






作者 | 冰锐 编辑 | 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/686277501
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
框架
mmagic:https://github.com/open-mmlab/mmagic
综述
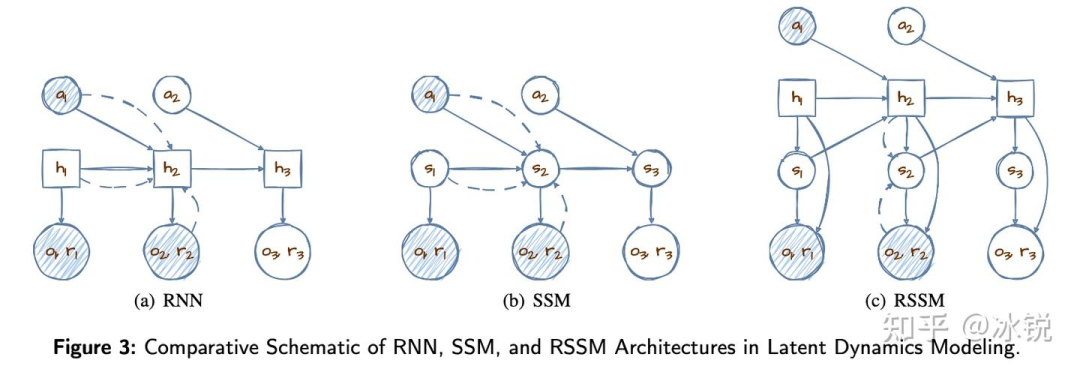
World Models for Autonomous Driving: An Initial Survey
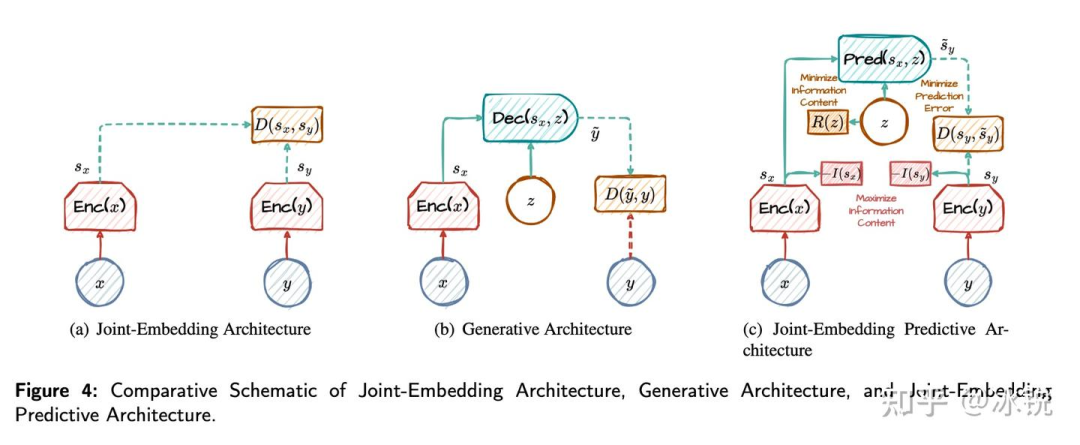
The JEPA model aims to construct mapping relationships between different inputs in the encoding space by minimizing input information and prediction errors.
