






作者 | 牛牛牛肉饭 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/660216714
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心技术交流群
本文只做学术分享,如有侵权,联系删文
2023年已经匆匆过去大半,不知各位自动驾驶小伙伴今年的工作生活情况是否顺利呢?高阶ADAS方案量产了吗?新的文章和实验进展又是否顺利呢?今天给大家总结了2023年前后的一些基于Lidar 方案的3D Detection文章和开源项目的分享。
2023年也是高阶自动驾驶方案从Demo走向量产的一年,在这一年里学术界着重讨论了3D Lidar Detection更快(Edge端更友好的模型),更高(更高的数据有效率),更强(带来提点的模型结构)。
这片文章我们一共总结了6篇文章,分别从模型结构提升3D Detection任务的检测精度。这几篇文章分别从,稀疏卷机算子,CNN模型结构,Transformer模型结构,后处理几个方面改进了纯Lidar Detection任务。
一. 带来提点的模型结构
模型结构要从算子说起,基于稀疏卷积算子的点云检测模型一直以来是3D PointCloud Detection的重要组成部分,在2022年我们见到了FocalSpconv这样优秀的工作。今年来随着大卷机核在2D视觉任务上取得了成功,研究者在2023年挑战了3D卷机上的大Kernel实现的可能性。
1. LargeKernel3D: Scaling up Kernels in 3D Sparse CNNs
简介:这是一篇来自Deep Vision Lab文章,发表在了CVPR2023上。作者发现了3D Spconv中应用的大卷机核时,并不如2D任务中一样那么有效。为了应对这些挑战。提出了Spatial-wise Partition Convolution,提高了3D Spconv在大卷积核时的效率低下问题,和过拟合问题。
主要方法:
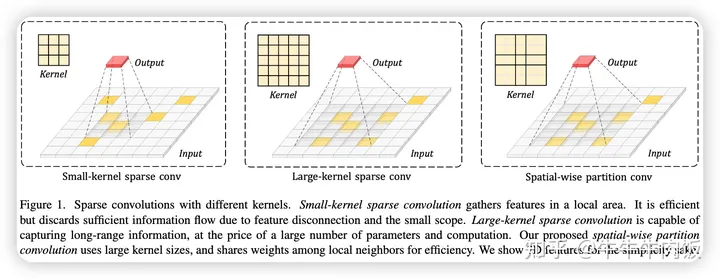
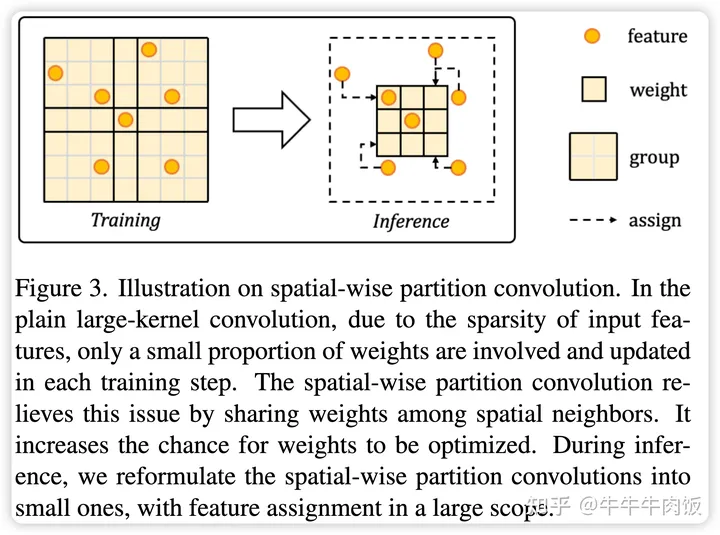
Spatial-wise Partition Convolution :和2D卷机在通道维度上共享权值,Spatial-wise Conv在空间维度上共享权值。与其在整个特征图上使用单个大型卷积核,不如将特征图分成较小的区域,然后在每个区域应用卷积操作。通过在空间邻域内共享权重,可以提高这些权重在训练期间的有效优化机会。这是因为相同的一组权重用于多个空间位置,有助于捕捉空间模式,并减少需要更新大量参数的需求。在推理阶段,可以将空间分区卷积重新构建为较小的卷积,其中特征在较大范围内进行分配。这有助于确保在推理阶段仍能够实现训练期间的权重共享优势。
