







文章目录
张量并行与 megtron-lm 及 accelerate 配置
https://www.bilibili.com/video/BV1TsWoe4E22
https://arxiv.org/abs/1909.08053
- megtron-lm: 顾名思义针对 transformer 来做的优化
- 是 mp(论文题目),其实更多是tp(Tensor 张量内部做split)
- Transformer(intra layer parallel)
- mlp
- mha
- embedding (input: wte, output: lm_head)
- 单卡做基线,没有通信的开销。存在划分,必然就存在通信。
- 集成进 accelerate
- accelerate 的几个 backends
- deepspeed
- fsdp
- megtron-lm
- https://huggingface.co/docs/accelerate/usage_guides/megatron_lm
- accelerate 的几个 backends
mlp
Y = GeLU ( X ( b ℓ ) , k A k , k ′ ) ∈ R ( b ℓ ) , k ′ Y=\text{GeLU}(X_{(b\ell),k}A_{k,k'})\in \mathbb R^{(b\ell),k'} Y=GeLU(X(bℓ),kAk,k′)∈R(bℓ),k′
对于矩阵 A 的分块方式
- 行分快
- X = [ X 1 , X 2 ] , A = [ A 1 A 2 ] X=\begin{bmatrix}X_1,X_2\end{bmatrix},A=\begin{bmatrix}A_1\\A_2\end{bmatrix} X=[X1,X2],A=[A1A2]
- Y = GeLU ( X A ) = GeLU ( X 1 A 1 + X 2 A 2 ) Y=\text{GeLU}(XA)=\text{GeLU}(X_1A_1+X_2A_2) Y=GeLU(XA)=GeLU(X1A1+X2A2)
- 有两点
- GeLU 的非线性导致 GeLU ( X 1 A 1 + X 2 A 2 ) ≠ GeLU ( X 1 A 1 ) + GeLU ( X 2 A 2 ) \text{GeLU}(X_1A_1+X_2A_2)\neq \text{GeLU}(X_1A_1)+\text{GeLU}(X_2A_2) GeLU(X1A1+X2A2)=GeLU(X1A1)+GeLU(X2A2)
- X i A i ∈ R ( b ℓ ) , k ′ X_iA_i\in\mathbb R^{(b\ell),k'} XiAi∈R(bℓ),k′
- 列分快
- A = [ A 1 , A 2 ] A=\begin{bmatrix}A_1,A_2\end{bmatrix} A=[A1,A2]
-
Y
=
GeLU
(
X
A
)
=
GeLU
(
X
[
A
1
,
A
2
]
)
=
[
GeLU
(
X
A
1
)
,
GeLU
(
X
A
2
)
]
Y=\text{GeLU}(XA)=\text{GeLU}(X\begin{bmatrix}A_1,A_2\end{bmatrix})=[\text{GeLU}(XA_1),\text{GeLU}(XA_2)]
Y=GeLU(XA)=GeLU(X[A1,A2])=[GeLU(XA1),GeLU(XA2)]
- X A i ∈ R b ℓ , k ′ / 2 XA_i\in \mathbb R^{b\ell,k'/2} XAi∈Rbℓ,k′/2
- 如果不同的 splits 放在不同的卡上,不同的卡需要维护全部的数据 X X X(数据未进行分块)
Z = GeLU ( X A ) B Z=\text{GeLU}(XA)B Z=GeLU(XA)B
对于矩阵 B 自然进行行分块:
- B = [ B 1 B 2 ] B=\begin{bmatrix}B_1\\B_2\end{bmatrix} B=[B1B2]
Z = GeLU ( X A ) B = [ GeLU ( X A 1 ) , GeLU ( X A 2 ) ] [ B 1 B 2 ] = GeLU ( X A 1 ) B 1 + GeLU ( X A 2 ) B 2 \begin{split} Z=&\text{GeLU}(XA)B\\ =&\left[\text{GeLU}(XA_1),\text{GeLU}(XA_2)\right]\begin{bmatrix}B_1\\B_2\end{bmatrix}\\ =&\text{GeLU}(XA_1)B_1 + \text{GeLU}(XA_2)B_2 \end{split} Z===GeLU(XA)B[GeLU(XA1),GeLU(XA2)][B1B2]GeLU(XA1)B1+GeLU(XA2)B2
- 最后对两张卡计算结果的加和是一种 all-reduce 的过程
