






点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
论文作者 | Fangzh
写在前面
自动泊车系统是指在没有人工干预的情况下,车辆本身可以自主的实现停车位的寻找并完成准确的泊车,同时该系统也可以根据用户的需求准确移动到用户指定的位置上。如果自动泊车技术成熟后,可以极大缓解人们在泊车过程中的诸多不便,比如:长时间搜寻停车位置浪费时间、在寻找停车位的过程中易出现事故(车辆碰撞、摩擦)等问题。
所以目前很多技术公司和高校的实验室都正在探索这个领域,比如,奔驰和博世等公司已经为自动泊车系统建立了泊车基础设施、NVIDIA正在开发一种在停车场的自动驾驶算法以及关于停车位的检测方法、宝马公司也准备将自动泊车模块安装在其生产的汽车上。
考虑到自动泊车技术在工业界的广泛需求,我们对自动泊车系统的发展状态进行系统性的调研。包括自动泊车系统的行业标准趋势、性能评测指标、自动泊车系统各个子模块设计到的技术等。
目前自动泊车行业的标准趋势
由于目前自动泊车系统受到了来自工业界和学术界的广泛关注,各个国家和公司都在不断的开发自动泊车技术。所以对于制定自动泊车技术的标准就变的格外重要。目前已经制定的技术标准包括地理信息、室外定位、室内空间定位、停车标准以及车辆通信标准几个方面的内容,具体标准汇总在如下的表格中。
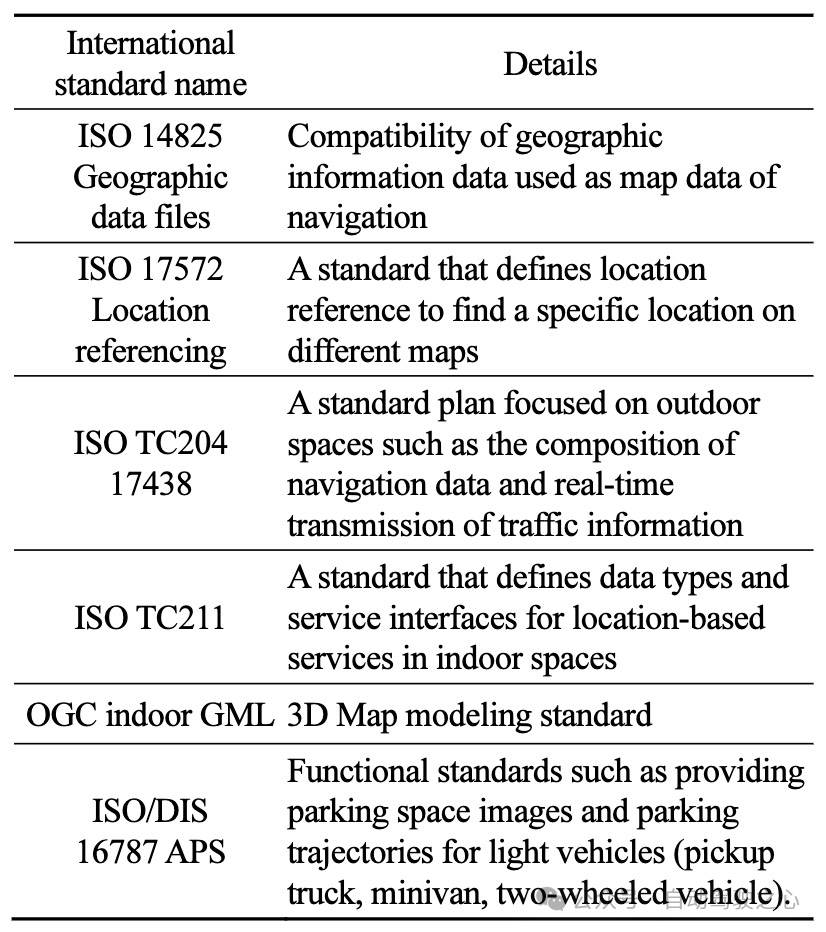
地理信息和定位标准为室外空间的命名、定义和格式建立了原则和依据,此类标准包括 ISO 14825、ISO 17572 和 ISO TC204 177438等。
室内空间定位的标准化也在制定当中,包括ISO TC211以及OGC标准。
ISO/DIS 16787 APS停车标准提出了停车所需要的信息类型,并定义了控制车辆的技术名称。此外,该标准还定义了实施辅助停车系统所需要的功能以及执行车辆的转向控制功能。
自动泊车系统的评测标准
目前自动泊车系统的评测包括两部分,分别是自动驾驶部分的评测以及自动泊车部分的评测。
自动驾驶部分的评测标准