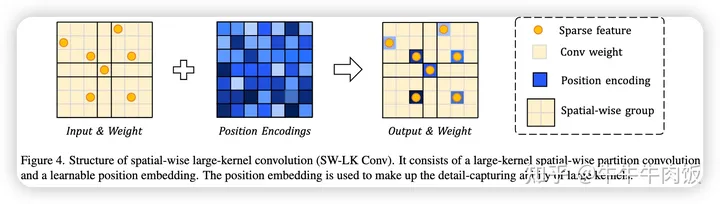
Kernel-wise Position Encoding:考虑到空间分区卷积是以共享权重的方式设计来应对空间稀疏性。尽管这个设计是高效的,但仍然存在一个问题:在一个区域内的体素(像素的三维等效物)共享相同的权重,这导致了局部细节的模糊。当卷积核尺寸增加时,这一现象会进一步加剧。为了解决这个问题,作者提出了核位置嵌入(kernel-wise position embedding)的方法。特别是,我们初始化位置权重,这些权重对应于卷积核。在卷积过程中,允许输入特征查询等效位置的位置权重,并将它们相加在一起。这样既带来了效率又提高了模型的局部细节能力。
实验结果:
作者首先验证了普通的3D Spconv与本文提出的SW-Spconv之间的效率对比,随着感知核的增加,本文提出的方法参数量和kernel级别的延迟都远小于普通的3D Spconv

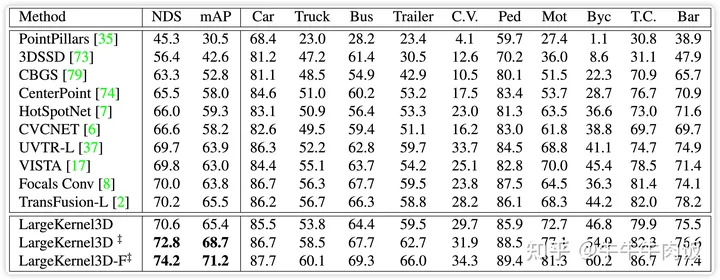
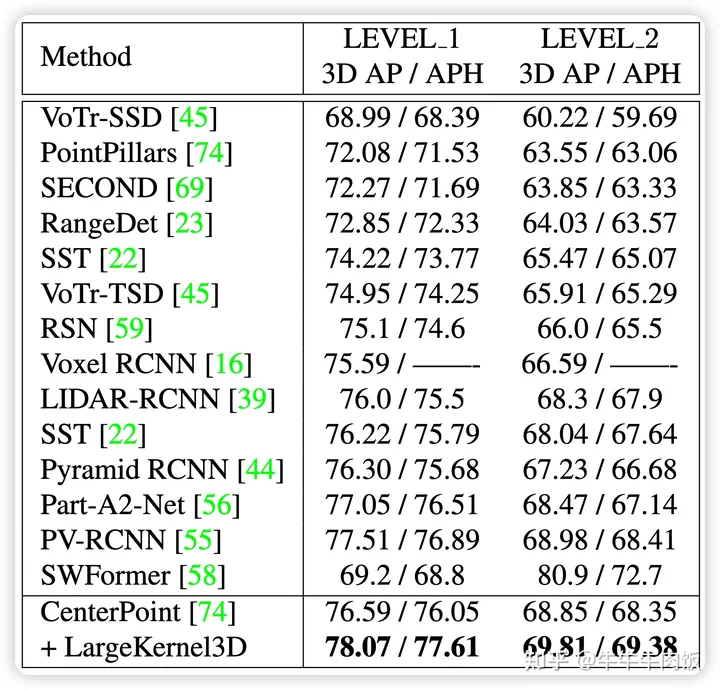
作者同样将提出的模型在nuscenes(7x7), 和 waymo(17x17)上分别做了提交,都实现了在纯Lidar任务上的T0的性能表现。值得注意的是即使使用了最简单的camera + lidar的 fusion策略,largekernel在nuscenes数据集上也获得了接近bevfusion的成绩。
2. LinK: Linear Kernel for LiDAR-based 3D Perception
简介:这是一篇来自南大媒体计算研究组的文章,同样发表在了CVPR2023上。上文中的LargeKernel3D利用了空间共享权值解决3D LargeKernel Spconv的计算开销立方增长的问题。本文作者提出了不同的解决方案,提出了Linear Kernel Generator和Block Based Aggregation方法实现了以一致的开销实现任意大小的Linear Kernel。
主要方法:
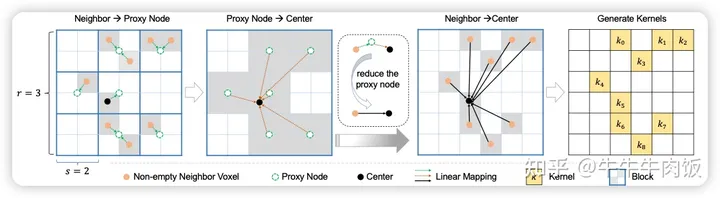
Linear Kernel Generator的工作过程如下:首先,将输入数据分割成不重叠的块(块的大小为s^3)。然后,每个非空的体素将其特征传送给相应块的代理(proxy)。接着,中心体素仅从相邻代理(邻域范围为r^3)中提取特征。这个“推”和“拉”过程以可减小的方式进行,以支持每次潜在调用时的代理的重复使用。最终生成的矩阵充当卷积核,用于加权邻域特征。这个过程有助于构建LinK的卷积核,以更好地感知远距离的上下文信息,提高了3D感知的性能。