关于all reduce可参考https://zhuanlan.zhihu.com/p/469942194,本质上是一个优化节点数据通信的算法,实现是比较容易的,阿里巴巴的ACCL
mha
- 多头自注意力按照 num heads (
h
h
h) 对 Q,K,V 三个 projection matrix 按列拆分 (
(
k
,
k
)
→
(
k
,
k
/
h
)
(k,k)\rightarrow (k,k/h)
(k,k)→(k,k/h) )
- 对于 O O O:按行拆分
- 每个头的输出为 Y i = softmax ( ( X Q i ) ( X K i ) T d k ) V i ∈ R ℓ , k / h Y_i=\text{softmax}\left(\frac{(XQ_i)(XK_i)^T}{\sqrt{d_k}}\right)V_i\in \mathbb R^{\ell,k/h} Yi=softmax(dk(XQi)(XKi)T)Vi∈Rℓ,k/h
[ Y 1 , Y 2 ] [ B 1 B 2 ] = Y 1 B 1 + Y 2 B 2 [Y_1,Y_2]\begin{bmatrix}B_1\\B_2\end{bmatrix}=Y_1B_1+Y_2B_2 [Y1,Y2][B1B2]=Y1B1+Y2B2
emb
- 如果词表数量是64000,嵌入式表示维度为5120,类型采用32 位精度浮点数,那么整层参数需要的显存大约为64000 × 5120 × 4 /1024/1024 = 1250MB,反向梯度同样需要1250MB,仅仅存储就需要将近2.5GB。
- wte:
E
H
×
v
=
[
E
1
,
E
2
]
E_{H\times v}=[E_1,E_2]
EH×v=[E1,E2]
- column-wise(v,vocab-size dimension)
- 1-50000: 1-25000, 25001-50000
- all-reduce (weight/tensor sum)
- lm head:
[
Y
1
,
Y
2
]
=
[
X
E
1
,
X
E
2
]
[Y_1,Y_2]=[XE_1,XE_2]
[Y1,Y2]=[XE1,XE2]
- all-gather: (weight/tensor concat)
- 存在通信的问题: ( b × s ) × v (b\times s)\times v (b×s)×v( v v v 万级别的)
- softmax:logits => probs
- X E i ∈ R ( b × s ) v 2 XE_i\in\mathbb R^{(b\times s)\frac v2} XEi∈R(b×s)2v
- rowsum ( exp ( X E 1 ) ) \text{rowsum}(\exp(XE_1)) rowsum(exp(XE1)), 长度为 b s bs bs 的列向量,同理长度为 b s bs bs 的列向量,两个列向量 all-reduce 继续得到长度为 bs 的列向量
- all-gather: (weight/tensor concat)

[0, 1, 25000, 25001]: input,不进行拆分- 索引 E1 => 4*hidden_size,第3-4行为全0;
- 索引 E2 => 4*hidden_size,第1-2行为全0;
- 两个结果通过 all-reduce 加一起;
import torch
import torch.nn.functional as F
torch.manual_seed(42)
A = torch.randn(5, 8) # 5行12列的随机矩阵
"""
tensor([[ 1.9269, 1.4873, 0.9007, -2.1055, 0.6784, -1.2345, -0.0431, -1.6047],
[-0.7521, 1.6487, -0.3925, -1.4036, -0.7279, -0.5594, -0.7688, 0.7624],
[ 1.6423, -0.1596, -0.4974, 0.4396, -0.7581, 1.0783, 0.8008, 1.6806],
[ 0.0349, 0.3211, 1.5736, -0.8455, 1.3123, 0.6872, -1.0892, -0.3553],
[-1.4181, 0.8963, 0.0499, 2.2667, 1.1790, -0.4345, -1.3864, -1.2862]])
"""
A_1, A_2 = A.split(4, dim=1)
A_1
"""
tensor([[ 1.9269, 1.4873, 0.9007, -2.1055],
[-0.7521, 1.6487, -0.3925, -1.4036],
[ 1.6423, -0.1596, -0.4974, 0.4396],
[ 0.0349, 0.3211, 1.5736, -0.8455],
[-1.4181, 0.8963, 0.0499, 2.2667]])
"""
A_2
"""
tensor([[ 0.6784, -1.2345, -0.0431, -1.6047],
