






MobileNetV2: Inverted Residuals and Linear Bottlenecks
MobileNetV2:反向残差(逆向残差)和线性瓶颈
发表时间:[Submitted on 13 Jan 2018 (v1, last revised 21 Mar 2019 (this version, v4)]
发表期刊/会议:Computer Vision and Pattern Recognition
论文地址:https://arxiv.org/abs/1801.04381;
代码地址:;
关键词:MobileNetV1延伸 逆向残差 线性瓶颈
系列论文阅读顺序:
0 摘要
①本文提出了一种新的移动端架构MobileNet V2,在当前移动端模型中最优;
②本文介绍了一种新框架:SSDLite,描述了如何通过SSDLite将这些移动模型应用于对象检测;(不重要)
③本文还演示了如何通过简化形式的DeepLabv3(称之为mobile DeepLabv3)构建移动端的语义分割模型;(不重要)
MobileNetV2 架构基于反向残差结构(inverted residual structure)全文重点;
最后在分类/目标检测/图像分割任务中评估了MobileNetV2的性能;
1 简介
CNN提高准确性的代价往往是消耗大量的计算资源。
本文介绍了一种新的神经网络架构,该架构专门针对移动端和资源受限的环境(比如手机、监控摄像头等),该网络通过显著减少所需的操作和内存数量,同时保持相同的准确性,推动了移动端定制计算机视觉模型的最新技术。
本文主要贡献是一个新的层模块:具有线性瓶颈的逆向残差。该模块输入为低维特征,首先将其扩展到高维,并使用轻量级深度卷积进行滤波。
(说人话:一般方法是先降维后升维,本文先升维,后降维。为什么呢?section 3中具体解释为什么);
2 相关工作
CNN在准确性与性能之间平衡的相关工作;
3 Preliminaries, discussion and intuition
3.1 深度可分离卷积
详情见MobileNet V1;

3.2 线性瓶颈
对于输入CNN的数据,我们把CNN中所有激活层形成的输出叫做"感兴趣的流形"(manifold of interest);人们一直认为神经网络中"感兴趣的流形"可以嵌入到低维子空间中。
这一信息可以通过降维来捕获和利用,比如MobileNet V1中,已经成功利用这一点,通过宽度乘数参数α在计算精度和效率之间取得平衡。
(说人话:特征降维之后主要信息仍然会保留,降维去除冗余信息对正确率影响不大,并且可以减少参数量,提高效率。)
BUT…
当我们想起CNN实际上具有非线性变换(如ReLU)时,这种直觉就崩溃了。比如,当ReLU应用于一维空间时会产生“射线”,应用于n维空间时,会产生具有n个节点的曲线;如图1具体展示:

输入一个螺旋形的张量(典型二维空间,实际就是一堆(x,y)坐标,非线性问题),经过矩阵T变换和ReLU激活后,降维到不同的维度输出并可视化,从图1中可以看出:
-
维度越低,比如 n = 2,3时,损失信息非常多(2和3已经没有螺旋的样子了);
-
维度越高,损失信息越少,n = 15,30最接近输入;
说人话:
- 过渡降维会导致信息丢失,接着用ReLU函数也会导致小于0的部分信息丢失,但是强大的CNN又离不开非线性激活函数(比如ReLU),线性激活CNN只能识别一维空间;
- 所以要先保留冗余的维度进行ReLU,防止信息丢失,也同时能发挥ReLU非线性激活函数的作用;
- 所以要先升维,再降维。(回答section1提出的问题 为了避免信息丢失)
文章强调了两个见解:
- 1:如果"感兴趣的流形"在ReLU变换后保持非零体积,则它对应于线性变换(说人话:如果"manifold of interest"都为正,则经过ReLU相当于做了一个线性变换,没有信息丢失);
- 2:ReLU能够保存关于"感兴趣的流形"的完整信息,仅当输入流形位于输入空间的低维子空间中时(当维度足够多时,ReLU能够保留"manifold of interest"的完整信息);
以上两个见解为我们提供了优化现有神经架构的经验提示:假设"感兴趣的流形"是低维的,我们可以通过在卷积块中插入线性瓶颈层(linear bottleneck)来捕捉这一点。实验证据表明,使用线性层至关重要,因为它可以防止非线性破坏太多信息。
为了减少信息丢失,本文提出了linear bottleneck,就是在bottlenck(1 × 1卷积)的最后输出不接非线性激活层,只做linear操作;