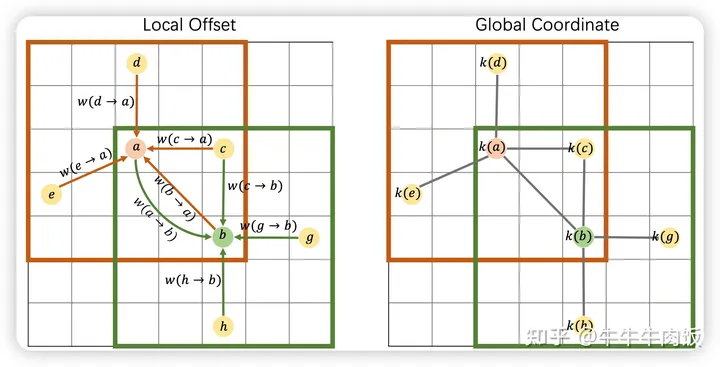
Block Based Aggregation: 基于local offset方法来获取权重是无法服用算子重叠区域的聚合结果的,这样在计算重叠区域时一定会引入额外的计算量。为了解决这个问题,考虑到每个位置的global coordinate是唯一的,我们提出,将local offset拆分为global coordinate的组合。
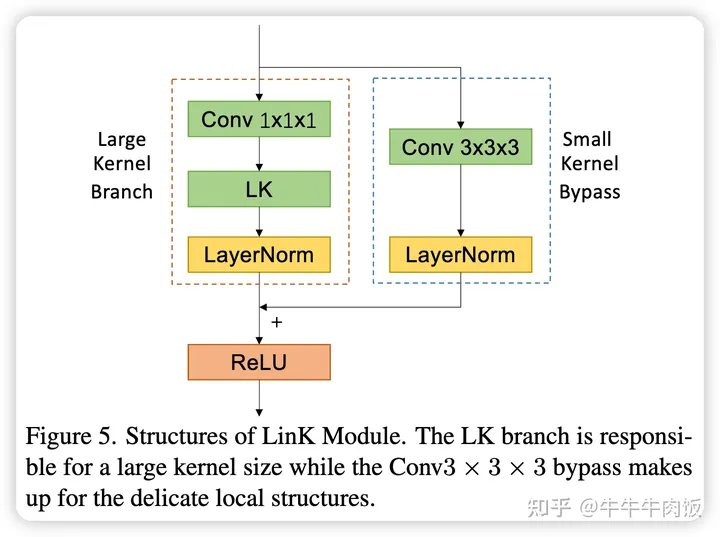
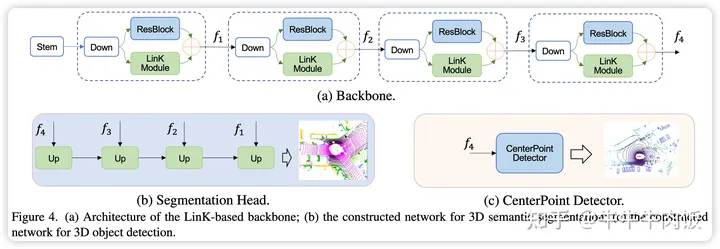
Network Architecture:除了算子工作外,LinK还对网络的结构作出了一定的优化 ,LinK模块由两个分支组成:一个分支为使用线性投影+三角核函数实现的大核分支,另一分支为3x3x3的稀疏卷积小核旁路,
在应用到下游任务(检测和分割)中时,作者分别选取CenterPoint和MinkUnet作为基础架构,并使用基于LinK的backbone替代了原本基于稀疏卷积实现的backbone,保留了原始的检测头和分割头不变,具体结构如下图所示。
实验结果:
作者同样将提出的模型在nuscenes上做了提交,在类似的网络规模下,作者和LargeKernel3D比较,在原始和TTA的结果上均略好于LargeKernel3D.
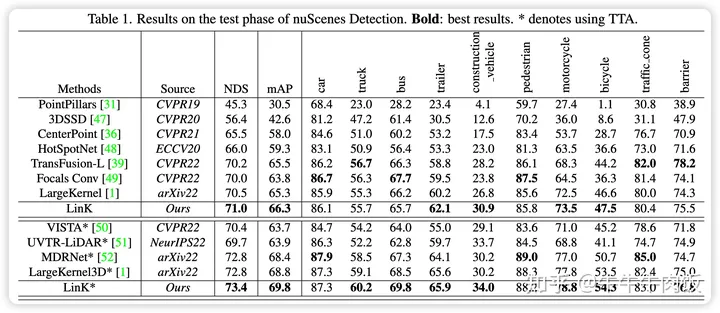
来自调包既SOTA的工程师小结:LinK和LargeKernel都是完全兼容现有Spconv路线下的3D卷积方案的,都是即插即用的平替算子事实上可以和CenterPoint,PVRCNN(替换voxel部分),VoxelNext等方案做很好的结合。
介绍完算子的进步后,我们看看基于Lidar的3D detection在网络结构上有什么优化工作,主要有两个大的方向:在既有CNN架构上寻找更好的结构,探索Transformer和Lidar 3D Detection的结合。那首先引出第一篇工作:
3. PillarNeXt: Rethinking Network Designs for 3D Object Detectionin LiDAR Point Clouds
简介:这片文章来自QCraft(一家自动驾驶初创企业创始人团队很多也是出自waymo),发表在了CVPR2023上。虽然目前无论是基于Point还是Voxel的方案都为3D Detection带来了出色的精度和不错的推理速度。但是作者认为最简单的基于pillar结构的模型在精度和延迟方面表现出人们出乎意料的良好性能。基于这个观点QCraft的团队从2D检测任务中的很多SOTA trick为基础,在Pillar的结构下完成了精度和速度的双赢。
主要方法:
Network Architecture: 通常基于Pillar的网络由四个部分组成:1)用于将原始点云转换为结构化特征图的Encoder. (2)用于一般特征提取的Backbone 3)用于多尺度特征融合的Neck 4)用于特定任务输出的检测Head 组成 。基于这个背景,作者分别对这四个模块进行讨论和调优。
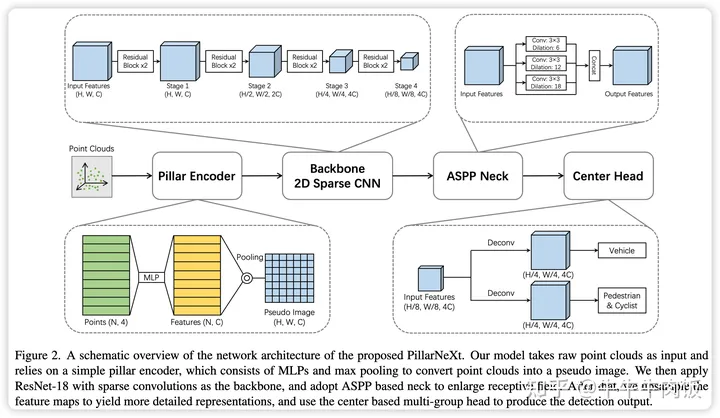
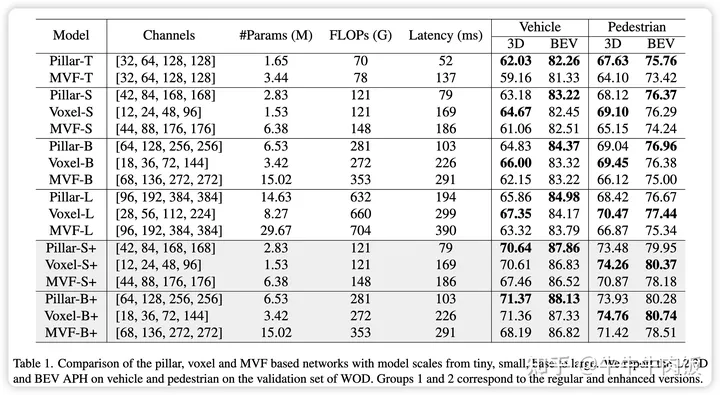
Grid Encoder: 作者对Pillar/Voxel/多视图融合MVF三种网格编码器进行了研究:
Pillar(柱状):基于柱状的网格编码器将点排列成垂直列,并应用多层感知器(MLP)以及最大池化来提取柱状特征,这些特征被表示为伪图像。
Voxel(体素):与柱状相似,基于体素的网格编码器将点组织成体素,获取相应的特征。与柱状相比,体素编码器在高度维度上保留了更多细节。
Multi-View Fusion (MVF,多视图融合):基于MVF的网格编码器将柱状/体素编码和基于范围视图的表示进行融合。将柱状编码器与基于圆柱坐标的视图编码器结合起来,以将点分组。
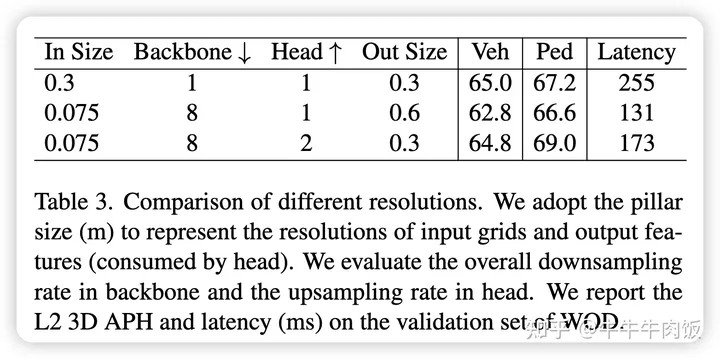
在此基础上,通常情况下在一般的waymo任务会将voxel或者pillar的方案的尺寸设计成0.075作为一个比较公平的基线。作者讨论了如果的resolution对最终的检测结果的影响。不会影响诸如车辆之类的大目标的性能,但会降低诸如行人之类的小目标的精度。对输出特征分辨率(0.3到0.6)进行下采样会损害这两个类别的性能。
Backbone:使用基于Pillar或MVF的编码器在Backbone 中使用稀疏2D卷积,使用基于Voxel的编码器在Backbone 中使用稀疏3D卷积。网络的结构将参考resnet18的结构进行设计。如下图所示,基于Pillar的检测任务在相同的参数量核延迟的情况下,在不同规模的网络尺寸下整体是较优的。
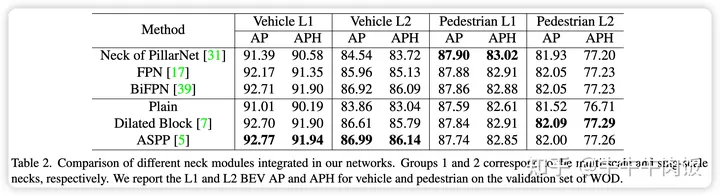
Neck:对集成在我们的网络中的不同颈部模块进行了比较。第1组和第2组分别对应多尺度和单尺度颈部。我们在Waymo开放数据集(WOD)的验证集上报告了车辆和行人的L1和L2 BEV AP以及APH。最后发现ASPP模块获得了最好的检测结果。
Detection Head:作者发现如果简单地在检测头中提供上采样层,可以获得显著的改进,尤其是对于小目标。这表明细粒度信息可能已经被编码在下采样的特征图中,并且Head中的简单上采样层可以有效地恢复细节。
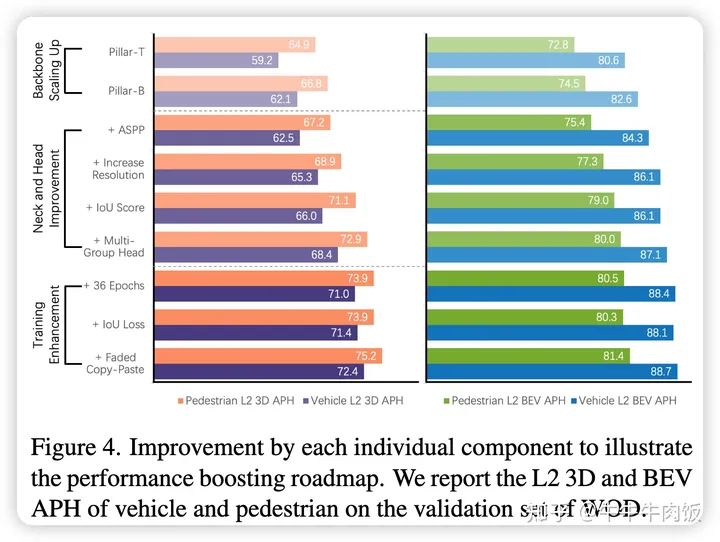
实验结果与总结:作者提供了每一个小的trick的改进和模型最终成绩的提升路线。我们可以看出模型缩放,增强neck/head,训练策略的修改都会让模型产生巨大的进步。