[-0.7279, -0.5594, -0.7688, 0.7624],
[-0.7581, 1.0783, 0.8008, 1.6806],
[ 1.3123, 0.6872, -1.0892, -0.3553],
[ 1.1790, -0.4345, -1.3864, -1.2862]])
"""
exp_A_1 = torch.exp(A_1)
exp_A_2 = torch.exp(A_2)
rowsum_exp_A_1 = torch.sum(exp_A_1, dim=1)
rowsum_exp_A_2 = torch.sum(exp_A_2, dim=1)
# all-reduce
rowsum = rowsum_exp_A_1 + rowsum_exp_A_2
rowsum.view(-1, 1)
"""
tensor([[17.2970],
[10.2543],
[19.1843],
[14.4078],
[17.8164]])
"""
exp_A_1 / rowsum.view(-1, 1)
"""
tensor([[0.3971, 0.2558, 0.1423, 0.0070],
[0.0460, 0.5071, 0.0659, 0.0240],
[0.2693, 0.0444, 0.0317, 0.0809],
[0.0719, 0.0957, 0.3348, 0.0298],
[0.0136, 0.1375, 0.0590, 0.5415]])
"""
exp_A_2 / rowsum.view(-1, 1)
"""
tensor([[0.1139, 0.0168, 0.0554, 0.0116],
[0.0471, 0.0557, 0.0452, 0.2090],
[0.0244, 0.1532, 0.1161, 0.2799],
[0.2578, 0.1380, 0.0234, 0.0487],
[0.1825, 0.0363, 0.0140, 0.0155]])
"""
torch.concat([exp_A_1 / rowsum.view(-1, 1), exp_A_2 / rowsum.view(-1, 1)], dim=1)
torch.allclose(softmax, torch.concat([exp_A_1 / rowsum.view(-1, 1), exp_A_2 / rowsum.view(-1, 1)], dim=1)) # True
accelerate megtron-lm config
https://huggingface.co/docs/accelerate/usage_guides/megatron_lm

- Sequence Parallelism (SP): Reduces memory footprint without any additional communication.
- https://arxiv.org/pdf/2205.05198
- (Megatron 3)
- Only applicable when using TP.
- It reduces activation memory required as it prevents the same copies to be on the tensor parallel ranks post all-reduce by replacing then with reduce-scatter and no-op operation would be replaced by all-gather.
- https://zhuanlan.zhihu.com/p/522198082
- LayerNorm和Dropout的计算被平摊到了各个设备上,减少了计算资源的浪费;
- LayerNorm和Dropout所产生的激活值也被平摊到了各个设备上,进一步降低了显存开销。
- https://arxiv.org/pdf/2205.05198
存在划分,必然就存在通信。在 Megatron1, 2 中,Transformer核的TP通信是由正向两个Allreduce以及后向两个Allreduce组成的。Megatron 3由于对sequence维度进行了划分,Allreduce在这里已经不合适了。为了收集在各个设备上的sequence parallel所产生的结果,需要插入Allgather算子;而为了使得TP所产生的结果可以传入sequence parallel层,需要插入reduce-scatter算子。在下图中,
所代表的就是前向Allgather,反向reduce scatter,
则是相反的操作。这么一来,我们可以清楚地看到,Megatron-3中,一共有4个Allgather和4个reduce-scatter算子。乍一看,通信的操作比Megatron-1 2都多得多,但其实不然。因为一般而言,一个Allreduce其实就相当于1个Reduce-scatter和1个Allgather,所以他们的总通信量是一样的。
如何配置?
