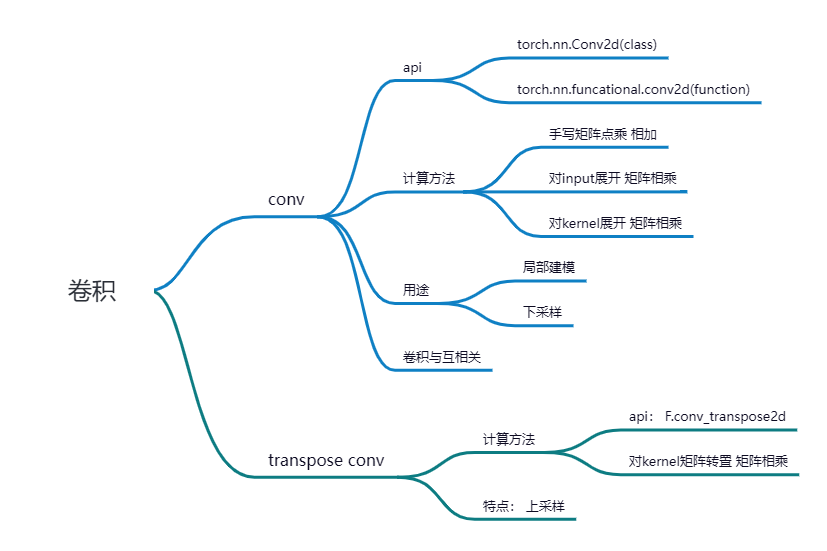
1-Pytorch中conv2d API
Pytorch包含连个conv2dAPI:
- torch.nn.Conv2d,这是一个class,需要实例化后使用,会自动创建权重weight和偏置bias;
- torch.nn.funcational.conv2d,这是一个函数,不需要实例化,需要手动传入权重weight和偏置bias;
- 注:torch.nn.Conv2d的底层调用的就是torch.nn.funcational.conv2d,torch.nn.funcational.conv2d的接口由C++实现;
1.1 用法
1.1.1 torch.nn.Conv2d
接口及参数:
torch.nn.Conv2d(
in_channels,
out_channels,
kernel_size, # 整数或元组
stride=1,
padding=0, # valid/same
dilation=1, # 空洞 空洞卷积
groups=1, # 通道分组 分组卷积 计算量下降
bias=True, # 偏置
padding_mode='zeros',
device=None,
dtype=None
)
调用:
import torch
import torch.nn as nn
import torch.nn.functional as F
in_channels = 1
out_channels = 1
kernel_size = 3
bias = False
batch_size = 1
input_size = [batch_size,in_channels, 4 ,4]
# 普普通通的一个卷积
conv_layer = torch.nn.Conv2d(
in_channels,
out_channels,
kernel_size,
bias = bias
)
# 随机产生一个input
input = torch.randn(input_size)
output = conv_layer(input)
# print(conv_layer.weight)
# print(conv_layer.weight.size())
1.1.2 torch.nn.funcational.conv2d
接口及参数:
torch.nn.functional.conv2d(
input,
weight,
bias=None,
stride=1,
padding=0,
dilation=1,
groups=1
)
调用:
filters = torch.randn(8, 4, 3, 3)
inputs = torch.randn(1, 4, 5, 5)
F.conv2d(inputs, filters, padding=1)
1.2 源码
1.2.1 torch.nn.Conv2d源码
# 继承自ConvNd类
from .. import functional as F
class Conv2d(_ConvNd):
def __init__(...)
def _conv_forward(self, input: Tensor, weight: Tensor, bias: Optional[Tensor]):
if self.padding_mode != 'zeros':
return F.conv2d(F.pad(input, self._reversed_padding_repeated_twice, mode=self.padding_mode),
weight, bias, self.stride,
_pair(0), self.dilation, self.groups)
# 调用对应functional
return F.conv2d(input, weight, bias, self.stride,
self.padding, self.dilation, self.groups)
def forward(self, input: Tensor) -> Tensor:
return self._conv_forward(input, self.weight, self.bias)
1.2.2 torch.nn.functional.conv2d源码
torch.nn.functional.conv2d源代码?