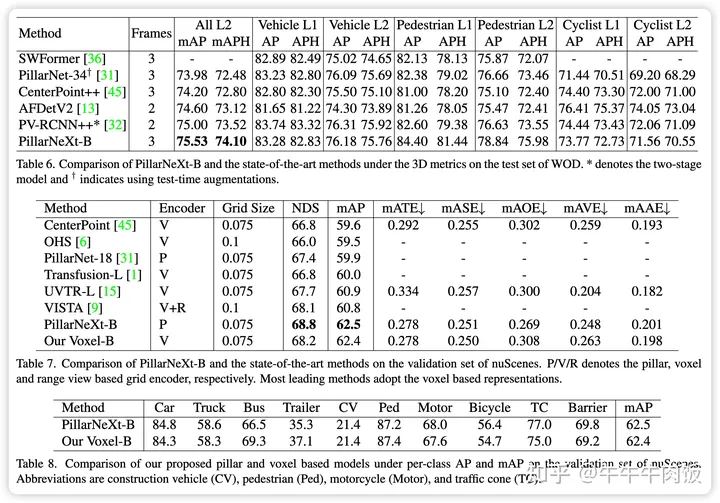
作者分别将模型在waymo和nuscenes上的成绩与SOTA进行了对比,模型的成绩基本都超越了现有的SOTA。

Pillarnext其实更多的是一篇调参经验,其中的使用的方法和模块基本都是耳熟能祥的,不过能调到一个SOTA成绩也是相当的不易,2023年还有另外一篇3D Detection的Next文章同样发表在CVPR2023上,:
4. VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking
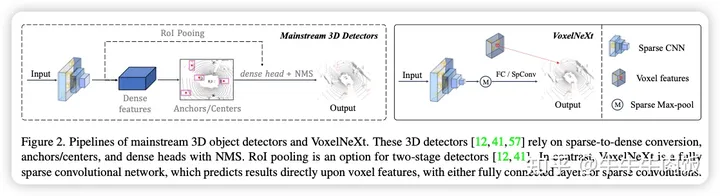
简介:这是一篇来自Deep Vision Lab文章,发表在了CVPR2023上。之前提出的主流3D目标检测器通常依赖于手工制定proxy,比如:anchor, center, 并将经过充分研究的2D框架转化为3D。这片文章中作者提出了一种名为VoxelNext的全稀疏3D目标检测方法。可以直接基于稀疏体素特征预测对象,而不依赖于手工制定的proxy。
主要方法:
Additional Down-sampling:之前PVRCNN等任务中的voxel网络一般只有四层特征既F1,F2,F3,F4。本文在此基础上额外进行了两层采样,得到了F5和F6,并基于此将特征对齐到了F4。这样在F4层上的特征就拥有了更大的感受野。
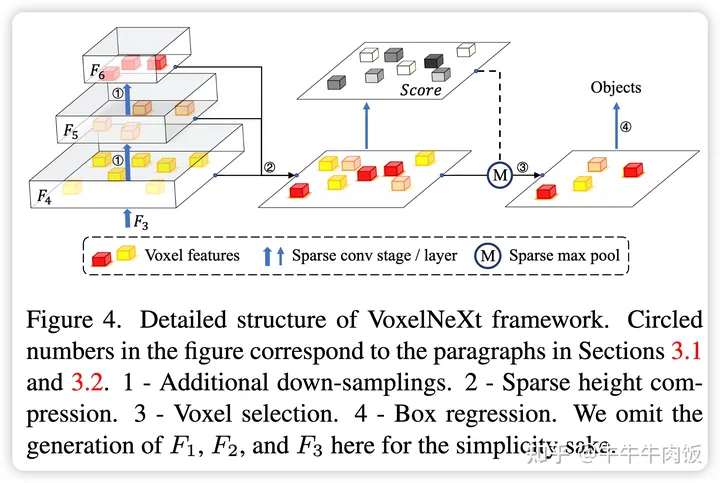
Sparse Height Compression:在之前的3D目标检测器中,将3D体素特征压缩成密集的2D特征图,通过将稀疏特征转化为密集特征,然后将深度(沿z轴)合并到通道维度。这些操作会消耗内存和计算资源。然而,在VoxelNet中,使用2D稀疏特征进行预测更加高效。这样其高度的压缩是可以完全稀疏的。作者将所有体素都放在地面上,然后对相同位置的特征进行求和。这仅需要不到1毫秒的时间。
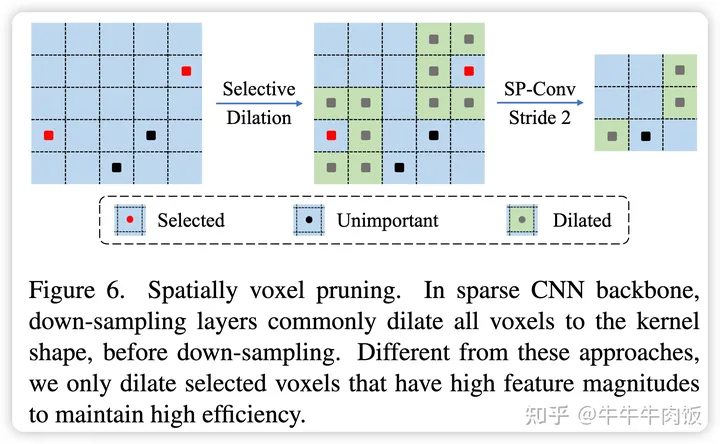
Spatially Voxel Pruning:
在3D场景中,通常包含大量冗余的背景点,对预测几乎没有任何益处。因此,我们在降采样层逐渐剪除不相关的体素。类似于SPS-Conv,我们抑制那些特征幅度较小的体素的膨胀,以抑制比率为0.5为例,只对那些特征幅度|fp|(在通道维度上求平均)位于所有体素的前一半的体素进行膨胀。这种体素的剪除大大节省了计算资源,同时不影响性能。
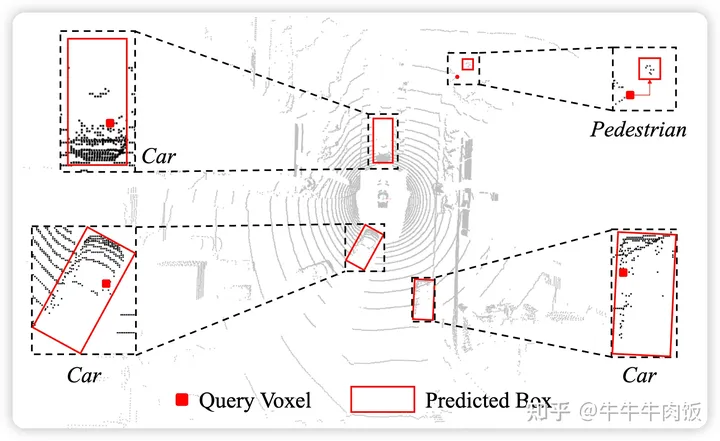