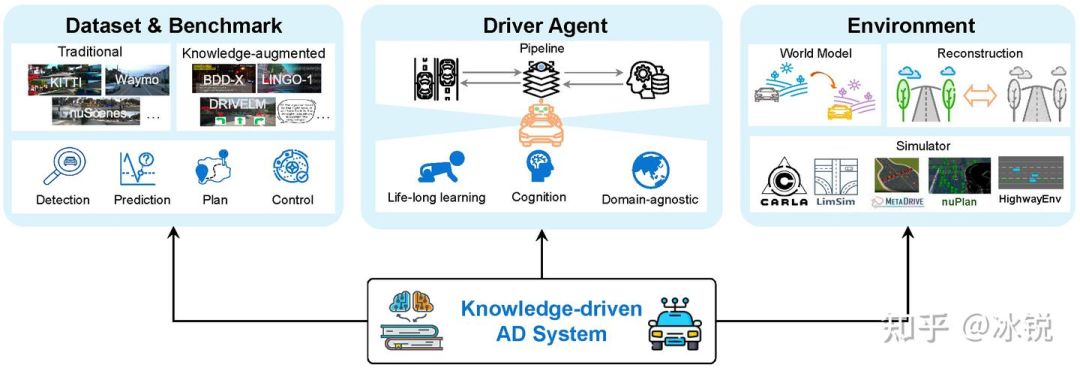
Towards Knowledge-driven Autonomous Driving
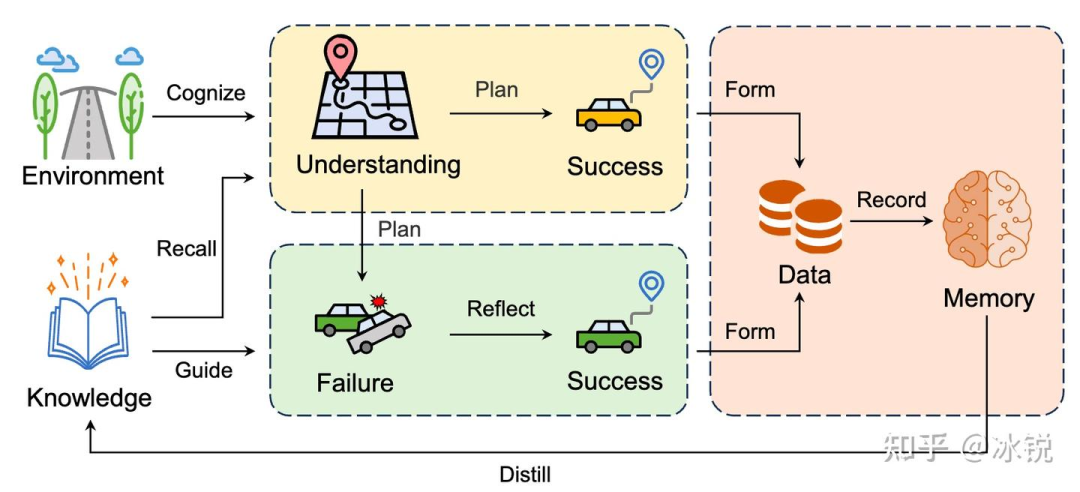
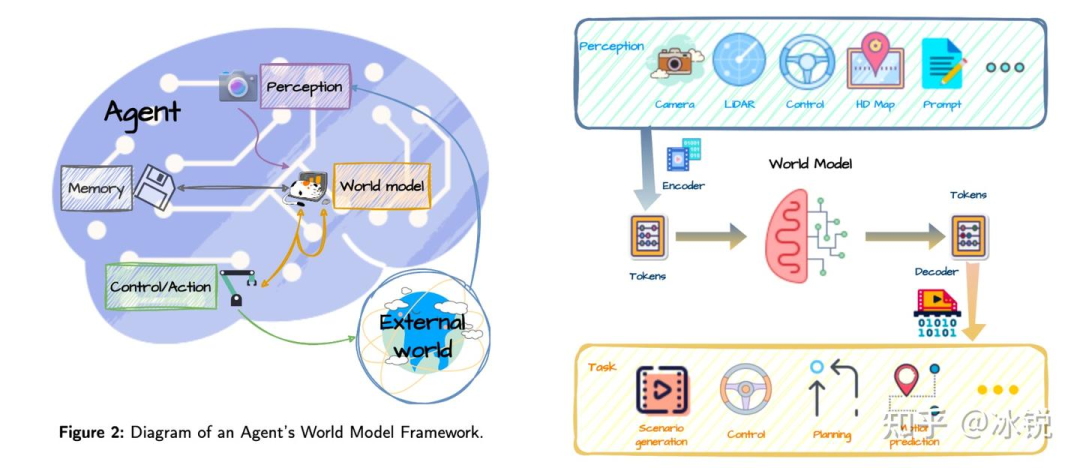
Embodied AI is a facet of intelligence emphasizing the direct interaction between an intelligent system and its environment, involving perception, understanding, and action.
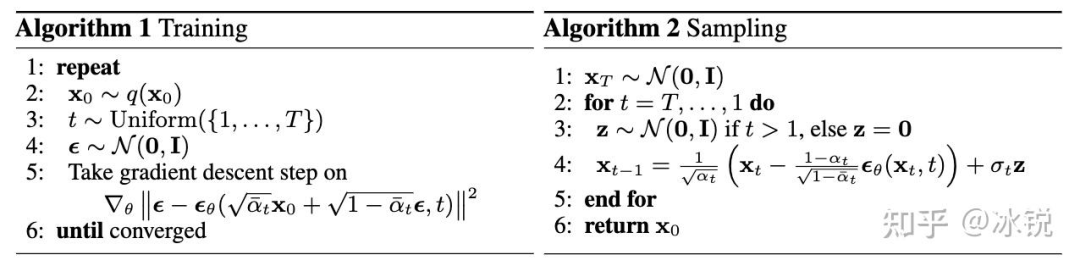
扩散模型
Diffusion model
扩散模型 - Diffusion Model【李宏毅2023】_哔哩哔哩_bilibili
Diffusion扩散模型大白话讲解,看完还不懂?不可能!
