






点击下方卡片,关注“具身智能之心”公众号
具身智能方向的毕业生能做什么?别急,具身智能之心在此为大家调研了秋招岗位信息,包括校招、实习的共性岗位职责与要求,按照算法类、研究类、开发类、硬件类、机械类、管理类汇总如下,供大家参考!
1 算法类
共性岗位职责
前沿算法研究与跟踪:参与工业 / 学术界相关领域前沿算法的跟踪与复现,研究如具身智能大模型、机器人运动控制、操作算法、多模态大模型等方向的前沿算法。
算法开发与优化:进行算法功能开发和优化,包括开发推理引擎、高性能算子,进行模型压缩技术研究等,提升算法性能与效率,涉及语言模型算法、机器人相关算法(如运动控制、灵巧操作等)。
模型训练与部署:负责模型训练、评估和优化,包括数据生成、处理,实现算法在实物机器人或仿真环境中的部署,如在人形机器人、四足机器人、机械臂、灵巧手等平台上的部署,部分岗位涉及多模态大模型、深度学习模型等的训练与部署。
项目协同与推进:协同工程等团队推动项目进展,包括真机部署、开源开放、创新应用展示等,参与项目中的算法框架设计、维护,数据平台搭建、优化,系统架构设计与开发等工作,部分岗位涉及机器人平台、AI 平台开发等。
共性岗位要求
学历背景:本科及以上学历,多要求硕士或博士学位,相关专业涵盖计算机、人工智能、机器人、自动化、电子信息、数学、物理等。
专业技能
编程语言:熟练掌握 Python、C++ 等常用编程语言,部分岗位需掌握特定语言如 Golang。
框架与工具:熟悉常用的深度学习框架(如 PyTorch、TensorFlow 等)、机器人操作系统(如 ROS)、仿真软件(如 Pybullet、NVIDIA Isaac、IsaacGym/Sim、Mujoco 等)、数据库(如 MySQL)、缓存技术(如 Redis)、容器技术(如 Docker)、大数据相关系统(如 Hadoop/Spark/Hive/HBase 等),部分岗位要求掌握 CUDA、CUTLASS 等高性能计算相关技术。
算法基础:具备扎实的算法、数学、机器学习、深度学习、强化学习等理论基础,熟悉数据结构、设计模式,了解机器人学相关知识(如运动学、动力学等)。
项目经验:有相关项目经验者优先,如实物机器人项目经验(如机械臂、灵巧手、四足机、人形机器人等)、算法优化项目经验、开源项目贡献经验、数据集和基准搭建经验、特定领域项目经验(如生物医药、自动驾驶等)。
论文发表与竞赛获奖:在顶级学术会议(如 CVPR、ICCV、NeurIPS、ICLR、RSS、CoRL、ICRA、IROS、OSDI、MICRO、MLSYS、HPCA、ISCA 等)或期刊发表论文者优先,在相关竞赛(如 Robomaster、Robocup、CCPC、ACM/ICPC 等)获奖经历者优先。
其他能力:具备良好的沟通能力、团队合作精神、问题分析与解决能力、快速学习能力、自驱力、创新精神等,部分岗位要求具备良好的英文阅读与写作能力。
研究方向
具身智能大模型:涉及框架设计、模型优化、数据生成、下游任务微调与部署、持续学习优化等方面,包括推理加速、高性能算子开发、模型压缩技术研究等。