Voxel Selection:Detection Head部分直接基于3D CNN骨干网络的稀疏输出来预测对象。在训练过程中,将距离每个注释边界框中心最近的体素分配为正样本。使用Focal loss进行监督。需要注意的是,推理时匹配的体素通常不位于对象中心。它们甚至不一定在边界框内,为了进一步对模型进行加速在推断期间,我们通过使用稀疏最大池化来避免NMS后处理,因为特征已经足够稀疏。
Box Regression:边界框直接从正样本的稀疏体素特征回归,损失使用L1损失。直接使用了3X3的稀疏卷机进行了回归。
实验结果与总结:作者分别将模型在nuscenes上的成绩与SOTA进行了对比,我们加入和前面的Pillarnext对比,模型是比pillarnext有更好的结果的。
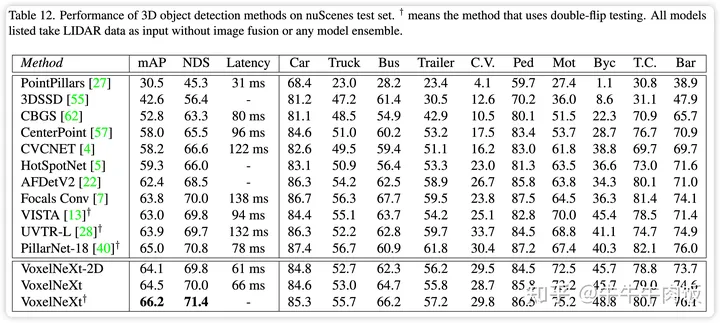
进一步笔者复现了Largekernel(65.4) + VoxelNext(66.2)+TTA的成绩,是优于单独的LargeKernel和VoxelNext的。
PillarNext和VoxelNext是2023年基于卷积方案最有代表性的两篇文章,Transformer当然也是目前很热点的研究方向:
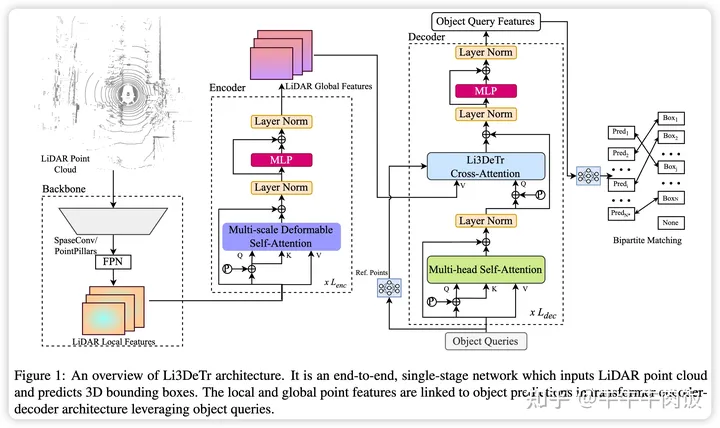
5. Li3DeTr: A LiDAR based 3D Detection Transformer
简介:来自于哥大的论文,发表在WACV2023上。这篇文章的核心是把Deformable DETR应用到了LiDAR 3D检测任务。
主要方法:
Backbone:为了加速大规模点云的3D目标检测,作者将点云散布到BEV网格中,并使用CNN来提取局部点特征,测试了两种处理流程:
使用[0.1, 0.1, 0.2]米的体素尺寸对点云进行体素化处理,然后利用SparseConv来计算3D稀疏卷积,获取局部体素特征。空的体素被填充为零,稀疏的体素被转换为类似BEV 2D网格的特征。
将点云转化为密集的BEV柱状图,使用[0.2, 0.2, 8]米的Pillar分辨率。Pillar特征网络来处理柱状特征。最后,采用SEC-OND 骨干网络从稀疏体素或BEV柱状特征中提取局部体素特征,并使用FPN进一步转换,得到多尺度的局部体素特征图。
Encoder: 为了获取从局部体素特征图中提取的Global Voxel Feature,作者采用了多尺度可变注意力机制,这是为了避免在Encoder高分辨率特征图时导致不可接受的计算复杂性。多尺度可变注意力结合了可变卷积的稀疏采样和Transformer的长距离关系框架,它仅关注参考点周围一小组关键采样点,从而降低了计算复杂性。Decoder中的每个层由多尺度可变自注意力和MLP块组成,具有残差连接,并在网络中重复多次。Global Voxel Feature从Encoder中提取出来,然后传递给Decoder中的Li3DeTr交叉注意力块。