在./.cache/huggingface/accelerate/default_config.yaml里修改。使用命令workspace accelerate launch启动交互式配置。
[Pytorch 分布式] ring-allreduce 算法(scatter-reduce、allgather)以及 FSDP
video: https://www.bilibili.com/video/BV1biLHzAEzv
code: https://github.com/chunhuizhang/pytorch_distribute_tutorials/blob/main/tutorials/3D-parallel/ring-allreduce.ipynb
之前探讨了DP、PP,这个要探讨SP的问题
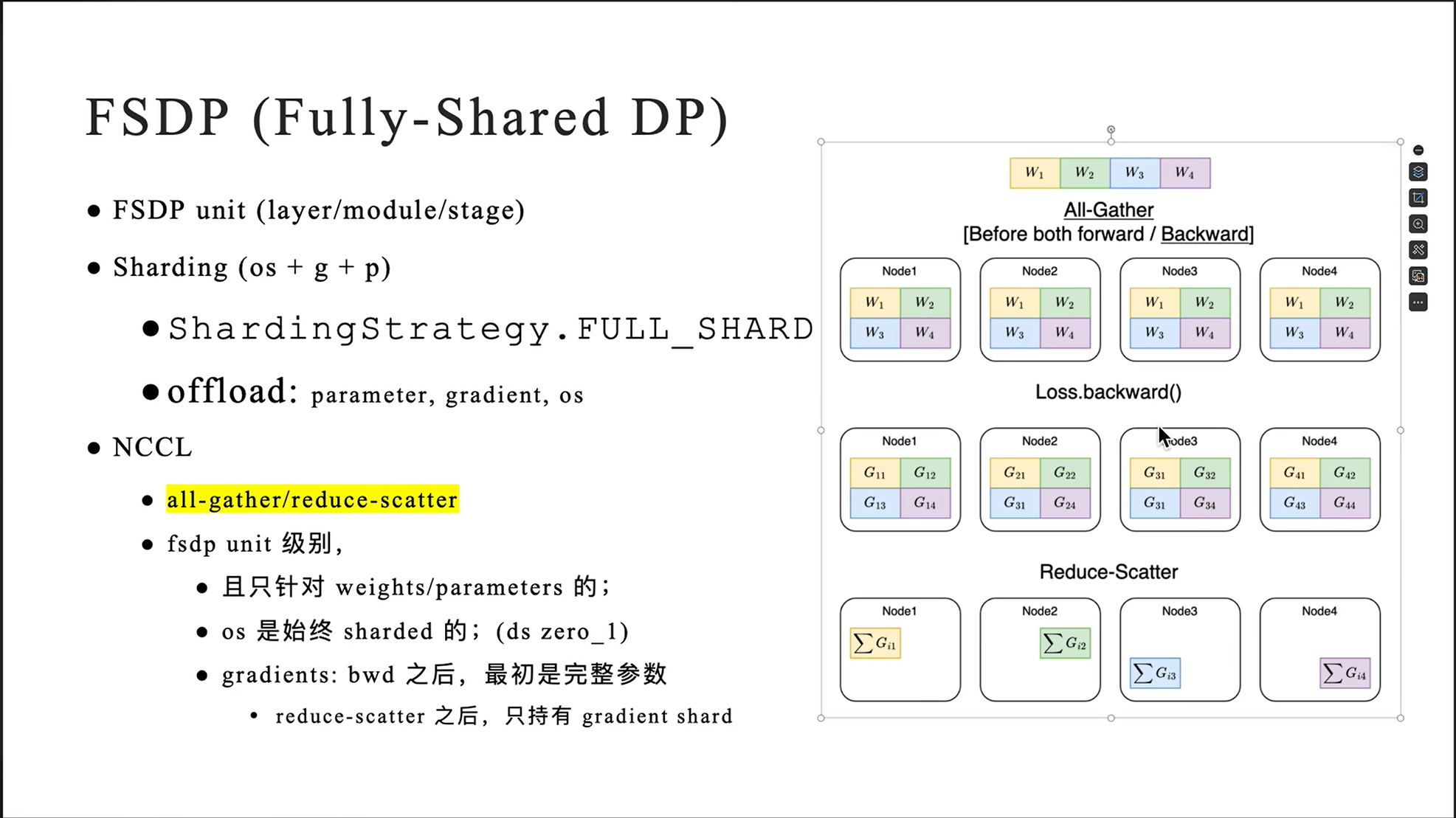
Preliminary:FSDP(Fully Shared DP)
- all-gather/reduce-scatter
from IPython.display import Image
- N 张卡组成一个 ring 环,计算步数,2(N-1)
- scatter-reduce: (N-1),非标准 nccl
- all-gather: (N-1)
- 3张卡,长度为6的向量加和为例;
- input (each gpu model gradients):
[a0, a1 | a2, a3 | a4, a5] = [A0 | A1 | A2][b0, b1 | b2, b3 | b4, b5] = [B0 | B1 | B2][c0, c1 | c2, c3 | c4, c5] = [C0 | C1 | C2]
- output (sync model gradients across gpus):
[a0+b0+c0, a1+b1+c1, a2+b2+c2, a3+b3+c3, a4+b4+c4, a5+b5+c5][A0 + B0 + C0 | A1 + B1 + C1 | A2 + B2 + C2]
- input (each gpu model gradients):
这里要做的一个事情就是,三张卡上有三份不同的数据,现在要把它们加和起来并结算到某一张卡上去。
torch scatter reduce
