






点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
论文作者 | 自动驾驶Daily
编辑 | 自动驾驶之心
Arxiv:https://arxiv.org/abs/2407.16988
Project page: https://xiaobiaodu.github.io/dreamcar-project/
Code: https://github.com/xiaobiaodu/DreamCar
以上是我们提出的方法DreamCar 在实际应用场景中的效果。
摘要
自驾行业通常雇用专业艺术家来制作精美的3D汽车模型。然而,制作大规模的数字资产成本高昂。由于已经有许多包含大量汽车图像的数据集,我们专注于从这些数据集中重建高质量的3D汽车模型。然而,这些数据集只包含前行场景中汽车的一侧图像。我们尝试使用现有的生成模型提供更多的监督信息,但由于这些模型是在合成数据集上训练的,而不是专门针对汽车的数据集,因此难以在汽车上泛化。此外,在处理野外图像时,由于相机姿态估计的误差较大,重建的3D汽车纹理会出现错位。这些限制使得以前的方法难以重建完整的3D汽车。为了解决这些问题,我们提出了一种新方法,名为DreamCar,能够在给定少量图像甚至单张图像的情况下重建高质量的3D汽车。为了使生成模型更具泛化性,我们收集了一个名为Car360的汽车数据集,包含超过5600辆汽车。利用这个数据集,我们使生成模型对汽车更加鲁棒。我们使用特定于汽车的生成先验,通过分数蒸馏采样来引导重建。为了进一步补充监督信息,我们利用汽车的几何和外观对称性。最后,我们提出了一种姿态优化方法,通过校正姿态来解决纹理错位问题。大量实验表明,我们的方法在重建高质量3D汽车方面显著优于现有方法。
以上是我们提出的方法DreamCar 在nuscenes 数据集中重建大量3D汽车的效果。
方法
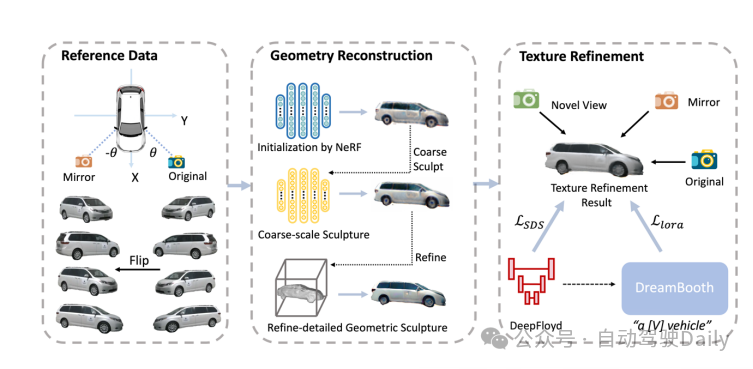
我们提出的方法DreamCar,通过利用多种关键技术从有限数量的图像中重建高质量的3D汽车模型。首先进行图像分割和镜像操作,以创建额外的训练视图,然后使用Nuscenes等数据集估算和优化相机姿态。该方法采用逐步由粗到细的几何重建方法,使用NeRF、Neus和DMTET等模型,并结合法线和深度图约束以确保精度。纹理优化通过生成模型和DreamBooth实现,以获得逼真的结果,并使用PoseMLP优化相机姿态以纠正纹理错位。
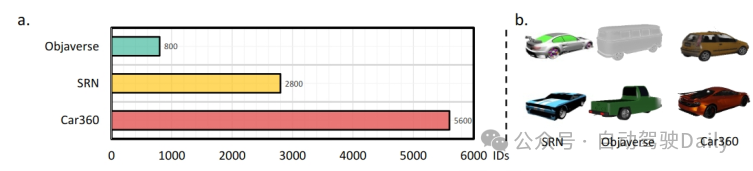
提出的Car360 数据集
本研究旨在从有限数量的图像(通常为一到五张)中重建完整的3D模型。然而,仅依靠这些监督信息是不够的。因此,我们在方法中集成了最近的大规模3D感知扩散模型Zero-123-XL的生成先验。我们发现,由于该模型在大规模合成数据集(如Objaverse)上训练,而不是专门针对汽车的数据集,因此在实际的汽车主题上难以泛化。在本研究中,我们收集了一个名为Car360的汽车数据集,其中包含5600辆合成汽车,以增强我们的模型在实际汽车上的鲁棒性。
以上是我们提出的方法DreamCar 对比现有sota方法的效果。我们做了多项实验表明DreamCar 具有很好的重建效果 且优于现有的sota 方法。代码已经开源,欢迎大家follow!
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!重磅,自动驾驶之心科研论文辅导来啦,申博、CCF系列、SCI、EI、毕业论文、比赛辅导等多个方向,欢迎联系我们!
① 全网独家视频课程
BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 网页端官网:www.zdjszx.com
网页端官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
国内最大最专业,近3000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦感知、定位、融合、规控、标定、端到端、仿真、产品经理、自动驾驶开发、自动标注与数据闭环多个方向,目前近60+技术交流群,欢迎加入!扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】全平台矩阵


















 1600
1600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