多模态预训练CLIP
Diffusion论文:Denoising Diffusion Probabilistic Models
StableDiffusion论文:High-Resolution Image Synthesis with Latent Diffusion Models
Diffusers
stable-diffusion-v1-5权重地址:runwayml/stable-diffusion-v1-5 at main
pytorch手写Diffusion Model:The Annotated Diffusion Model
Stable Diffusion with Diffusers
手写扩散模型-diffuers介绍_哔哩哔哩_bilibili
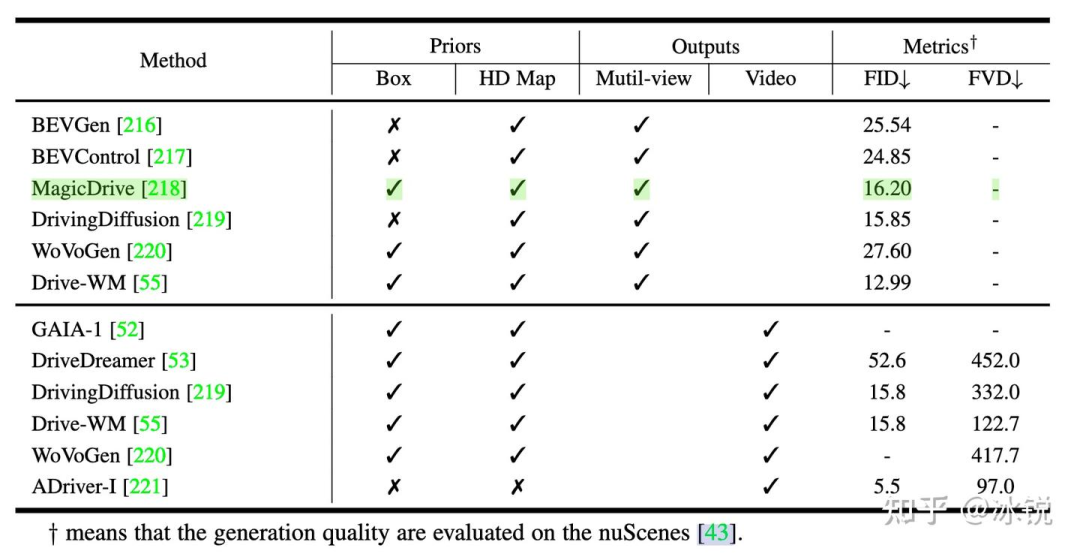
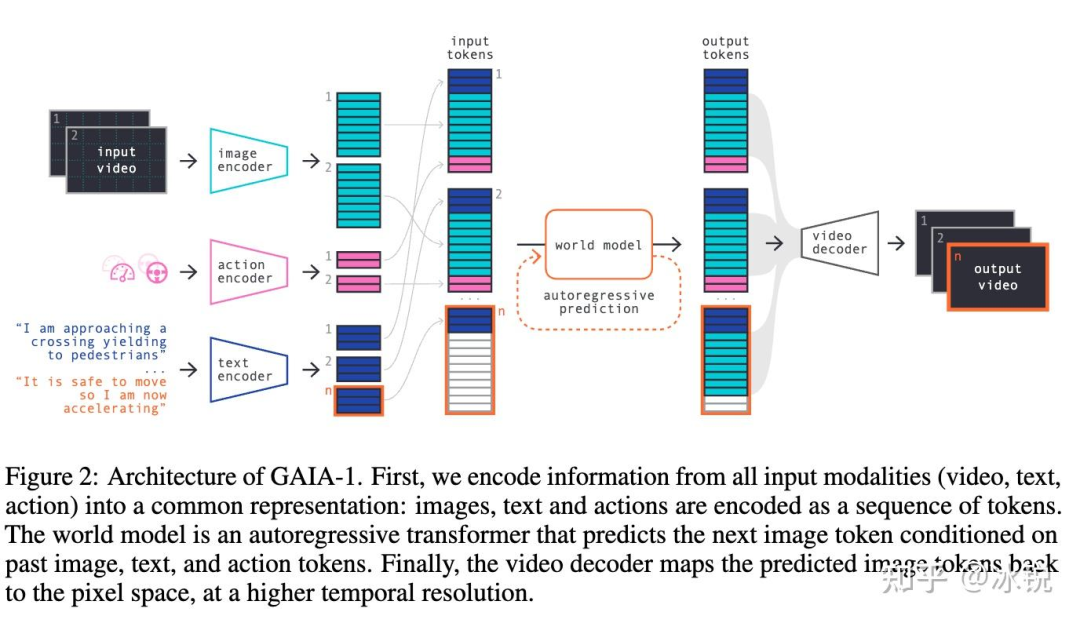