- https://pytorch.org/docs/stable/generated/torch.Tensor.scatter_reduce_.html
import torch
src = torch.tensor([1., 2., 3., 4., 5., 6.])
index = torch.tensor([0, 1, 0, 1, 2, 1])
input = torch.tensor([1., 2., 3., 4.])
input.scatter_reduce(0, index, src, reduce="sum", include_self=True)
1+(1+3), 2+(2+4+6), 3+(5), 4
# tensor([5, 14, 8, 4])
src = torch.tensor([1., 2., 3., 4., 5., 6.])
index = torch.tensor([0, 1, 0, 1, 2, 1])
input = torch.tensor([1., 2., 3., 4.])
input.scatter_reduce(0, index, src, reduce="mean", include_self=True)
(1+(1+3))/3, (2+(2+4+6))/4, (3+(5))/2, 4
# tensor([1.667, 3.5, 4.0, 4])
上面的例子中,source是src = [1,2,3,4,5,6],然后我们要把这些数据按照index中的索引进行scatter,scatter到input中去,然后做reduce操作(比如求和)
比如0这个位置要进来两个数据(1 和 3),也就是(1+1+3),其他位置是一样的,input里原先的数据也是要算进去的。
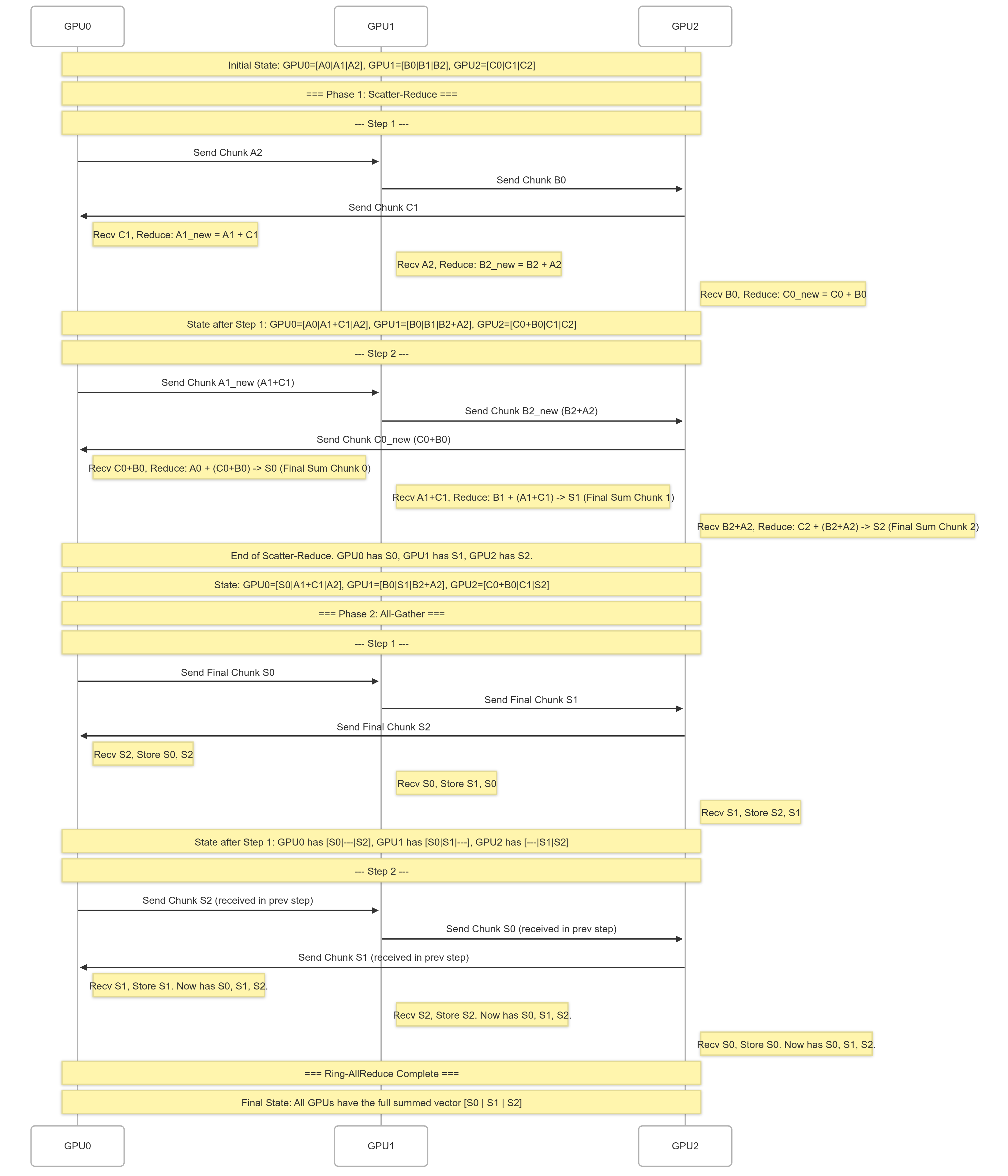
phase1: scatter reduce
减少通信量;先分块,以降低通信量,下面介绍的是
[a0, a1 | a2, a3 | a4, a5] = [A0 | A1 | A2][b0, b1 | b2, b3 | b4, b5] = [B0 | B1 | B2][c0, c1 | c2, c3 | c4, c5] = [C0 | C1 | C2]- scatter:data chunks,reduce:规约(降维)
- nccl 是 reduce-scatter