功能代码都是用C++实现的。conv2d的C++ pytorch代码的入口点是here;
2-Pytorch手写实现conv2d
2.1 用矩阵乘法实现conv2d
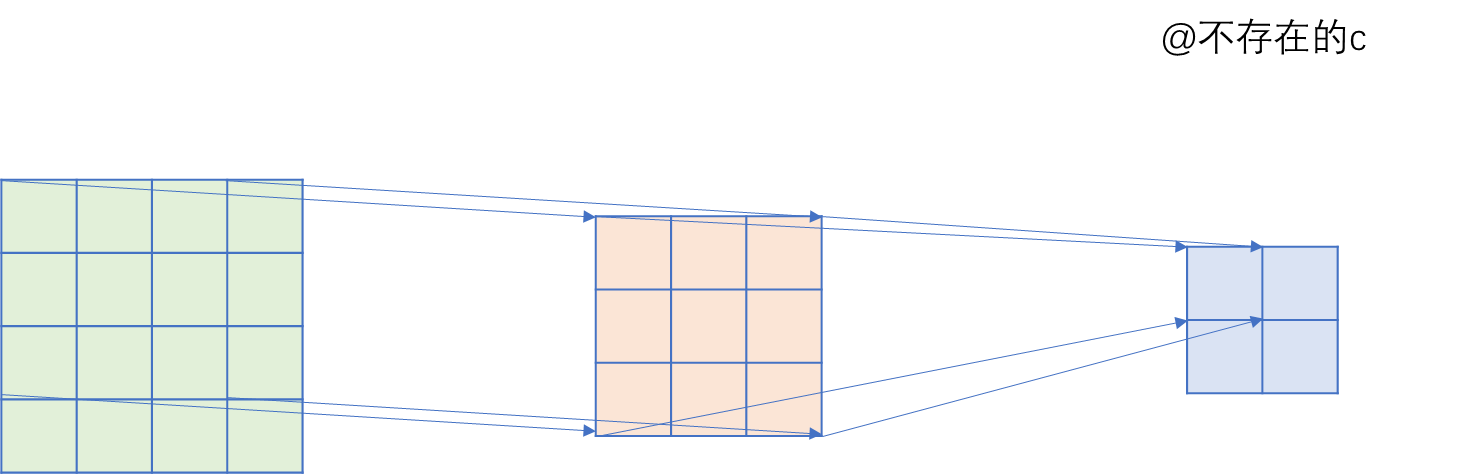
2.1.1 不考虑batch_size, channel维度
手动实现图1的卷积:
# 实现 不考虑batch_size维度与channels维度
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
input = torch.randn(5, 5)
kernel = torch.randn(3, 3)
bias = torch.randn(1)
# 用矩阵运算实现二维卷积
def matrix_multiplication_for_conv2d(input, kernel,bias = 0, stride=1, padding=0):
if padding > 0:
input = F.pad(input, (padding, padding, padding, padding))
# 计算输出大小
input_h, input_w = input.shape
kernel_h, kernel_w = kernel.shape
output_h = (math.floor((input_h - kernel_h) / stride) + 1)
output_w = (math.floor((input_w - kernel_w) / stride) + 1)
# 初始化输出矩阵
output = torch.zeros(output_h, output_w)
for i in range(0, input_h - kernel_h + 1, stride):
for j in range(0, input_w - kernel_w + 1, stride):
region = input[i:i + kernel_h, j: j+kernel_w]
# 点乘相加
output[int(i/stride), int(j/stride)] = torch.sum(region * kernel) + bias
return output
# 调用自己写的函数
res = matrix_multiplication_for_conv2d(input, kernel,bias = bias, padding=1)