世界模型
GAIA-1(2023.9.29)
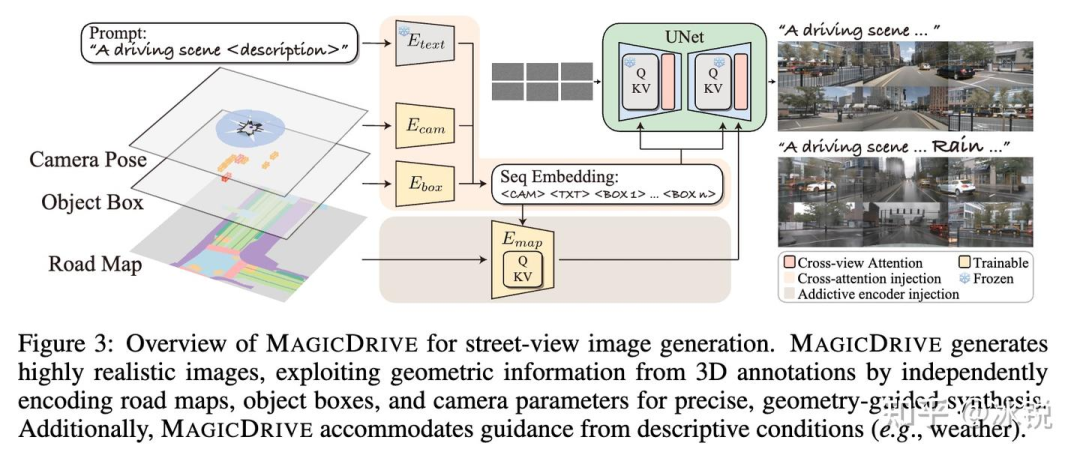
MAGICDRIVE(2024.1.26)
论文地址:MAGICDRIVE: STREET VIEW GENERATION WITHDIVERSE 3D GEOMETRY CONTROL
github:https://github.com/cure-lab/MagicDrive
Drive WM(2023.11.29)
https://github.com/BraveGroup/Drive-WM?tab=readme-ov-file
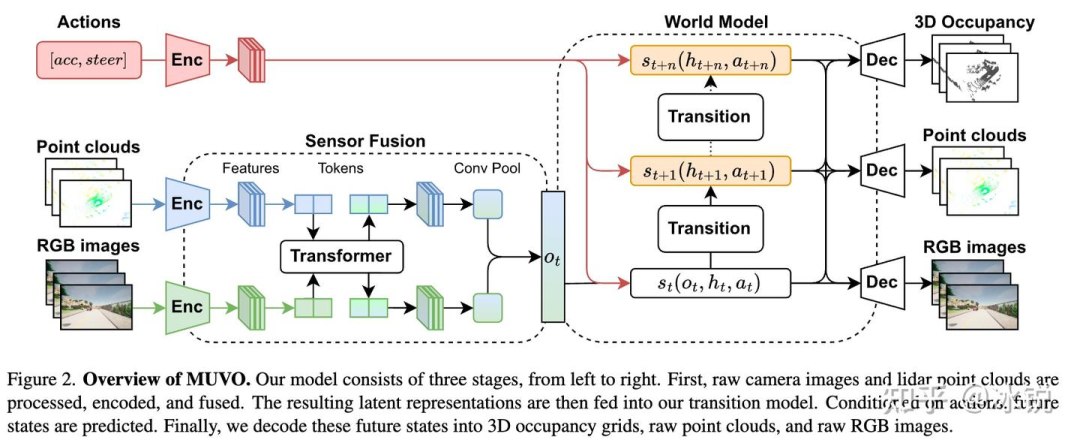
MUVO(2023.11.23)
多模态生成
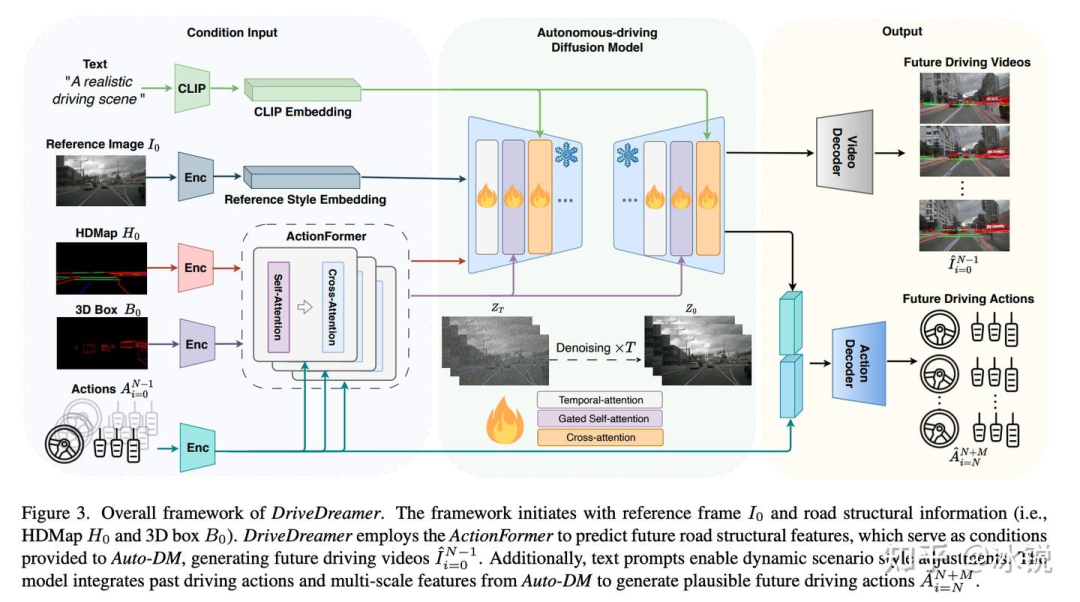
DriveDreamer(2023.11.27)