自动驾驶部分的评测遵循汽车工程协会制定的“自动驾驶技术阶段”。该阶段目前被划分为六个层级。其中六个层级的划分是基于技术水平、控制主体以及驱动能力进行分类的。目前正在研发的ISO/WD 34501和ISO/WD 34502标准就用于去更加方便的评估各个层级。ISO/WD 34501标准适用于第三级系统中测试场景的术语和定义,ISO/WD 34502标准定义了测试场景的指南和安全评估过程。
自动泊车部分的评测标准
虽然自动泊车技术目前受到了非常广泛的关注,但是对于评估自动驾驶停车区域的国际标准的制定却刚刚开始。所以与自动驾驶中的评测标准不同,针对自动泊车的技术水平是根据开发人员的评估标准来衡量的。
下表展示了交通状况场景系统中自主停车场景的样例,该停车场景就是根据性能级别进行划分的。
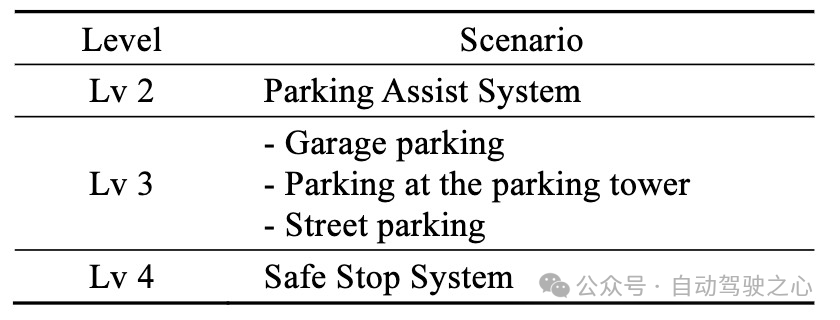
在交通状况场景系统评估包括自动驾驶和停车两部分场景,并且使用汽车工程协会定义的“自动驾驶技术阶段“来指出自动泊车的能力。目前该系统当中包含三个层级。
第二级别(Lv2):称为泊车辅助系统用于帮助人们更方便的泊车。在Lv2级别中,通常车辆会配有障碍物距离预警系统以及后视相机。
第三级别(Lv3):Lv3级别可以实现指定场景下的自动泊车。比如在车库中停车的这一类简单的泊车场景。
第四级别(Lv4):Lv4级别中可以执行Lv3级别中的所有场景。除此之外,当车辆遇到障碍物的时候,车辆可以在停止或者避开障碍物后返回目的地。
自动泊车系统详解
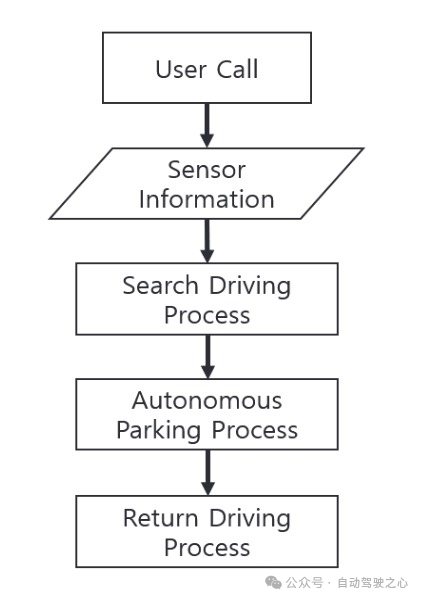
目前自动泊车系统当中主要包括三部分的内容,如下图所示,分别是搜索驾驶过程,自动泊车过程以及返回驾驶过程。我们先对每个过程做一个大致的介绍,然后再介绍每个过程目前各自的发展趋势。
搜索驾驶过程
搜索驾驶过程的最终目标就是在停车场当中汽车可以自主的找到一个停车位,所以该过程需要用到定位、防撞以及停车位检测技术。
定位技术介绍
在自动泊车系统当中,可以使用GPS或者车辆自带的IMU传感器来确认车辆的速度和姿态并且纠正车辆的位置估计误差。但是在某些室内场景,是无法接收到GPS信号的。所以自动驾驶车辆就需要配备相机、激光雷达以及毫米波雷达进行辅助。下图是车辆上配备的一些传感器信息的介绍。
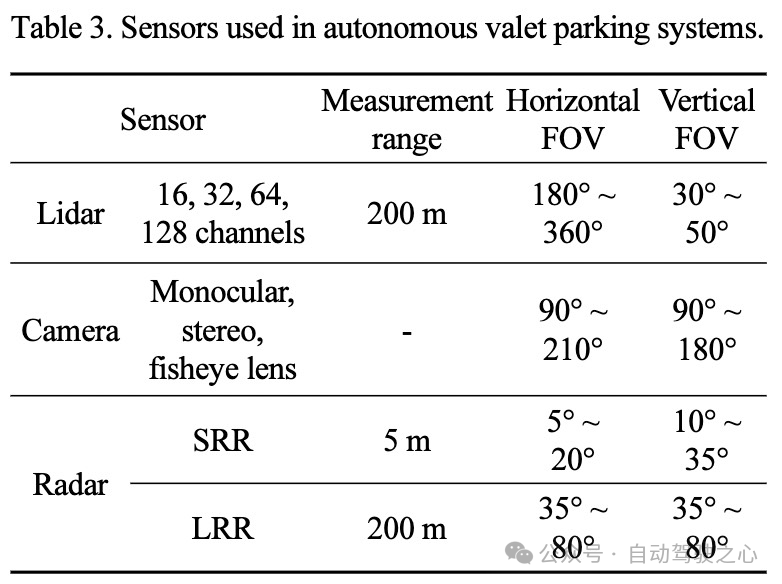