具身智能 AIGC:专注于三维重建与生成前沿算法,如三维场景重建、几何处理、三维物体生成、人体生成和运动捕捉等,涵盖数据处理、算法框架设计与优化等工作。
机器人运动控制与操作:针对人形机器人、四足机器人运动控制算法以及机械臂、灵巧手的灵巧操作算法展开研究,涉及实物部署与高水平学术论文发表。
多模态大模型:围绕基于 C++/Python 语言的推理引擎开发,针对 LLM/VLM/MLLM/Stable Diffusion/OpenSora 等深度学习模型进行推理加速、算子优化、模型压缩等工作,熟悉多模态大模型结构及相关优化技术原理。
感知算法:包括物体识别、分割、追踪等感知算法设计、开发、测试、集成和调试,以及针对机器人交互任务设计、训练、集成大模型,搭建神经网络训练和部署框架,进行数据处理流程相关工作。
强化学习与模仿学习:应用于机器臂 / 机械手研发,涉及算法功能开发和优化、sim2real 工作、数据收集与实机测试,以及在机器人运控与操作、现实世界强化学习、具身智能大模型等方向提升模型能力。
仿真平台算法:推动具身智能研究项目在仿真中的迭代,如具身控制、大模型驱动的智能体、Sim - Real transfer、仿真算法研发等,包括算法原型实现、训练、测试和优化,数据采集和处理,以及跨平台迁移等工作。
物理仿真算法:研究高性能物理仿真算法,开发并维护高保真物理仿真平台,支持多物理场景模拟和复杂交互行为仿真,涉及算法验证、性能优化、技术文档撰写,以及图形学物理仿真及渲染技术和算法应用等。
人体运动策略:研究通用的人体运动仿真与控制策略,如数字人、人型机器人、灵巧手等的运动控制,包括动作先验的表征及其生成、多模态理解和控制,以及智能体间交互的仿真与控制。
2 研究类
共性岗位职责
前沿算法研究:从事相关领域前沿算法研究,如具身智能大模型、AIGC、足式机器人运控、机械臂操作、表征学习、强化学习、仿真平台、物理仿真、人体运动策略等方向算法研究。
跟踪与评估进展:跟踪和评估所在领域最新研究进展,及时掌握行业动态。
算法框架设计与优化:负责算法框架设计、迭代、维护和优化,提升算法性能与效果。
项目协同推动:协同工程等团队推动项目进展,包括真机部署、开源开放、创新应用展示等,促进研究成果转化。
共性岗位要求
学历背景:博士学位(部分岗位硕士及以上),相关专业涵盖计算机、人工智能、机器人、自动化、电子信息、数学、物理等。
专业技能
编程语言:熟练掌握 Python、C++ 等,部分岗位涉及其他语言。
框架与工具:熟悉深度学习框架(如 PyTorch)、机器人操作系统(如 ROS)、仿真软件(如 IsaacGym/Sim、PyBullet、Mujoco 等)、特定开发库(如 PhysX、Bullet)及相关技术(如 CUDA、OpenCL)。
算法基础:具备扎实的机器学习、深度学习、强化学习等算法基础,熟悉相关理论知识。
项目经验:有相关项目经验者优先,如机器人项目、算法研究项目、数据集和基准搭建项目等。
论文发表:在顶级学术会议(如 CVPR、ICCV、NeurIPS、CoRL、RSS、ICRA、IROS 等)或期刊发表论文者优先。
其他能力:具备良好的沟通协作能力、问题分析与解决能力、快速学习能力、自驱力、创新精神等,部分岗位对代码规范、英文阅读写作能力有要求。