https://github.com/JeffWang987/DriveDreamer
https://drivedreamer.github.io/
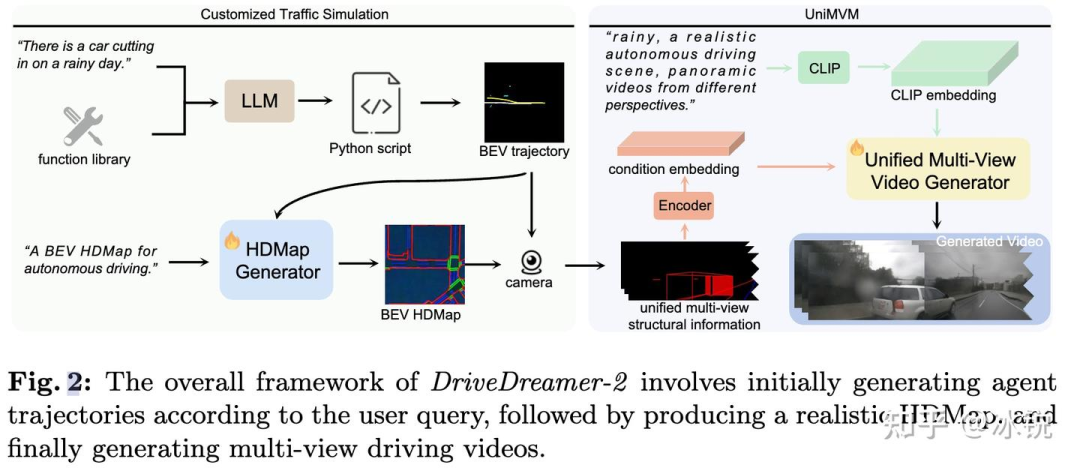
DriveDreamer-2: LLM-Enhanced World Models for Diverse Driving Video Generation(2024.3.11)
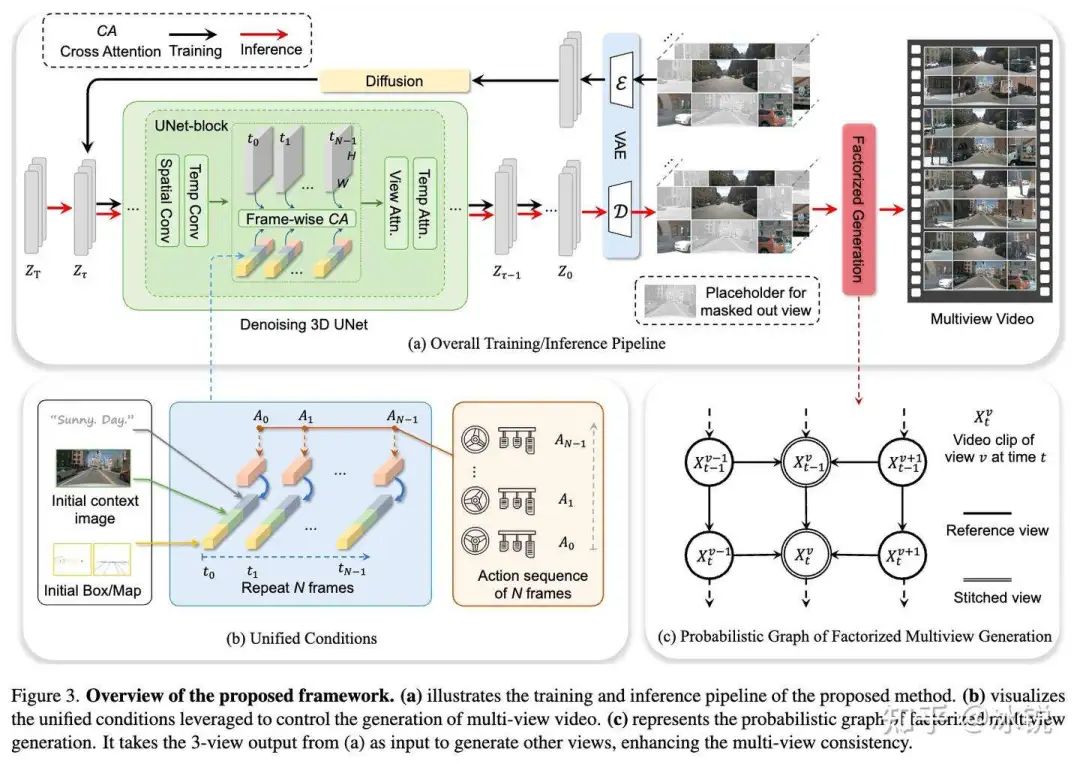
多视角视频生成
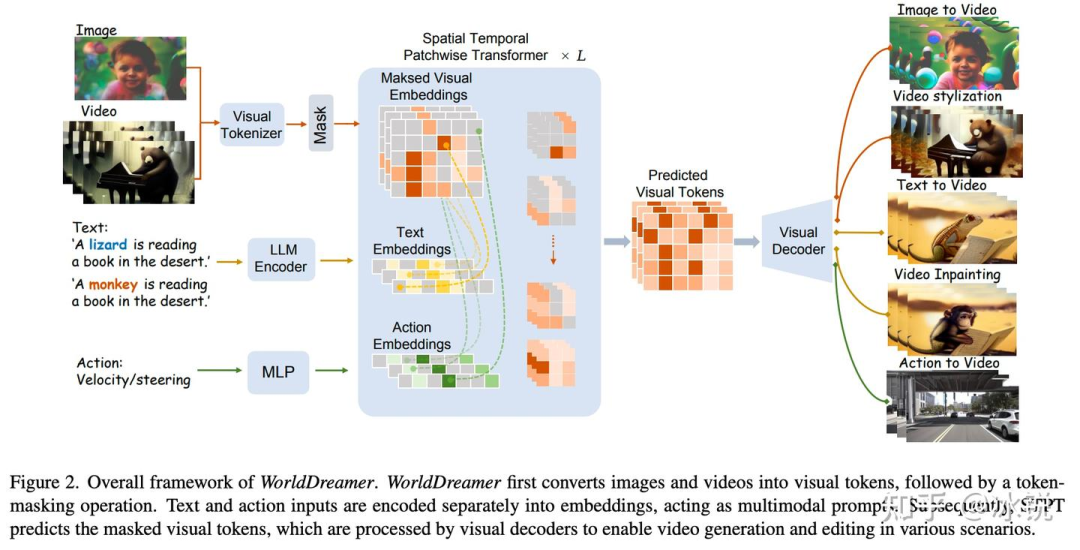
WorldDreamer
https://world-dreamer.github.io/
OccWorld: Learning a 3D Occupancy World Model for Autonomous Driving
