






这一年,自动驾驶之心感慨技术发展太快了!去年还是BEV感知、无图NOA,今年就进入了端到端、大模型大规模量产元年。今天就和大家盘一盘今年比较火的技术方向!
端到端自动驾驶
端到端的优势非常突出,但仍然有很多难点需要攻克。主要在于数据难定义、数据难制作、网络不好训练、模型不好解释优化、评测定义多种多样!很多公司无法像特斯拉一样获取海量数据,这也是个巨大的瓶颈。今年年中,自动驾驶之心收到了很多同学关于端到端实战相关的需求,虽然我们已经筹备过相关的内容,但早期端到端方案不够成熟,更多是以论文切入。工业界使用的方案关注较少,代码层面上也很少提及。
自动驾驶之心在调研大家的需求后,联合自动驾驶之心课研团队,出品了国内首个《面向工业级的端到端自动驾驶算法与实战》,主讲老师是一线头部自动驾驶公司端到端算法工程师。大纲如下:


自动驾驶与多模态大模型
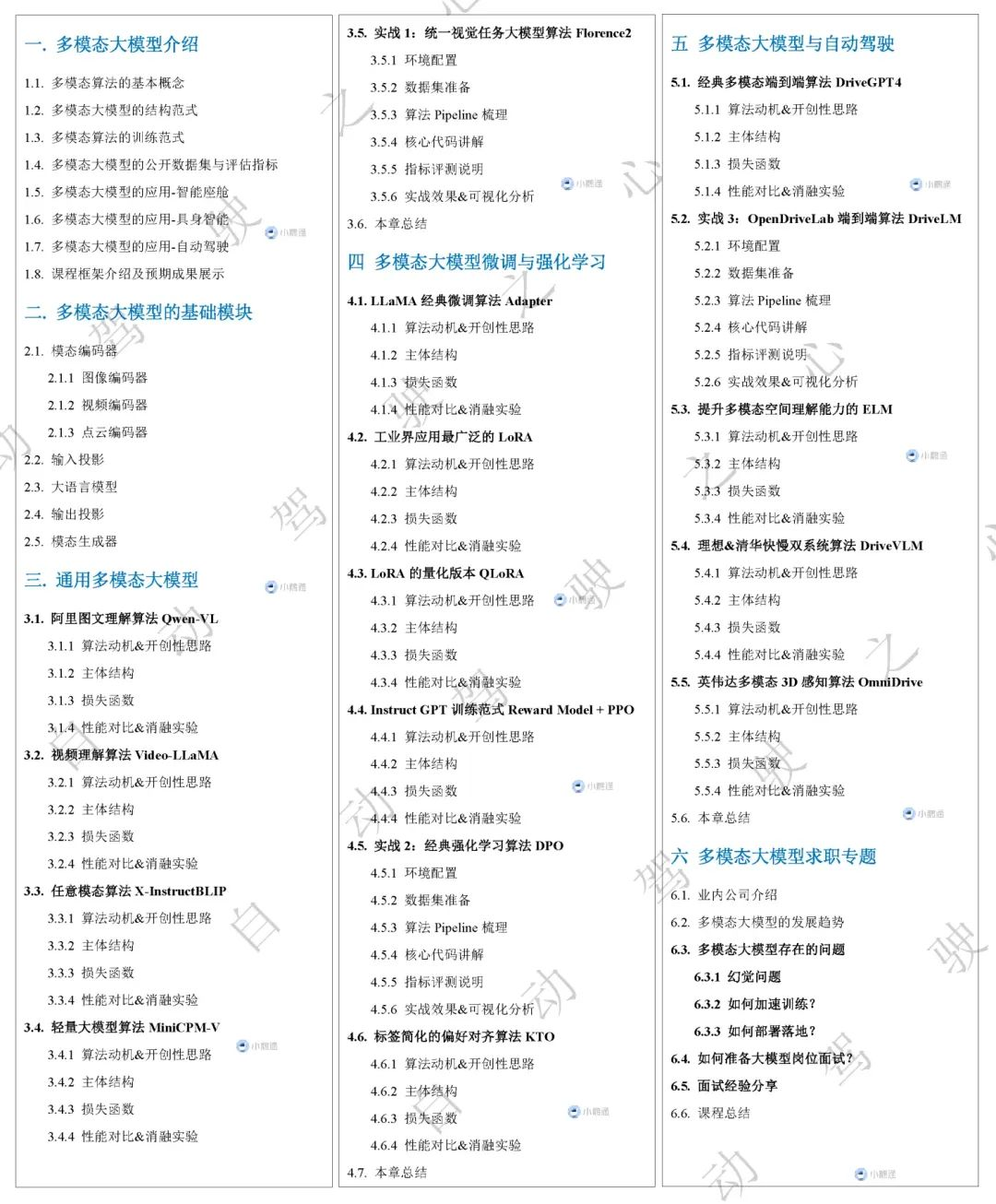
可以说国内端到端的技术路线已经明确:端到端+大模型!大语言模型结合自动驾驶作为新兴技术领域,展现着巨大的潜力和影响。这种前沿技术对于快速学习和深入理解提出了挑战,自动驾驶之心进一步打造了自动驾驶多模态大模型实战教程。
该课程旨在为大家提供一个系统化的学习平台,从通用多模态大模型,到大模型微调,最终在聚焦在端到端自动驾驶多模态大模型。这个课程的目的是帮助学习者更好地适应实际工作需要,为其进一步地发展和应用打下扎实的基础,课程大纲如下:

具身智能
前十年自动驾驶,后十年具身智能!
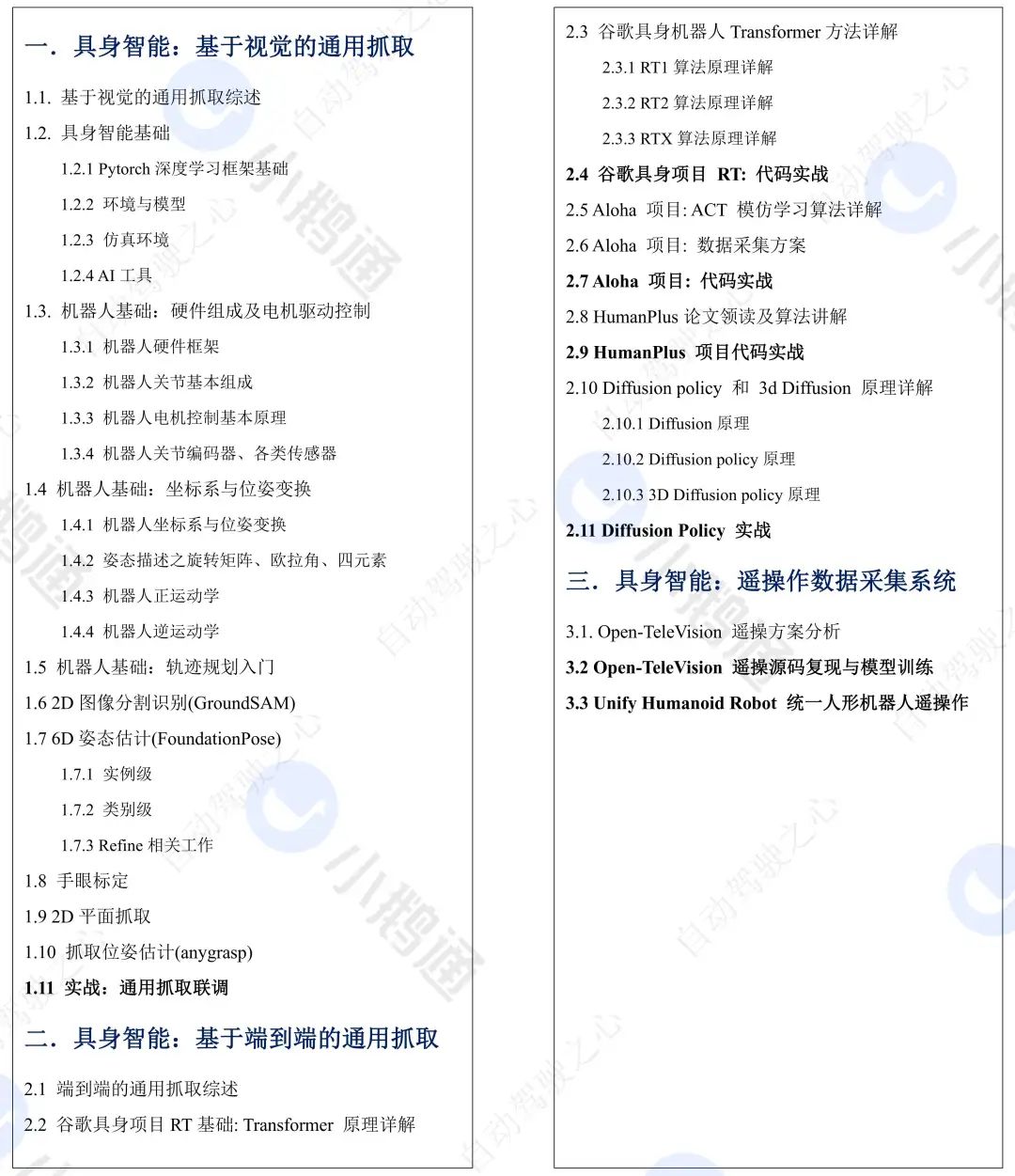