print(res)
# 验证一下
# 调用API结果
res2 = F.conv2d(
input.reshape((1, 1, input.shape[0], input.shape[1])),
kernel.reshape((1,1,kernel.shape[0], kernel.shape[1])),
padding=1,
bias=bias
)
print(res2)
# True
print(torch.allclose(res, res2))
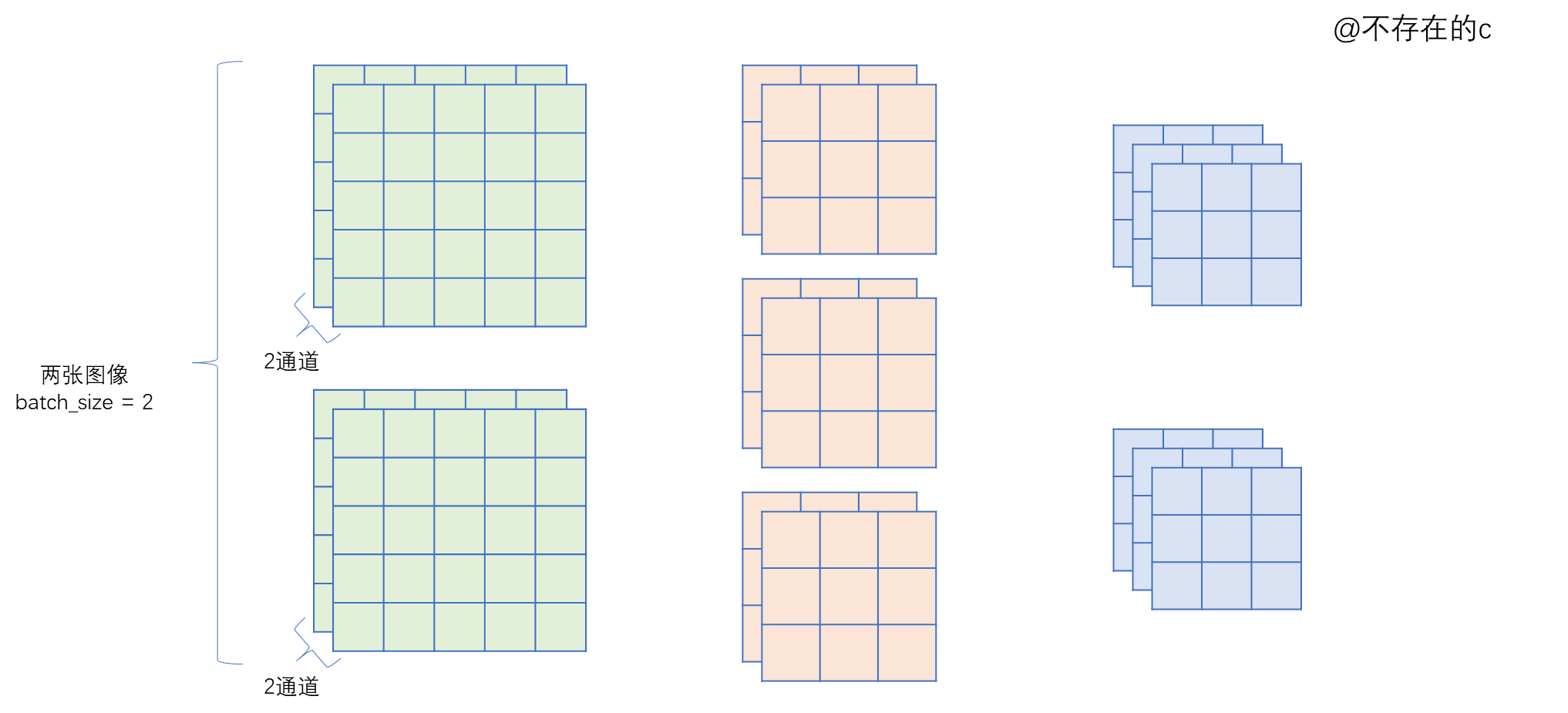
2.1.2 考虑batch_size, channel维度
# 实现 不考虑batch_size维度与channels维度
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
# bs*in_channel*in_h*in_w
input = torch.randn(2, 2, 5, 5)
# out_channel*inchannel*kernel_h*kernel*w
kernel = torch.randn(3, 2, 3, 3)
bias = torch.randn(3)
# 用矩阵运算实现二维卷积 考虑batch_size和channels维度
def matrix_multiplication_for_conv2d(input, kernel,bias = 0, stride=1, padding=0):
if padding > 0:
input = F.pad(input, (padding, padding, padding, padding, 0, 0, 0, 0))
# 计算输出大小
bs, in_channels, input_h, input_w = input.shape
out_channel, in_channel, kernel_h, kernel_w = kernel.shape
if bias is None:
bias = torch.zeros(out_channel)
output_h = (math.floor((input_h - kernel_h) / stride) + 1)