Think2Drive: Efficient Reinforcement Learning by Thinking in Latent World Model for Quasi-Realistic Autonomous Driving (in CARLA-v2)
Driving with LLMs
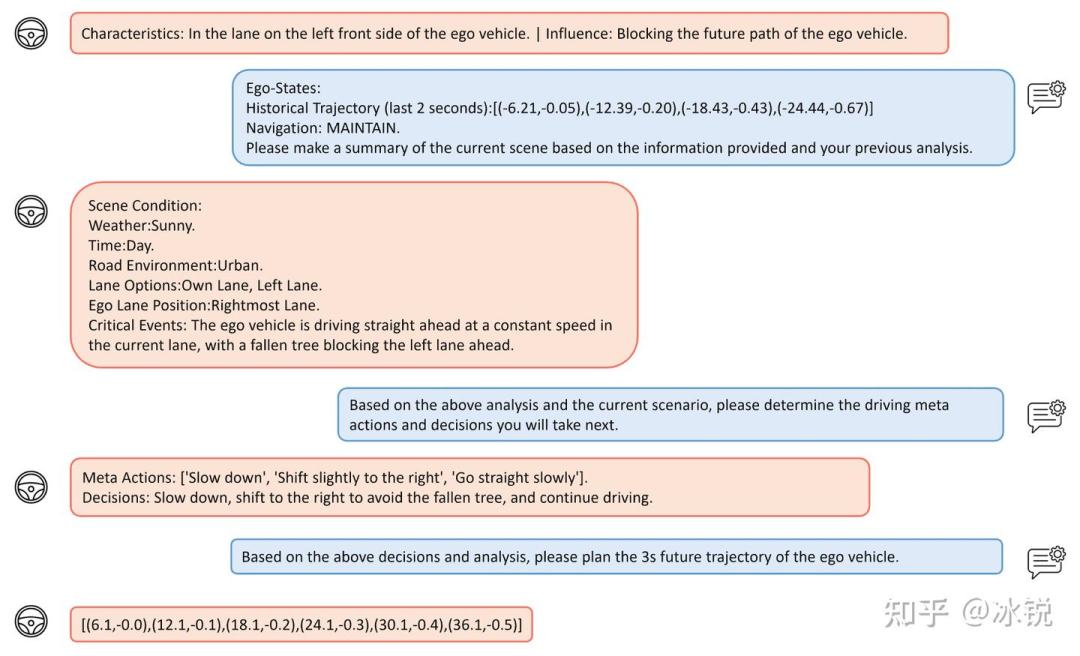
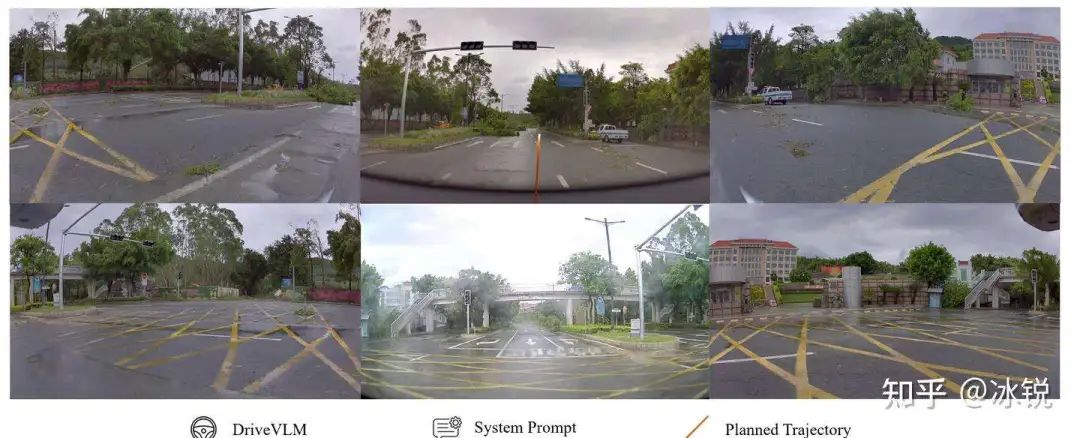
DRIVEVLM: The Convergence of Autonomous Driving and Large Vision-Language Models(2024.2.25)
DriveVLM集成了场景描述、场景分析和分层规划的思维链(CoT)模块
VLM计算量大,提出DriveVLM Dual,将DriveVLM的优势与传统自动驾驶流水线协同混合
据说可以部署在orin芯片上,但猜测只是在orin上跑通,还没有大规模部署到车上