如果说2024年,什么领域最受欢迎,我相信大家会异口同声地喊出:具身智能。具身智能广义上是指具有物理身体的智能体,能够与环境进行互动,感知周围世界,自主学习、决策并执行任务。像人形机器人、四足机器人、机械臂系统、自动驾驶系统算广义上的具身智能,能够感知周围环境并作出反应或执行。GPT这类大模型从狭义上理解,当然也可以算。识点琐碎,系统也比较复杂,如果没有比较好的教程带着入门,往往会踩坑,后期不知道怎么学习。为此我们联合业界知名的机器人系统与算法专家,联合展开了业内首门具身智能理论与实战课程,让大家真正能够学得透彻,后期配有代码讲解,助力大家真正从实现的角度上搞懂算法。课程大纲:

自动驾驶与C++
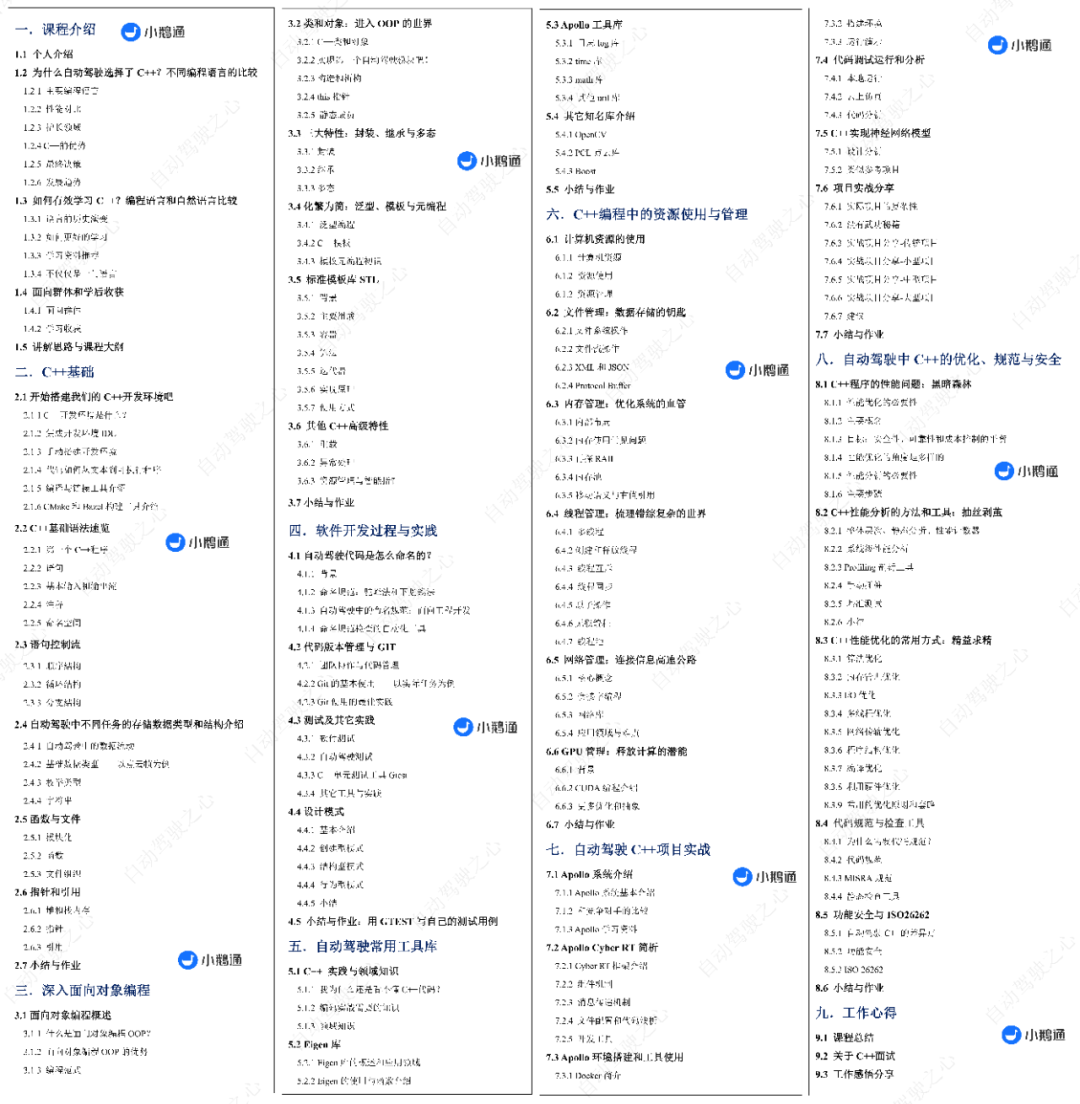