- 下面两步走是ring-allreduce的一算法
- step1
- GPU0 =>(A2) GPU1 =>(B0) GPU2 =>(C1) GPU0
- GPU0: A1 + C1,
[A0, A1+C1, A2] - GPU1: B2 + A2,
[B0, B1, B2+A2] - GPU2: C0 + B0,
[C0+B0, C1, C2]
- GPU0: A1 + C1,
- GPU0 =>(A2) GPU1 =>(B0) GPU2 =>(C1) GPU0
- step2
- GPU0 =>(A1+C1) GPU1 =>(B2+A2) GPU2 =>(C0+B0) GPU0
- GPU0:
[C0+B0+A0, A1+C1, A2] - GPU1:
[B0, A1+C1+B1, B2+A2] - GPU2:
[C0+B0, C1, B2+A2+C2]
- GPU0:
- GPU0 =>(A1+C1) GPU1 =>(B2+A2) GPU2 =>(C0+B0) GPU0
上面就是第一轮一个环状的传数据,第二轮也是环状传数据三张卡,第一轮只传了一个块,第二轮就两个块,两轮结束,需要计算的所有数据都有了,然后就是reduce/gather到一张卡上。
phase2: all-gather
gather再两步,就三张卡都有需要的数据了。
S0: A0+B0+C0, S1: A1+B1+C1, S2: A2+B2+C2- step1:
- GPU0 =>(S0) GPU1 =>(S1) GPU2 =>(S2) GPU0
- GPU0: [S0, …, S2]
- GPU1: [S0, S1, …]
- GPU2: […, S1, S2]
- GPU0 =>(S0) GPU1 =>(S1) GPU2 =>(S2) GPU0
- step2:
- GPU0 =>(S2) GPU1 =>(S0) GPU2 =>(S1) GPU0
- GPU0: [S0, S1, S2]
- GPU1: [S0, S1, S2]
- GPU2: [S0, S1, S2]
- GPU0 =>(S2) GPU1 =>(S0) GPU2 =>(S1) GPU0
下面是对上面两步走操作的图示例:
why ring-allreduce
- 高效的带宽利用率 (Efficient Bandwidth Utilization):