激光雷达传感器使用激光来检测物体。现在主要流行的激光雷达主要分为16、32、64和128线的激光雷达。其测量范围约为200米,垂直视场为30到50度。
相机传感器则可以大致分成单目、双目以及鱼眼类型。通常自动驾驶车辆配备的相机其水平视场为90到210度,垂直视场为90到180度。
毫米波雷达根据距离可以划分成短程雷达和长距雷达。其中,短程雷达的范围大约到5米,水平视场为5到20度,垂直视场为10到35度。长距雷达的范围大约可以到200米,水平和垂直视场为35到80度。
再获得了这些不同传感器采集到的信息之后,就可以利用SLAM建图技术对自动驾驶车辆周围的环境进行重建,从而实现对车辆的定位。而SLAM建图技术又可以分成以下两大类
直接建图法:跟踪传感器移动时变化的数据的强度来估计传感器的姿态。但由于该类方法容易受到光照变化的影响,不能实现重定位,导致目前的建图方法很少基于此类方法。
基于特征的建图法:该类方法首先从传感器信息中获得周围物体的特征点。从同一对象接收到的特征点投影到两个不同的传感器坐标,通过计算投影点的几何关系来估计目标的位置。
防碰撞技术介绍
由于自动泊车系统的主要应用场景是在停车场,而停车场中会停有很多车辆,所以防碰撞技术非常重要。在防碰撞技术中,主要会使用超声波传感器、短波雷达传感器、激光雷达传感器以及相机传感器。声波以及雷达传感器主要是用来实现准确的测距。相机传感器主要是利用同一物体在连续图像中位置的差异来估计深度上的距离。
停车位检测技术
停车位检测是在搜索驾驶的过程中不断执行的,通常会包括传统的计算机视觉、深度学习以及两种方法的混合实现。
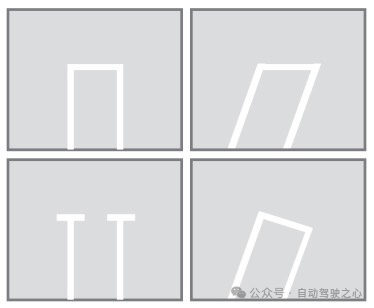
传统的计算机视觉主要是指定和识别停车位的形状,如车位线检测以及特征点检测,如下图所示。
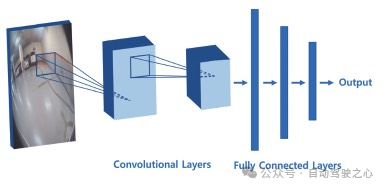
得益于深度学习的快速发展,目前基于CNN网络的方法被广泛应用于停车位检测当中。下图表示了用于停车位检测的代表性卷积神经网络结构。卷积层学习输入图像的特征,特征数据通过全连接层得到输出。由于这是一个完全监督的学习过程,输出由训练数据中的标记来直接决定。
自动泊车过程
如果上一步的搜索驾驶过程找到了可用的停车位后,系统就会调用自动泊车过程。一般来说,我们会使用路径生成方法实现自主泊车过程。目前主流的路径生成方法主要有基于算法的方法以及基于强化学习的方法。