output_w = (math.floor((input_w - kernel_w) / stride) + 1)
# 初始化输出矩阵
output = torch.zeros(bs, out_channel, output_h, output_w)
# 不考虑性能
for ind in range(bs):
for oc in range(out_channel):
for ic in range(in_channel):
for i in range(0, input_h - kernel_h + 1, stride):
for j in range(0, input_w - kernel_w + 1, stride):
region = input[ind, ic, i:i + kernel_h, j: j + kernel_w]
# 点乘相加
output[ind, oc, int(i / stride), int(j / stride)] += torch.sum(region * kernel[oc, ic])
output[ind, oc] += bias[oc]
return output
res = matrix_multiplication_for_conv2d(input, kernel, bias = bias, padding=1, stride=2)
print(res)
# 验证一下
# 调用API结果
res2 = F.conv2d(
input,
kernel,
padding=1,
bias=bias,
stride=2
)
print(res2)
print(torch.allclose(res, res2))
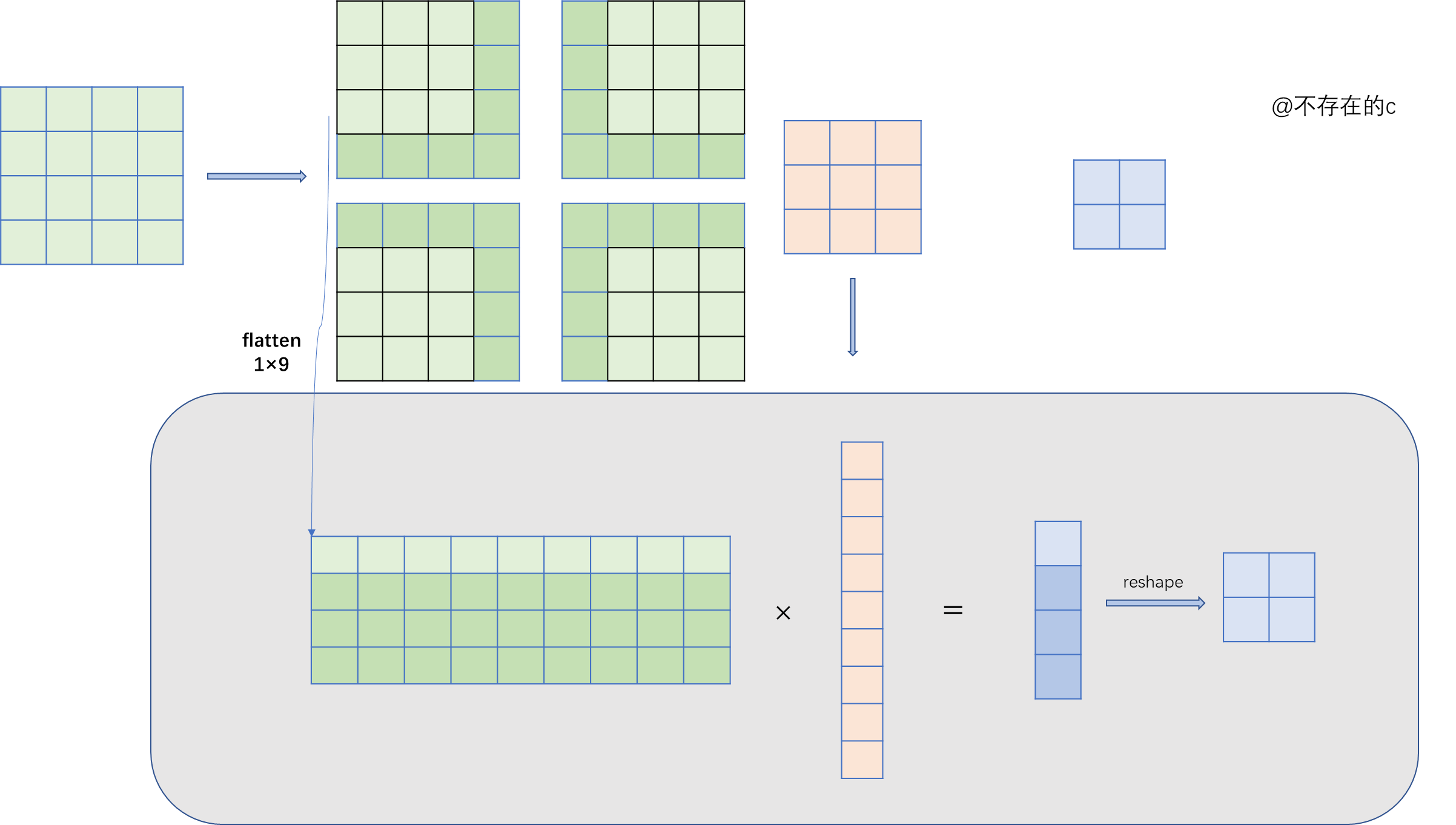
2.2 对input展开成矩阵 实现conv2d
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
input = torch.randn(5, 5)
kernel = torch.randn(3, 3)
bias = torch.randn(1)
# 用矩阵运算实现二维卷积 input flatten版
def matrix_multiplication_for_conv2d_flatten(input, kernel,bias = 0, stride=1, padding=0):