近40 年以来,C++以其高性能、灵活、稳定和强大的底层支持而闻名。运行速度快、对硬件高效访问、可以实现复杂的计算和控制算法,因此始终是信息行业的热门语言。
自动驾驶和机器人系统的第一要求是安全和稳定,这也是为什么在自动驾驶和机器人系统中,C++几乎是最重要的编程语言。为此自动驾驶之心联合业内C++开发专家,打造了一套行业内最系统的C++课程!就关注三个点:工作技能、求职面试、小白入门;从基础到进阶,从入门到精通。课程大纲如下:

离不开的仿真闭环
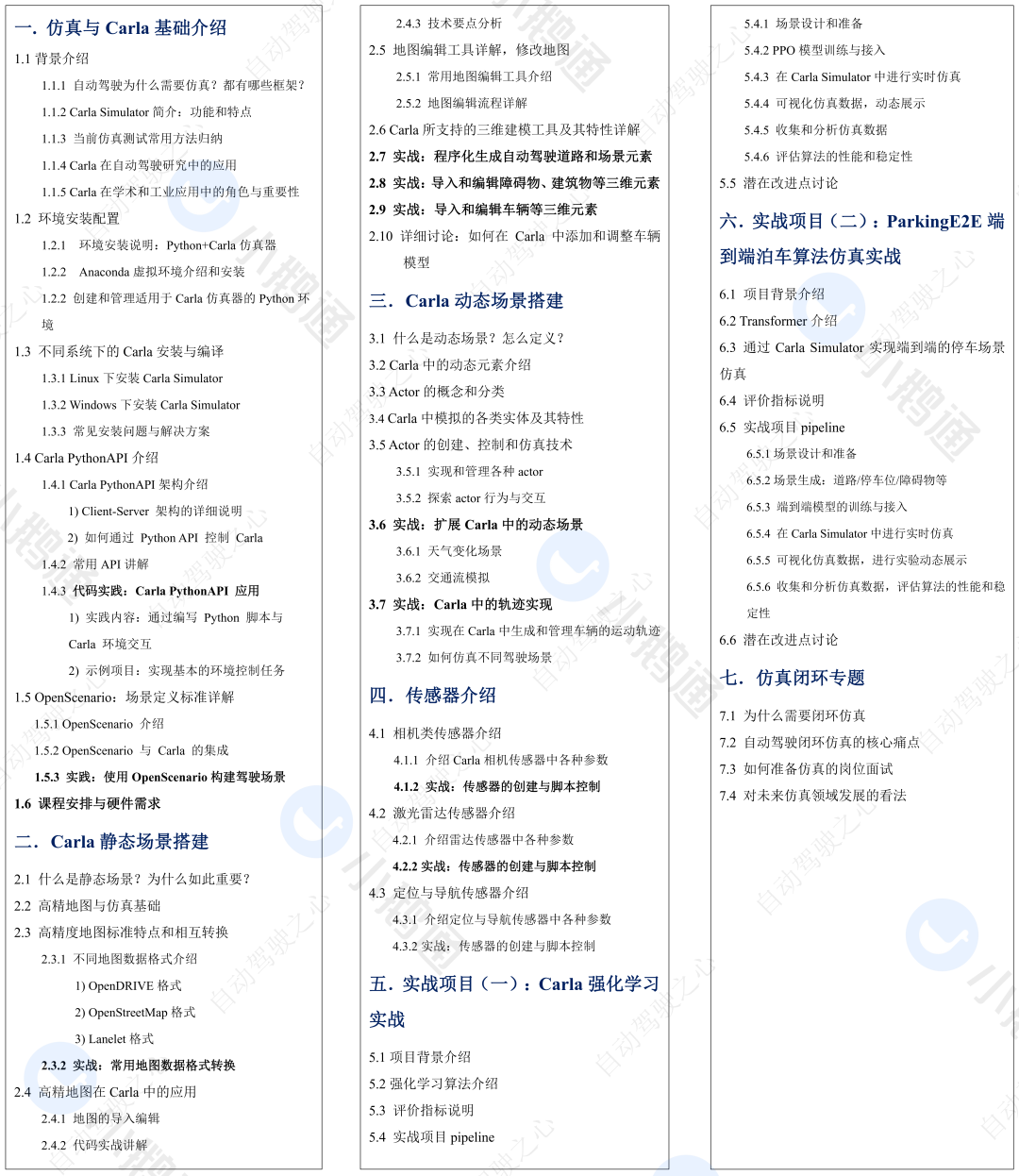
在各种自动驾驶社区和技术讨论群中,关于CARLA的问题经常被提起。这反映出,尽管仿真是自动驾驶开发中的关键环节,然而,由于其涉及的知识面广泛、内容复杂,许多开发者,尤其是初学者,常常感到无从下手。除了需要理解各类仿真工具的使用,还要掌握传感器模拟、UE渲染引擎、高精地图应用等多领域的知识。
为此自动驾驶之心联合业内知名仿真专家共同研发了一门面向工业级的Carla仿真项目实战课程。本课程将通过项目实战的方式,帮助大家将这些看似零散的知识点有机串联起来,逐步建立起系统的理解。学员不仅会学习如何在CARLA环境中进行场景设计、传感器设置和仿真地图生成,还会探索如何结合深度学习进行感知算法的训练和测试。此外,课程还会针对实际操作中经常遇到的挑战提供实用的解决方案。大纲一览:

课程咨询
欢迎咨询小助理



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