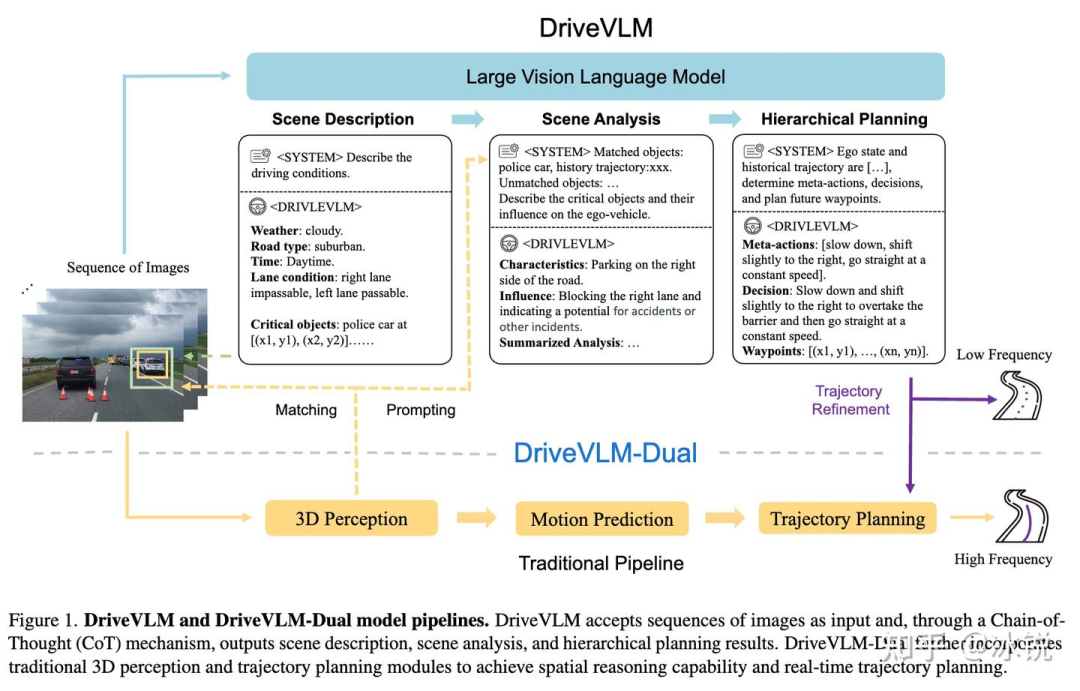
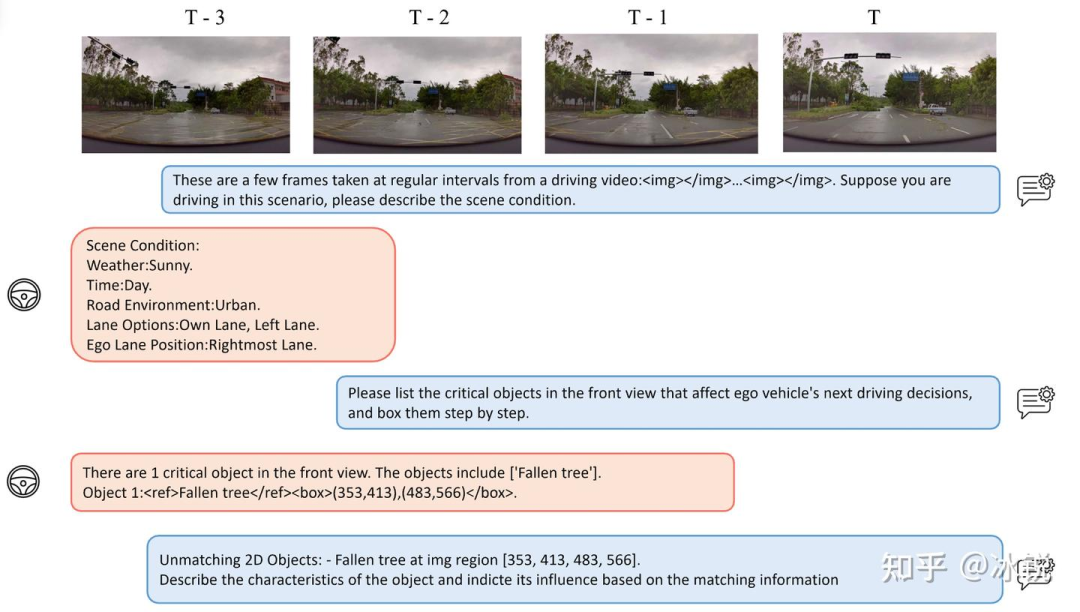
DriveVLM识别了一个倒塌的树木,并给出了稍微向右偏移的驾驶决策
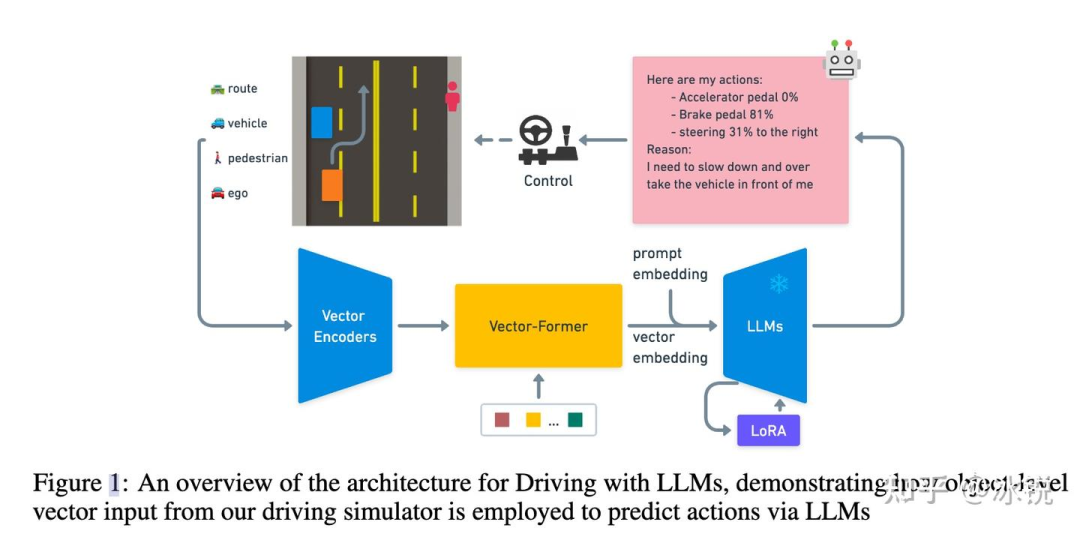
Driving with LLMs: Fusing Object-Level Vector Modality for Explainable Autonomous Driving
论文地址:Driving with LLMs: Fusing Object-Level Vector Modality for Explainable Autonomous Driving
github:https://github.com/wayveai/Driving-with-LLMs