研究方向
具身智能大模型:框架设计、模型优化、数据生成、下游任务应用、持续学习优化等。
具身智能 AIGC:三维重建与生成,包括场景重建、几何处理、物体与人体生成、运动捕捉等。
足式机器人:运控算法研究、仿真平台搭建、算法落地应用。
机械臂操作:前沿算法研究、操作技术路线优化、算法在机器人平台的落地应用。
表征学习:相关算法研究、预训练算法设计、前沿算法跟踪与复现。
强化学习:机器人运控与操作相关前沿技术研究、算法在具身智能方向的落地应用、现实世界强化学习研究。
仿真平台:具身智能研究项目在仿真中的迭代、算法框架规划与维护、特性算法研发。
物理仿真:高性能物理仿真算法研究、平台开发与维护、技术应用与创新。
人体运动策略:人体运动仿真与控制策略研究、动作先验相关研究、智能体交互仿真与控制。
3 开发类
共性岗位职责
系统开发与维护
负责机器人系统或相关产品的软件、硬件开发与维护工作,涵盖设计、编码、测试、调试等环节,如机器人系统软件框架开发、硬件产品研发设计等。
参与产品的需求分析、方案设计、原型制作、测试验证等全流程工作,确保产品的完整性和可靠性。
性能优化与问题解决
针对开发任务,进行性能优化工作,包括计算任务优化、算法优化、系统架构优化等,提升产品或系统的性能和效率,如提升机器人端计算任务执行效率、优化后端服务性能等。
负责解决产品开发和使用过程中出现的技术问题,如硬件调试、软件故障排查、算法问题修复等,确保产品稳定运行。
协同工作与技术跟进
与其他团队(如传感器研发团队、工程团队、算法团队等)密切协作,共同完成项目任务,如与传感器研发人员协作进行标定、测试工作,协同算法团队推动算法在实际场景中的应用等。
跟踪行业技术发展动态,学习并应用新技术,提升自身技术水平,保持产品或系统的技术竞争力,如跟踪机器人领域最新技术、学习新的开发框架和工具等。
共性岗位要求
学历与专业背景
本科及以上学历,相关专业包括计算机、软件、网络安全、电子、通信、控制、机械、自动化、机器人等专业,具体根据岗位而定,如 C++ 开发工程师多要求计算机相关专业,嵌入式开发工程师要求电子、通信、控制等专业。
技能要求
编程语言:熟练掌握相关编程语言,如 C++、Python、Golang 等,不同岗位对特定语言有重点要求,如 C++ 开发工程师需精通 C++,GO 开发工程师要熟悉 Golang。
开发工具与环境:熟悉常用的开发工具、操作系统、数据库、容器技术等,例如熟悉 Linux 操作系统、MySQL 数据库、Docker 容器技术,掌握电路设计软件(如 Altium Designer)、PCB 设计软件等相关硬件开发工具(针对硬件研发岗位)。
算法与数据结构:了解常见的数据结构和算法,能够运用其解决实际问题,如在软件开发中优化代码逻辑、在算法设计中提高效率等。
项目经验与竞赛经历
有相关项目经验者优先,如机器人项目开发经验、嵌入式系统开发经验、分布式系统设计经验等,具体项目经验要求与岗位相关,如嵌入式开发工程师要求有实际开发经验,C++ 开发工程师有 C++ 开发项目经验优先。