2(a):标准卷积(一个大方块);
2(b):深度可分离卷积(=Depthwise convolution+Pointwise Convolution=薄片片+方块块);
2(c ):【linear bottleneck】(高维后)relu6-dw-relu6-pw降维-升维-;
2(d):和图2(c )等效,(线性激活后)pw升维-relu6-dw-relu6-pw降维-线性激活;
3.3 反向残差(逆向残差)
3.3.1 图解
图3显示了残差连接和反向残差连接的差异。
反向残差的设计大大提高了内存效率,并且在本文的实验中效果稍好。


表1解释:
扩展因子:
t
t
t;
stride: s s s;
①输入:
h
×
w
×
k
h×w×k
h×w×k----pw升维到
h
×
w
×
t
k
h×w×{tk}
h×w×tk;
②经过dw,维度不变h,w根据s变化为
h
s
×
w
s
×
(
t
k
)
\frac{h}{s}×\frac{w}{s}×(tk)
sh×sw×(tk);
③线性激活到
h
s
×
w
s
×
k
′
\frac{h}{s}×\frac{w}{s}×k'
sh×sw×k′;
3.3.2 反向残差代码
class InvertedResidual(nn.Module):
def __init__(self, in_channel, out_channel, stride, expand_ratio):
super(InvertedResidual, self).__init__()
# expand_ratio: 扩展因子t
# in_channel:k
# 输出通道数: tk
hidden_channel = in_channel * expand_ratio
self.use_shortcut = stride == 1 and in_channel == out_channel
# 将所有层保存为一个list
layers = []
if expand_ratio != 1:
# 1x1 pw 接ReLU激活(非线性)
layers.append(ConvBNReLU(in_channel, hidden_channel, kernel_size=1))
layers.extend([
# 3x3 dw
ConvBNReLU(hidden_channel, hidden_channel, stride=stride, groups=hidden_channel),
# 1x1 pw 与一个层不同 这层后接线性激活
nn.Conv2d(hidden_channel, out_channel, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channel),
])
self.conv = nn.Sequential(*layers)
def forward(self, x):
if self.use_shortcut:
return x + self.conv(x)
else:
return self.conv(x)
class ConvBNReLU(nn.Sequential):
def __init__(self, in_channel, out_channel, kernel_size=3, stride=1, groups=1):#groups=1普通卷积
padding = (kernel_size - 1) // 2
super(ConvBNReLU, self).__init__(
nn.Conv2d(in_channel, out_channel, kernel_size, stride, padding, groups=groups, bias=False),
nn.BatchNorm2d(out_channel),
nn.ReLU6(inplace=True)
)
4 模型架构
4.1 模型架构概述
表2描述了MobileNet V2的完整架构;