基于算法的方法涉及计算停车位的位置和形状的路径以及车辆的当前位置。算法为了计算出合适的停车路径会涉及最优控制问题、基于网格的路径规划方法以及快速探索随机树等算法。
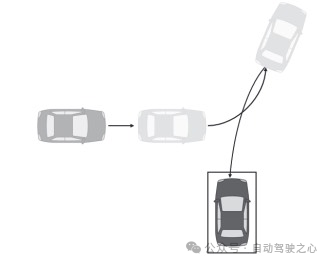
基于强化学习的方法可以为自动泊车模拟器中的自主停车过程生成最优路径。在自动泊车模拟器中,车辆会学习一个通用的停车过程。该学习方法通过重复路径的生成过程和评估来不断获得停车精度最高的最优路径,如下图所示。
返回驾驶过程
返回驾驶过程是指在自动驾驶车辆驶入停车位进行等待的时候,用户可以对车辆进行调用,使其移动到用户指定好的地方。在这个过程当中,我们需要使用到路径跟踪技术。
目前而言,路径跟踪技术包括跟踪行进路径的方法以及跟踪修改路径的方法。但是这两种方法都使用了类似的车辆控制算法,具体可以参考论文【1-2】。其大体思路就是在考虑车辆当前位置和转向角条件的情况下,执行沿着生成路径移动车辆的控制命令。
结论
由于目前自动泊车技术的需求逐渐增加,各个国家和厂商都在大力发展自动泊车系统。考虑到自动泊车技术的快速发展,在这篇文章中,我们总结了自动泊车系统当中的标准化趋势、评测标准以及自动泊车各个组成系统的进行详细的介绍,希望可以给大家带来帮助~
参考文章
【1】A Trajectory Planning Method for Autonomous Valet Parking via Solving an Optimal Control Problem.
【2】Hierarchical Control of Trajectory Planning and Trajectory Tracking for Autonomous Parallel Parking.
【3】SURVEY OF TECHNOLOGY IN AUTONOMOUS VALETPARKING SYSTEM.
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2400人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