Decoder: 与现有的3D目标检测方法不同,该方法采用解码器来进行检测,而不是预测每个Pillar或使用Anchor。Decoder的输入包括一组对象查询和全局Voxel Feature Map,Decoder层被多次重复以细化对象查询。在每个Decoder层中,3D参考点是通过全连接网络编码从对象查询中得到的。Decoder层包括Li3DeTr交叉注意力块、多头自注意力块和MLP块,具有跳跃连接,用于预测一组边界框,从而消除了后处理步骤(如NMS)的需求。这种方法通过优化预测过程,提高了3D目标检测的效率和性能。
Li3DeTr cross-attention:Li3DeTr Cross Attention块接收了对象Query、3D参考点和LiDAR全局多尺度特征图作为输入用于处理3D目标检测。在该模块块中,通过将参考点投影到不同尺度的LiDAR Global Voxel Feature中,实现了多尺度的特征采样。这些采样的特征经过一系列计算,得到了交叉注意力特征,用于更新对象查询。每个对象查询用于预测与目标框位置、大小、方向、速度和类别相关的信息。
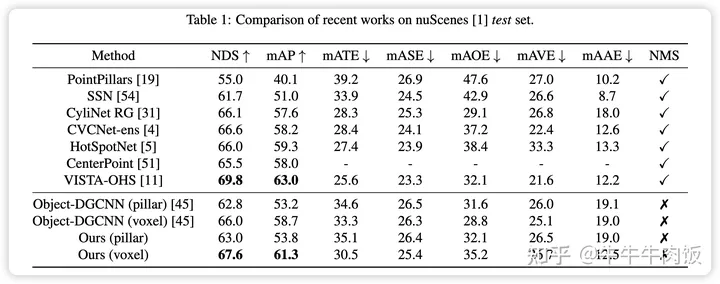
实验结果与总结:作者分别将模型在nuscenes上的成绩与2021 年的一些SOTA进行了对比,性能没有超过Largekernel等作品。
不过基于Transformer的方案成功的把3D NMS操作给摘掉了,一方面3D NMS操作在场景比较复杂的情况下会计算上千个proposal框,造成推理的延迟。基于Transformer的方案实现了NMS free,这也为另外一个基于更高推理速度的DSVT的推理侧模型提供了基础。
6. FocalFormer3D : Focusing on Hard Instance for 3D Object Detection
简介:这篇文章来自于第一作者在Nvidia期间的工作。该研究关注了3D目标检测中的FN问题,即漏掉了行人、车辆和其他障碍物的情况,这可能导致自动驾驶中的潜在危险。作者提出了一种名为Hard Instance Probing(HIP)的通用流程,以多阶段方式识别FN,并引导模型专注于挖掘难以处理的实例。
主要方法:
网络结构:该框架由两个关键组件组成:multi-stage heatmap encoder和deformable Transformer encoder网络。multi-stage heatmap encoder采用Hard Instance Probing(HIP)策略,生成高召回率的目标查询,通过一系列阶段来选择和收集目标候选项。Deformable Transformer decoder网络负责处理各种目标query,它使用box pooling来增强查询嵌入,通过中间目标监督来识别局部区域,并以局部方式优化目标query。这一框架的综合作用是提高了目标检测的性能,减少了假阳性的发生。