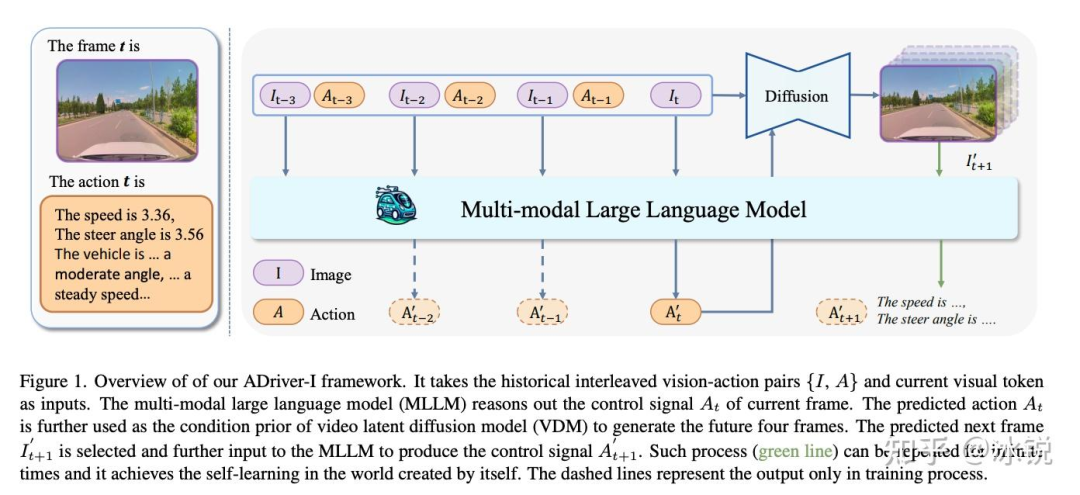
ADriver-I: A General World Model for Autonomous Driving
GAN(图生图)
CYCLEGAN
Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks
mmgeneration:https://github.com/open-mmlab/mmgeneration?tab=readme-ov-file
Lidar GAN
GAN-Based LiDAR Translation between Sunny and Adverse Weather for Autonomous Driving and Driving Simulation
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