相关竞赛获奖经历者优先,如 Robomaster、Robocup、CCPC 等竞赛获奖经历,体现个人的专业能力和实践水平。
其他能力
具备良好的团队合作精神和沟通能力,能够与不同团队成员有效协作,共同推进项目进展。
有较强的分析和解决问题的能力,能够快速定位并解决开发过程中遇到的各种问题。
学习能力强,能够快速掌握新知识、新技术,适应行业发展变化。
对工作充满热情,有责任心,积极主动承担工作任务,如硬件研发工程师需对硬件开发工作有热情,积极参与产品研发各个环节。
技术方向
机器人技术应用
专注于机器人相关技术的开发与应用,如机器人系统软件研发、硬件设计(包括电路、PCB、线束设计等)、运动控制算法开发、传感器算法开发、机器人平台开发等,旨在提升机器人的性能、功能和智能化水平。
云计算与分布式系统
涉及云服务开发(如 K8S 云服务)、分布式系统设计、云边端一体化架构开发等,通过运用相关技术(如 Golang 语言、分布式系统理论、容器技术等)实现高效的云计算服务和系统架构,提高系统的可扩展性、可靠性和性能。
人工智能技术融合
在开发过程中融合人工智能技术,如实现 AI 模型优化(包括压缩、剪枝、量化等)、边端 AI 推理与硬件加速、利用深度学习框架进行算法开发等,推动人工智能技术在实际产品或系统中的落地应用,提升智能化程度。
4 硬件类
共性岗位职责
硬件设计与开发
负责硬件产品的设计工作,包括电路设计、PCB 设计、线束设计等,如具身智能硬件实习生参与机器人控制系统硬件设计,硬件研发工程师负责公司硬件产品的整体研发设计。
进行硬件调试工作,确保硬件系统的正常运行,及时发现并解决硬件问题,保证产品的稳定性和可靠性。
项目参与与协作
参与产品相关的项目工作,如参与产品的需求分析、方案设计、原型制作、测试验证等环节,确保硬件与软件及其他部分的协同工作,如硬件研发工程师在产品开发全过程中与多团队协作。
协助其他团队完成相关任务,如具身智能硬件实习生协助算法工程师进行仿真环境构建和真机算法测试,与传感器研发人员协作完成相关工作(如硬件研发工程师参与传感器标定、测试、优化及转产工作)。
技术跟踪与优化
跟踪行业技术发展动态,关注硬件领域新技术、新器件的发展,不断提升产品的技术水平,如硬件研发工程师需持续学习新的硬件技术。
对硬件产品进行性能优化和可靠性测试,提高产品性能,确保产品质量,如硬件研发工程师负责产品性能优化和可靠性测试工作。
共性岗位要求
学历背景
本科及以上学历,相关专业涉及电子、机械、计算机、自动化、人工智能、机器人等专业,如具身智能硬件实习生要求相关专业本科在读及以上学历,硬件研发工程师要求电子工程、电气工程、计算机工程或相关领域学士及以上学位。
专业技能
硬件设计与开发技能:熟练掌握电路设计、PCB 设计、硬件调试等技能,熟悉常用 EDA 软件(如 Altium Designer、PADS 等),了解单片机工作原理、常规 DC - DC 电源工作原理,如硬件研发工程师需具备这些硬件开发能力。
相关工具使用能力:掌握相关工具软件及测试仪器仪表的使用,如硬件研发工程师需熟练使用电路设计、仿真、调试等工具。
其他技能(部分岗位要求):具备一定编程能力(如掌握 python/C++ 等编程语言),熟悉机器人硬件知识,了解机器人控制原理,如具身智能硬件实习生需熟悉常见机器人硬件知识。
