






矩阵可以理解为向量。所谓向量,就是在一个正交坐标系下,有大小和方向的量。二维/三维矩阵的向量描述,可以用几何图形表示。
例如以下二维矩阵:
D=
可以用图一表示:
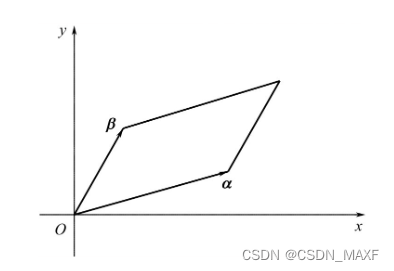
图一
α=a11i+a12j;
β=a21i+a22j;
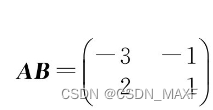
假如A 是两个三维向量(坐标系是xyz),B是二维向量(坐标系是XY),这两个矩阵的乘积,可以理解为坐标系的变换。
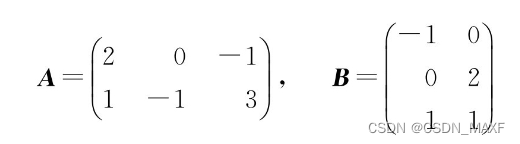
A与B的乘积,可以看成是把三维向量转化为二维向量。B是转换公式,新的坐标系是XY。相乘的结果,是两个二维向量。
从这个角度来考虑:
- 转换前后,向量的个数是没有变化的,即:变化前后的向量个数是一样的。
- 向量的个数,由第一个矩阵的行数确定。
- 向量的维数是可以变化的。变换前后,不一定要求维数是一样的。
- 矩阵的行代表向量的维数。第一个矩阵行的元素个数,代表原始坐标系的维数;第二个矩阵行的元素个数代表目标坐标系的维数。第二个矩阵的行数,要等于原始坐标系的维数。
- 第二个矩阵的大小,由原始坐标系和目标坐标系决定,与向量的个数无关。
- 如果两个矩阵A、B的乘积存在,则矩阵B、A的乘积不一定存在。因为A矩阵包含向量的个数,不是单纯的坐标系转换。
任何单位对角矩阵(即对角线上的元素为1,其他元素为0),与相同大小的矩阵相乘,结果是这个矩阵自身。可以理解为,单位对角矩阵与变换矩阵的乘积,就是变换矩阵本身。
图二是用Matlab实现的一个单位对角矩阵,对角线上的点为1,其余的点位0;
图二
图三是一张正常的彩色图片的灰度图经过图形转换的前后对比。变换方式是:
tform=maketform('projective',[1 0 0;.5 2 0;0 0 1])
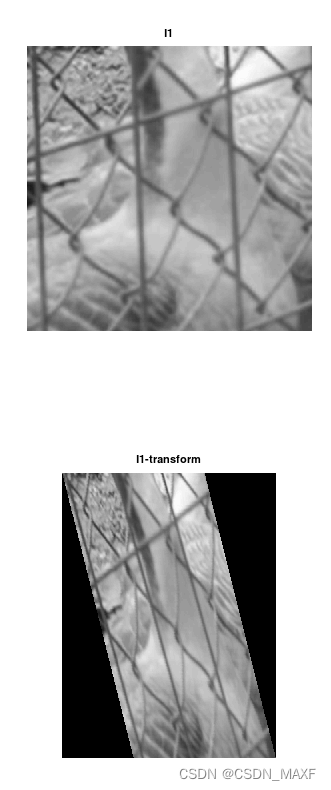
图三
图四是单位对角矩阵经过相同变换后的图形。
图四
图五是单位对角矩阵变换后的矩阵数据截图(原始数据为对角线上的值为255,其余为0)。

图五
图六是单位对角矩阵变换前后每个像素点的形状对比。
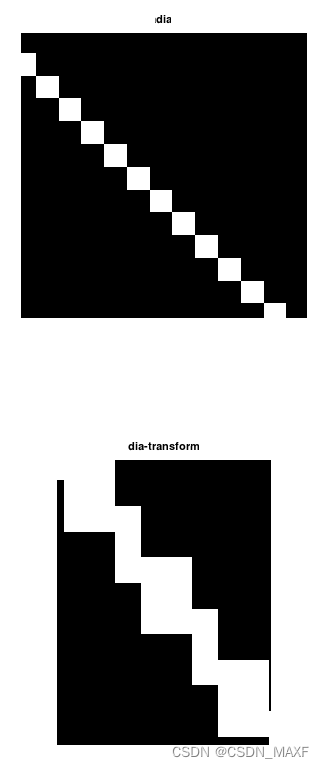
图六
单位对角矩阵的变换结果,就是变换矩阵自身。所以,可以看到该变换的特点:
- 输出矩阵的行和列的大小有变化(有插值);
- 在矩阵的对角线上的值有变化,并且周围3个像素的值有相应变化。
END


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