if padding > 0:
input = F.pad(input, (padding, padding, padding, padding))
# 计算输出大小
input_h, input_w = input.shape
kernel_h, kernel_w = kernel.shape
output_h = (math.floor((input_h - kernel_h) / stride) + 1)
output_w = (math.floor((input_w - kernel_w) / stride) + 1)
# 初始化输出矩阵
output = torch.zeros(output_h, output_w)
# 所有特征区域拉平后的向量
region_matrix = torch.zeros(output.numel(), kernel.numel())
# kernel向量形式
kernel_matrix = kernel.reshape((kernel.numel(), 1))
row_index = 0
for i in range(0, input_h - kernel_h + 1, stride):
for j in range(0, input_w - kernel_w + 1, stride):
region = input[i:i + kernel_h, j: j+kernel_w]
# 区域拉平成向量
region_vector = torch.flatten(region)
# 赋值
region_matrix[row_index] = region_vector
row_index += 1
# 矩阵惩罚
output_matrix = region_matrix @ kernel_matrix
output = output_matrix.reshape((output_h, output_w)) + bias
return output
# 调用自己实现的函数
res = matrix_multiplication_for_conv2d_flatten(input, kernel,bias = bias, padding=1, stride=2)
print(res)
# 验证一下
# 调用API结果
res2 = F.conv2d(
input.reshape((1, 1, input.shape[0], input.shape[1])),