本文使用ReLU6作为非线性激活函数,训练过程使用dropout和batch normalization;
除了第一层,在整个网络中使用恒定的扩展因子t;较小的网络用较小的扩展因子t表现更好;较大的网络使用较大的扩展因子时表现更好。
MobileNet v2同样使用MobileNet V1中的两个超参数,宽度系数α和分辨率系数ρ;
4.2 架构代码
class MobileNetV2(nn.Module):
def __init__(self, num_classes=1000, alpha=1.0, round_nearest=8):#alpha超参数
super(MobileNetV2, self).__init__()
block = InvertedResidual
# _make_divisible 函数确保为 8 的整数倍
# 为什么?
# 为了快,8,16,24...这些 size 符合处理器单元的对齐位宽(硬件角度)
input_channel = _make_divisible(32 * alpha, round_nearest)
last_channel = _make_divisible(1280 * alpha, round_nearest)
# 定义7个bottleneck的一些参数
# 对照原文表2
inverted_residual_setting = [
# t, c, n, s
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
# 保存层
features = []
# conv1 layer
features.append(ConvBNReLU(3, input_channel, stride=2))
# 逆向残差块
for t, c, n, s in inverted_residual_setting:
output_channel = _make_divisible(c * alpha, round_nearest)
for i in range(n):
stride = s if i == 0 else 1
features.append(block(input_channel, output_channel, stride, expand_ratio=t))
input_channel = output_channel
# building last several layers
features.append(ConvBNReLU(input_channel, last_channel, 1))
# combine feature layers
self.features = nn.Sequential(*features)
# building classifier
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.classifier = nn.Sequential(
nn.Dropout(0.2),
nn.Linear(last_channel, num_classes)
)
# weight initialization
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.zeros_(m.bias)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
MobileNetV2(
(features): Sequential(
(0): ConvBNReLU(
(0): Conv2d(3, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=32, bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): Conv2d(32, 16, kernel_size=(1, 1), stride=(1, 1), bias=False)
(2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(2): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(16, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(96, 96, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=96, bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(96, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(3): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(24, 144, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(144, 144, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=144, bias=False)
(1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(144, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(4): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(24, 144, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(144, 144, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=144, bias=False)
(1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(144, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(5): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(32, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(192, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=192, bias=False)
(1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(192, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(6): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(32, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(192, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=192, bias=False)
(1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(192, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(7): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(32, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(192, 192, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=192, bias=False)
(1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(192, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(8): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384, bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(384, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(9): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384, bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(384, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(10): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384, bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(384, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(11): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384, bias=False)
(1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(384, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(12): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(576, 576, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=576, bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(576, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(13): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(576, 576, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=576, bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(576, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(14): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(576, 576, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=576, bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(576, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(15): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(160, 960, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(960, 960, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=960, bias=False)
(1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(960, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(16): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(160, 960, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(960, 960, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=960, bias=False)
(1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(960, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(17): InvertedResidual(
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(160, 960, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(960, 960, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=960, bias=False)
(1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(960, 320, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(320, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(18): ConvBNReLU(
(0): Conv2d(320, 1280, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(1280, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(classifier): Sequential(
(0): Dropout(p=0.2, inplace=False)
(1): Linear(in_features=1280, out_features=1000, bias=True)
)
)
5 实验

5.1 消融实验
5.1.1 逆向残差
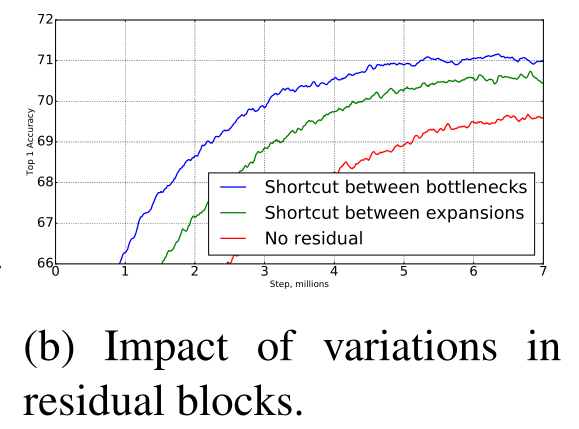
蓝色为逆向残差连接的准确性;
绿色为普通残差连接的准确性;
红色为没有残差连接的准确性;
可以看出,在同等条件下,逆向残差准确性最高;
5.1.2 线性瓶颈

蓝色为在bottleneck后使用线性激活的结果;
绿色为在bottleneck后使用非线性激活的结果;
可以看出,同等条件下,使用线性激活准确性高;














 14万+
14万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