Hard Instance Probing:
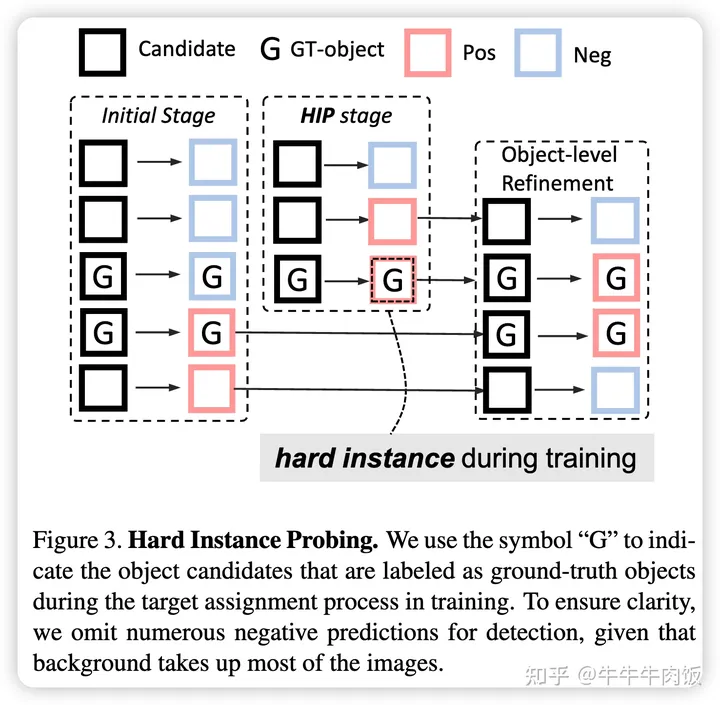
HIP的策略是逐阶段识别难以处理的实例。初始阶段,有一组地面实际目标对象O以及一组初始目标候选项A。神经网络在每个阶段根据这些候选项进行正面或负面的预测,其中候选项可以是各种类型,不仅限于锚点。每个阶段会产生一组已检测到的目标,然后根据它们与实际目标的匹配关系来分类实际目标。这种匹配可以使用不同的度量标准和阈值来实现。未匹配的实际目标将在后续阶段中继续处理,以提高检测的召回率。
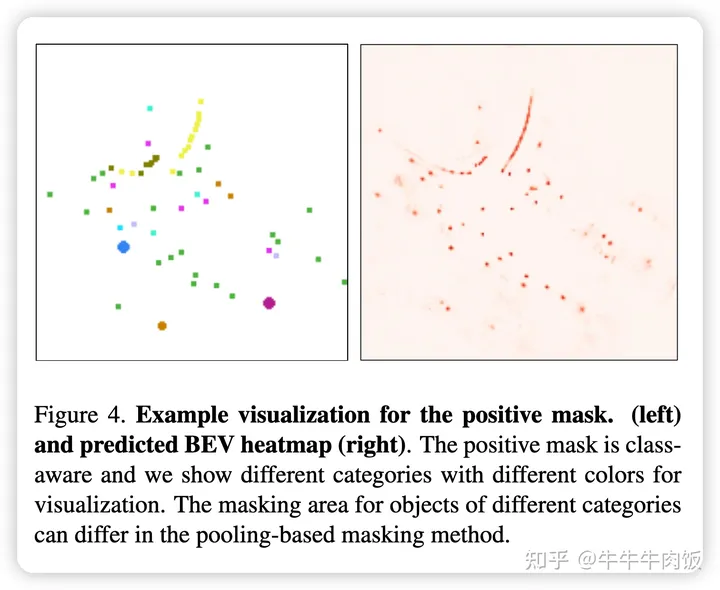
Multi-stage Heatmap Encoder:BEV视角下的Heatmap是3D检测任务中表示衷心位置产生的高斯表示。
根据不重叠的假设,作者提出了一种用于在训练期间指示正面目标候选项存在的方法。由于在推断时地面实际目标框不可用,作者采用了以下遮挡方法:
点遮挡:仅填充正面候选项的中心点。
基于池化的遮挡:较小目标填充中心点,较大目标使用3×3内核大小填充。
目标框遮挡:需要额外的目标框预测分支,填充预测的BEV框的内部区域。
累积正面掩码(APM)通过累积先前阶段的正面掩码获得。通过遮挡BEV热图,在当前阶段省略了先前阶段的简单正面区域,使模型能够专注于先前阶段的假阴性样本。在训练和推断过程中,收集所有阶段的正面候选项,用于第二阶段的重新评分作为潜在的FN预测。
Box-level Deformable Decoder:Decoder阶段模型通过Multi-stage Heatmap Encoder生成目标候选项,这些候选项可以视为位置对象Queries。不增加FN的情况下提高初始候选项的Recall。为提高效率使用了变形注意力,而不是计算密集型的模块。
实验结果:下表实验结果充分证明了FocalFormer3D模型的卓越性能。无论是在基于LiDAR的3D目标检测还是多模态3D目标检测方面,该模型都取得了显著的性能提升,甚至在一些罕见类别上也表现出色。值得注意的是在Lidar 单模态任务结合TTA的情况下 FocalFormer3 D任务已经优于BEV-Fusion等单帧的多模态BEV融合任务了。
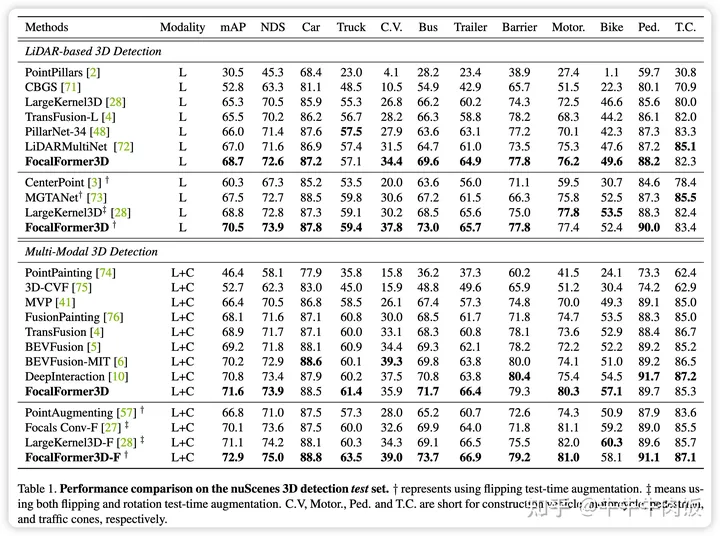
额外,FocalFormer的改进其实是基于BEV Heatmap的,所以这个结构无论对于Lidar only,还是BEV Fusion或是Camera BEV的方案原则上都是可行的,值得大家参考。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