项目经验与实践能力
有硬件研发相关项目经验者优先,如具身智能硬件实习生有真实机器人真机实验经历者优先,硬件研发工程师有硬件研发项目经验优先考虑。
具备良好的工程基础和实验能力,动手能力强,如硬件研发工程师要求具备良好硬件调试能力和动手能力。
其他要求
对机器人行业感兴趣,愿意在具身智能机器人方向深耕,了解并热爱机器人行业,如具身智能硬件实习生和硬件研发工程师都需具备此行业热情。
研究方向
机器人硬件系统研发
主要研究方向为机器人硬件系统的设计与开发,包括机器人控制系统硬件设计、机械臂、人形机器人等数据采集设备搭建等,致力于提升机器人硬件的性能、稳定性和可靠性,使其满足机器人在各种应用场景下的功能需求。
硬件技术在具身智能中的应用
聚焦于将硬件技术应用于具身智能领域,如参与具身智能机器人相关硬件设计、调试和验证工作,确保硬件与具身智能算法的有效结合,推动具身智能机器人的发展,实现硬件技术在智能机器人系统中的创新应用。
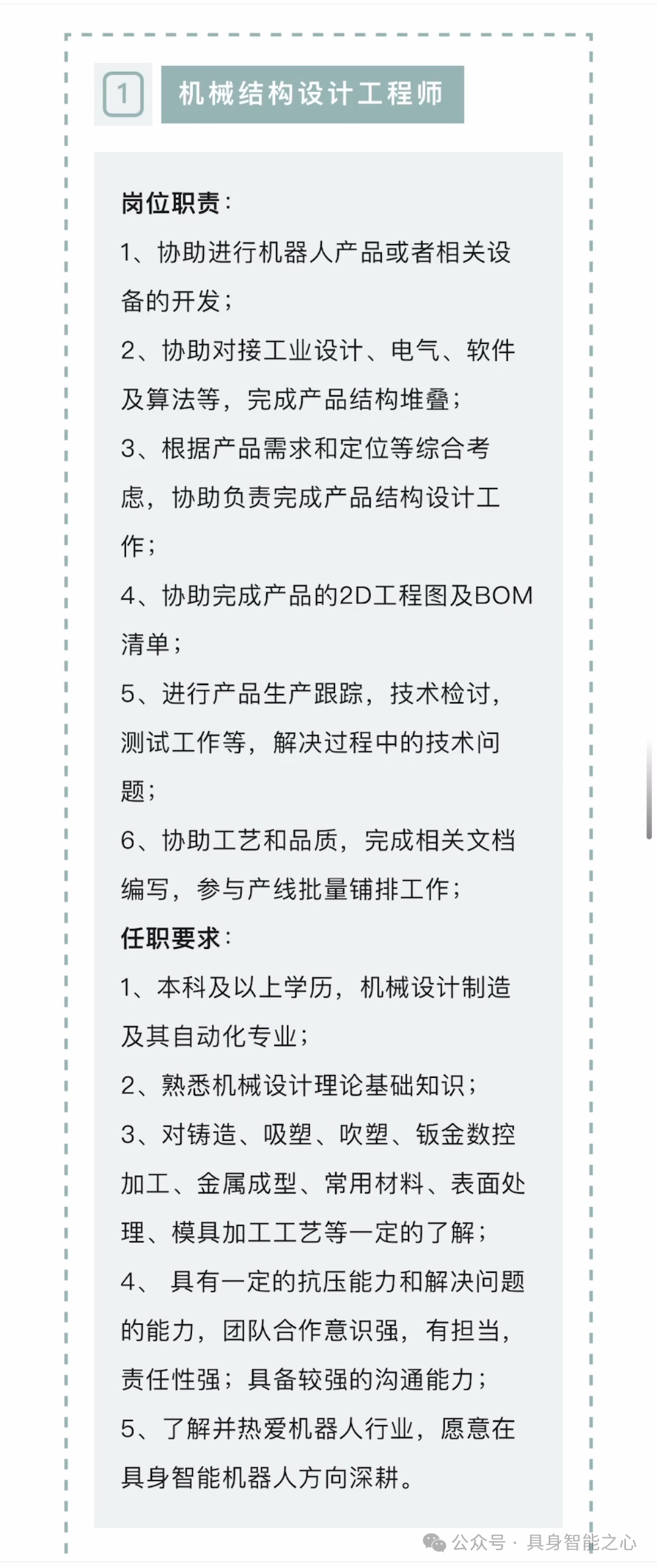
5 机械类
共性岗位职责
产品开发协助:协助进行机器人产品或相关设备的开发工作,包括参与结构设计、与多部门对接协作等,如机械结构设计工程师协助完成产品从结构设计到生产的一系列流程,配合高性能物理仿真算法研究及相关平台开发工作。
技术问题解决与优化:解决产品开发和生产过程中的技术问题,进行性能优化工作,如机械结构设计工程师负责产品生产跟踪、技术检讨和测试工作,解决技术问题;协助进行算法验证、性能优化和技术文档撰写,参与物理仿真平台的日常维护与问题解决。
文档编写与项目参与:编写相关技术文档,参与项目的部分流程工作,如机械结构设计工程师协助编写工艺和品质相关文档,参与产线批量铺排工作;配合研究项目的实验开展,参与论文撰写和专利申请等工作。
共性岗位要求
学历专业背景
本科及以上学历,机械类岗位通常要求机械设计制造及其自动化等相关专业,如机械结构设计工程师要求该专业背景;要求计算机科学、物理学、机械工程、应用数学或相关专业背景。
专业技能与知识
机械类岗位需熟悉机械设计理论基础知识,了解各类机械加工工艺、材料等知识,如机械结构设计工程师要熟悉铸造、吸塑、吹塑、钣金数控加工、金属成型、常用材料、表面处理、模具加工工艺等;需要对物理仿真领域的核心算法有一定理解,精通至少一种编程语言(如 C++、Python)及相关仿真库(如 PhysX、Bullet、Mujoco),能够运用 CUDA 或 OpenCL 等技术进行并行计算加速,具备高性能计算优化经验。
部分岗位要求具备一定编程能力,如机械结构设计工程师虽未重点强调,但在与其他部门协作过程中可能涉及编程相关知识的运用;则明确要求具备较强编程能力,以进行算法实现和平台开发工作。
能力素质
具备一定的抗压能力、问题解决能力和团队合作精神,如机械结构设计工程师需具备这些能力以应对产品开发过程中的各种挑战;要有良好的问题分析能力、学习能力、沟通协作能力和逻辑思维能力,以便在算法研究和项目推进中发挥积极作用。