kernel.reshape((1, 1, kernel.shape[0], kernel.shape[1])),
padding=1,
bias=bias,
stride=2
).squeeze(0).squeeze(0)
print(res2)
print(torch.allclose(res, res2))
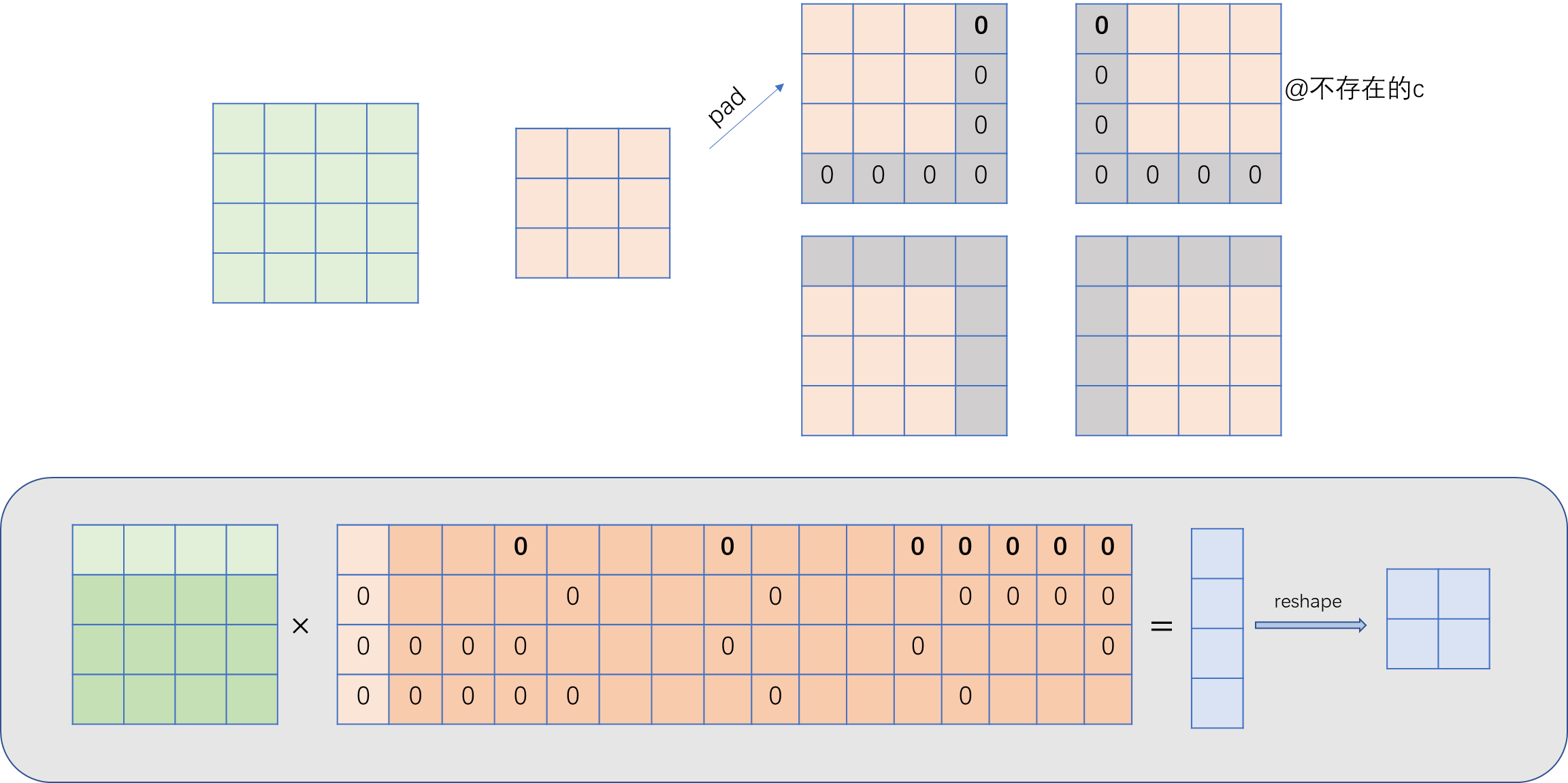
2.3 对kernel展开成矩阵 实现conv2d
# 实现 不考虑batch_size维度与channels维度
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
# 通过对kernel进行展开来实现二维卷积 并推导出转置卷积
# 不考虑batch_size, channel维度
# padding = 1 stride = 1
# 基于kernel和输入特征图大小得到填充拉直后的kernel堆叠的矩阵
def get_kernel_matrix(kernel, input_size, stride=1):
kernel_h, kernel_w = kernel.shape
input_h, input_w = input.shape
num_out_feat_map = (input_h - kernel_h + 1) * (input_w - kernel_w + 1)
# 初始化结果矩阵
result = torch.zeros((num_out_feat_map, input_h * input_w))
count = 0
# 计算上下左右各填充多少个)
for i in range(0, input_h - kernel_h + 1, stride):
for j in range(0, input_w - kernel_w + 1, stride):
# 填充成跟输入特征图一样大小
padded_kernel = F.pad(kernel, (j, input_w - kernel_w - j, i, input_h - kernel_h - i))
# (填充后)拉成向量 保存在result中
result[count] = padded_kernel.flatten()
count += 1
return result