对工作领域有热情,愿意在相关方向深耕,如两个岗位都要求了解并热爱机器人行业,其中机械结构设计工程师希望在具身智能机器人方向发展,则需对物理仿真技术在具身智能领域的应用有兴趣。
研究方向
机械结构设计与优化:主要研究方向为机器人或相关设备的机械结构设计,包括结构堆叠、整体设计、2D 工程图绘制、BOM 清单编制等,致力于提升机械结构的合理性、可靠性和功能性,确保产品能够满足性能要求并顺利实现量产,如机械结构设计工程师的工作重点。
物理仿真算法研究与应用:聚焦于高性能物理仿真算法的研究,开发和维护物理仿真平台,涉及算法优化创新、多物理场景模拟、复杂交互行为仿真、算法验证与性能优化、技术文档撰写以及与其他团队协作等工作,旨在通过先进的物理仿真技术为机器人等系统提供更精确的模拟和优化手段,推动相关技术在具身智能领域的应用。
6 管理类
共性岗位职责
团队管理与领导:负责建立和领导团队,制定团队发展策略和目标,管理团队日常工作,包括人员分工、任务分配、工作进度跟踪等,确保团队高效运作,如硬件研发负责人需建立并领导研发及生产团队,系统架构 Infra Leader 负责 Infra 团队的日常管理及项目落地。
业务规划与决策:根据市场需求、行业动态和公司战略,制定相关业务领域的规划和决策,如硬件研发负责人要负责核心技术路径、关键技术方向的制定,规划产品路线图和发展策略;产品经理负责制定产品的规划和路线图,明确产品定位、目标用户、功能特性和发展阶段。
项目管理与推进:主导或参与项目的全流程管理,包括项目计划制定、资源协调、进度控制、风险管理、问题解决等,确保项目按时、高质量完成,如硬件研发负责人参与产品从设计到量产的各个环节管理,产品经理负责制定产品开发计划和项目进度表,监控项目进展并解决问题。
跨部门协作与沟通:与公司内部其他部门(如研发、设计、测试、销售、业务等)紧密合作,协调资源,沟通需求,解决问题,促进信息共享和协同工作,保证公司整体业务的顺利推进,如数据平台 Leader 需与业务部门合作,产品经理要与多个部门保持密切沟通协作。
共性岗位要求
学历与经验
本科以上学历,不同岗位对工作经验要求不同,硬件研发负责人要求 5 年以上研发及生产制造工作经验,具备一定规模团队管理经验;数据平台 Leader 要求 8 年以上数据平台开发经验;系统架构 Infra Leader 要求本科毕业 5 年以上、硕士毕业 3 年以上或博士毕业 1 年以上相关工作经验;产品经理要求 3 年以上机器人产品经理或相关工作经验。
专业技能与知识
具备相关专业领域的深厚知识,如硬件研发负责人需精通机械结构及传动、电气及运动控制等专业理论知识;数据平台 Leader 要精通分布式系统的基础理论、大数据相关系统及工具;系统架构 Infra Leader 需精通 linux 系统、脚本开发、CI/CD 工具、熟悉各种前后端开发框架等;产品经理需熟悉机器人的开发流程和技术体系,了解强化学习算法等。
部分岗位要求掌握特定工具或技术,如数据平台 Leader 需精通 python 全栈(前端 vue,后端 flask)、java 全栈,熟悉相关数据库、缓存技术、容器技术等;系统架构 Infra Leader 熟悉 docker 等。
能力素质