# 那就验证一下吧: 验证二维卷积
input = torch.randn(4, 4)
kernel = torch.randn(3, 3)
# 4 * 16
kernel_matrix = get_kernel_matrix(kernel, input.shape)
# 通过矩阵相乘方法计算卷积
mm_conv2d_output = kernel_matrix @ input.reshape((-1, 1))
# 通过API
pytorch_output = F.conv2d(input.unsqueeze(0).unsqueeze(0), kernel.unsqueeze(0).unsqueeze(0))
# print(mm_conv2d_output)
# print(pytorch_output)
3-转置卷积
转置卷积(Transpose Convolution),一些地方也称为“反卷积”,在深度学习中表示为卷积的一个逆向过程,可以根据卷积核大小和输出的大小,恢复卷积前的图像尺寸,而不是恢复原始值;
3.1 Pytorch 调用API
pytorch_transposed_conv2d = F.conv_transpose2d(pytorch_output, kernel.unsqueeze(0).unsqueeze(0))
3.2 对kernel矩阵转置 手动实现
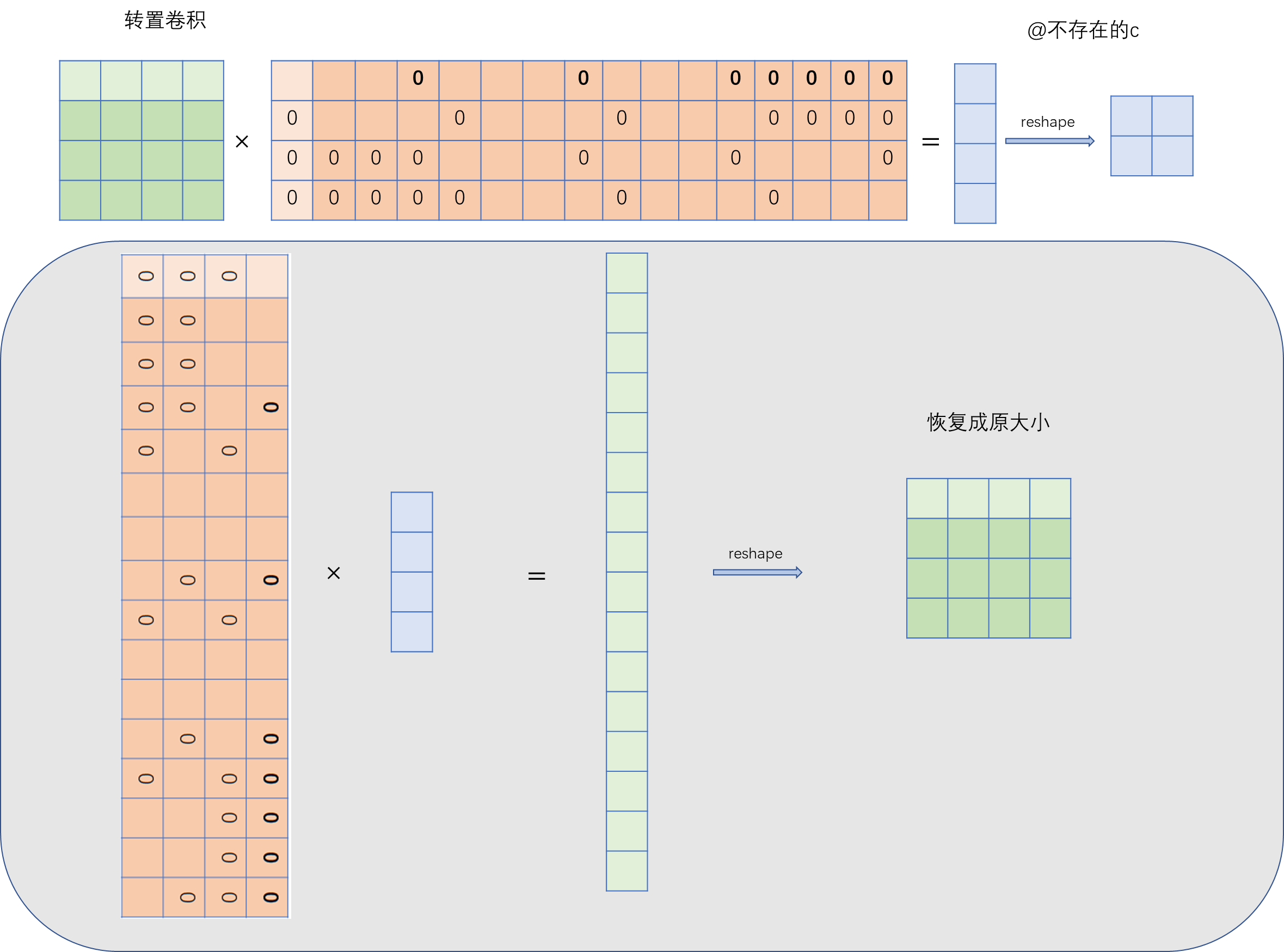
# 转置卷积
# 通过矩阵乘法实现转置卷积
# 2*2 变成 4*4=>上采样的效果
mm_transposed_conv2d = kernel_matrix.transpose(-1,-2) @ mm_conv2d_output
# pytorch 转置卷积
pytorch_transposed_conv2d = F.conv_transpose2d(pytorch_output, kernel.unsqueeze(0).unsqueeze(0))
print(mm_transposed_conv2d.reshape((4, 4)))
print(pytorch_transposed_conv2d)

















 3346
3346

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