具备良好的团队领导能力和沟通协调能力,能够有效地管理团队、指导成员、协调资源、解决冲突,如各个管理岗位均强调此能力。
具有优秀的问题分析和解决能力,能够迅速识别业务中的问题,提出解决方案并推动实施,如硬件研发负责人解决产品结构设计及量产问题,数据平台 Leader 处理复杂数据问题等。
具备较强的学习能力和创新意识,能紧跟行业发展趋势,不断更新知识和技能,勇于尝试新方法、新思路,如投资总监岗位要求具备快速学习和自我驱动能力,产品经理要有创新精神和创业意识等。
具备良好的时间管理和执行能力,确保工作任务按时完成,如投资总监岗位强调时间观念,硬件研发负责人注重执行能力等。
研究方向
管理类岗位主要负责团队管理、业务规划与项目推进,虽涉及技术领域但并非专注于特定技术研究方向
硬件研发管理:主要负责硬件产品研发团队的管理和硬件产品的全生命周期管理,包括制定硬件研发策略、规划产品路线图、组织团队进行产品设计开发、优化产品性能、确保产品可量产性等,涉及硬件技术选型、结构设计、生产制造等多方面工作,如硬件研发负责人岗位。
数据平台管理与数据驱动业务:专注于数据平台的设计、开发与优化,通过标准化和平台化相关工具,实现数据处理流程的优化和效率提升,推动数据驱动的业务发展,如自动驾驶数据闭环管理,涉及数据架构设计、大数据系统及工具应用、算法挖掘等工作,如数据平台 Leader 岗位。
系统架构管理与技术创新:负责系统架构相关的基础工具链开发与维护,涵盖基础系统、研发工具、数据 / 仿真 / 测试工具开发等,同时进行机器人软件架构设计与开发,关注行业新技术应用,确保系统高效运行和项目落地,如系统架构 Infra Leader 岗位。
产品管理与市场导向:以市场需求为导向,结合技术发展趋势,进行产品规划与设计,管理产品项目的全流程,包括技术与市场调研、制定产品策略、协调团队资源推动产品开发、控制项目进度和质量等,注重提升产品性能和用户体验,确保产品符合市场需求和公司战略,如产品经理(强化学习方向)岗位。
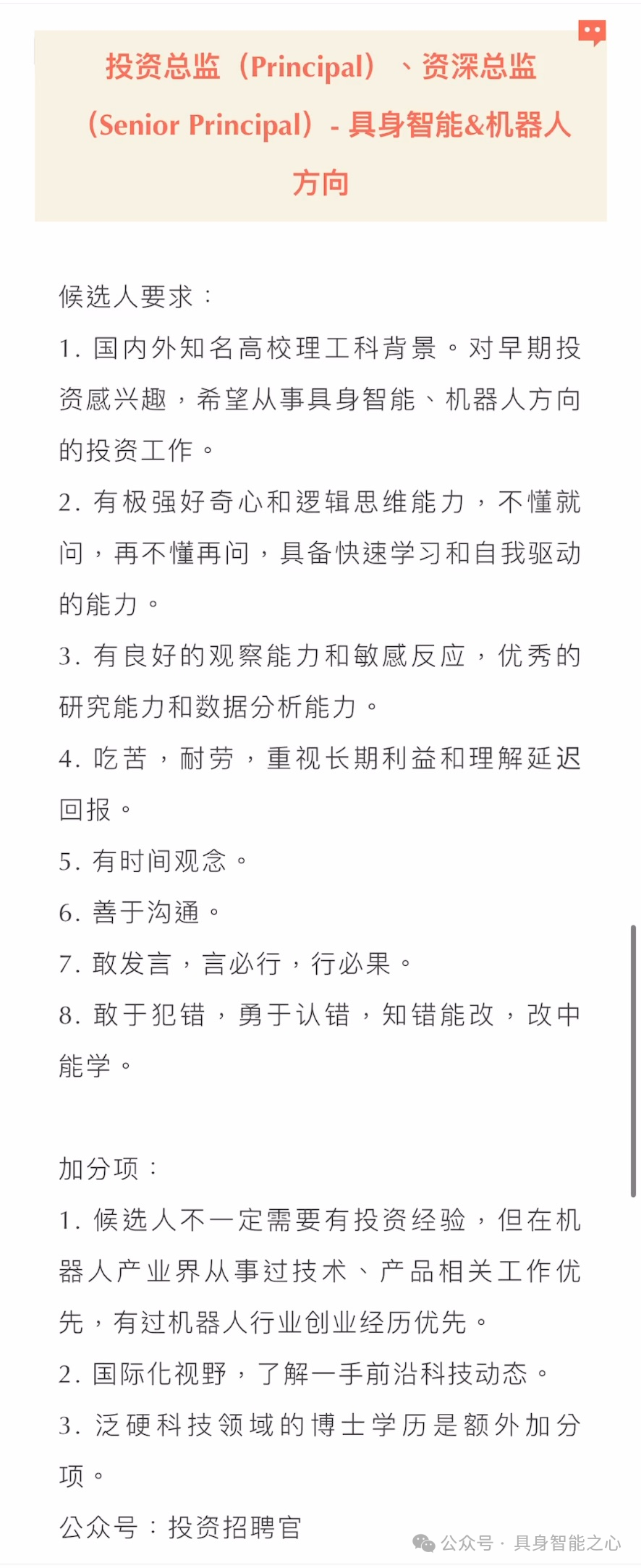
投资管理与行业洞察(投资总监岗位):专注于具身智能和机器人领域的投资工作,要求对行业有深入洞察,具备研究和分析能力,能够评估投资机会和风险,做出合理投资决策,推动投资项目发展,同时需关注行业前沿科技动态,具备国际化视野,以支持早期投资业务。
“具身智能之心”公众号持续推送具身智能领域热点:
往期 · 推荐
(1)具身多模态基础模型
LLM最大能力密度100天翻一倍!清华刘知远团队提出Densing Law
机器人干活总有意外?Code-as-Monitor 轻松在开放世界实时精确检测错误,确保没意外
斯坦福大学最新!具身智能接口:具身决策中语言大模型的基准测试
关于具身智能Vision-Language-Action的一些思考
NVIDIA最新!NVLM:开放级别的多模态大语言模型(视觉语言任务SOTA)
全面梳理视觉语言模型对齐方法:对比学习、自回归、注意力机制、强化学习等
CLIP怎么“魔改”?盘点CLIP系列模型泛化能力提升方面的研究
揭秘CNN与Transformer决策机制:设计原则是关键?
VILA:视觉推理能力如何up up?多模态预训练设计有妙招
(2)3D场景理解、分割与交互
PoliFormer: 使用Transformer扩展On-Policy强化学习,卓越的导航器
大模型继续发力!SAM2Point联合SAM2,首次实现任意3D场景,任意Prompt的分割
更丝滑更逼真!模型自主发现与模式自动识别新升级助力三维场景构建与形状合成
进一步向开放识别迈进!3D场景理解与视觉语言模型的融合创新可以这样玩
(3)具身机器人与环境交互
波士顿动力最新!可泛化的扩散策略:能有效操控不同几何形状、尺寸和物理特性的物体
RSS 2024 | OK-Robot:在机器人领域集成开放知识模型时,真正重要的是什么?
MIT最新!还在用URDF?URDF+:一种针对机器人的具有运动环路的增强型URDF
VisionPAD:3DGS预训练新范式!三大感知任务全部暴力涨点
NeurIPS 2024 | VLMimic:5个人类视频,无需额外学习就能提升泛化性?
港大DexDiffuser揭秘!机器人能拥有像人类一样灵巧的手吗?
TPAMI 2024 | OoD-Control:泛化未见环境中的鲁棒控制(一览无人机上的效果)
纽约大学最新!SeeDo:通过视觉语言模型将人类演示视频转化为机器人行动计划
CMU最新!SplatSim: 基于3DGS的RGB操作策略零样本Sim2Real迁移
伯克利最新!CrossFormer:一个模型同时控制单臂/双臂/轮式/四足等多类机器人
斯坦福大学最新!Helpful DoggyBot:四足机器人和VLM在开放世界中取回任意物体
港大最新!RoboTwin:结合现实与合成数据的双臂机器人基准
Robust Robot Walker:跨越微小陷阱,行动更加稳健!
波士顿动力最新SOTA!ThinkGrasp:通过GPT-4o完成杂乱环境中的抓取工作
基础模型如何更好应用在具身智能中?美的集团最新研究成果揭秘!
(4)具身仿真×自动驾驶
MMLab最新FreeSim:一种用于自动驾驶的相机仿真方法
麻省理工学院!GENSIM: 通过大型语言模型生成机器人仿真任务
EmbodiedCity:清华发布首个真实开放环境具身智能平台与测试集!
华盛顿大学 | Manipulate-Anything:操控一切! 使用VLM实现真实世界机器人自动化
东京大学最新!CoVLA:用于自动驾驶的综合视觉-语言-动作数据集
ECCV 2024 Oral | DVLO:具有双向结构对齐功能的融合网络,助力视觉/激光雷达里程计新突破
(5)权威赛事结果速递
CoRL-LEAP研讨会最佳论文奖,李飞飞团队具身工作ReKep荣获!
模型与场景的交互性再升级!感知、行为预测以及运动规划在Waymo2024挑战赛中有哪些亮点
效率和精度齐飞!CVPR2024 AIS workshop亮点大盘点
(6)具身智能工具深度测评
刚刚,2025 IEEE Fellow名单出炉:戴琼海、姜大昕、尹首一等人入选
巨好用的工具安利!胜过WPS?MinerU 帮你扫清PDF提取
UCLA出品!用于城市空间的具身人工智能模拟平台:MetaUrban
(7)具身智能时事速递
端到端、多模态、LLM如何与具身智能融合?看完这50家公司就明白了
见证历史?高通准备收购英特尔!
万张A100“堆”出来的勇气:一个更极致的中国技术理想主义故事
即将截止!ECCV'24自动驾驶难例场景多模态理解与视频生成挑战赛


















 1761
1761

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