- 分块传输: Ring-AllReduce 将需要同步的数据(例如梯度)分成多个小块(chunks)。
- 流水线效应: 数据块在环上逐步传输和计算。一个 GPU 可以同时发送一个块给下一个节点,并从上一个节点接收另一个块。这种流水线方式使得 GPU 间的通信链路(如 NVLink 或网络带宽)能够持续被利用,而不是在等待整个大块数据传输完成。
- 点对点通信: 每个 GPU 只需与其在环中的直接邻居通信。这使得算法可以充分利用现代 GPU 系统中高速的点对点连接(如 NVLink),避免了所有 GPU 都向一个中心点发送数据可能造成的拥塞。理论上,在 N 个 GPU 的环中,每个 GPU 在 Scatter-Reduce 和 All-Gather 阶段总共发送和接收的数据量大约是 2 * (N-1)/N * TotalDataSize,接近于最优值 2 * TotalDataSize。
- 均衡的通信负载 (Balanced Communication Load):
- 在 Ring-AllReduce 中,每个 GPU 发送和接收的数据量大致相同,计算负载(Reduce 操作)也相对均衡地分布在各个步骤中。
- 这避免了像基于树(Tree-based)的 All-Reduce 算法中可能出现的根节点通信瓶颈问题,因为在树形结构中,靠近根节点的 GPU 需要处理更多的数据聚合或分发任务。
- 避免中心瓶颈 (Avoids Central Bottleneck):
- 与参数服务器(Parameter Server)架构或其他需要中心协调节点的同步方法不同,Ring-AllReduce 是完全去中心化的。没有单个节点会成为性能瓶颈或单点故障。
- 良好的可扩展性 (Good Scalability):
- 虽然完成一次完整的 Ring-AllReduce 需要 2 * (N-1) 步(N 是 GPU 数量),延迟会随着 N 线性增加,但关键在于每个 GPU 的带宽需求基本保持不变(与 N 无关)。
对于带宽是主要瓶颈的大规模系统(尤其是在传输大量梯度时),这种恒定的带宽需求使得 Ring-AllReduce 比那些带宽需求随节点数增加而增加的算法更具扩展性。
- 虽然完成一次完整的 Ring-AllReduce 需要 2 * (N-1) 步(N 是 GPU 数量),延迟会随着 N 线性增加,但关键在于每个 GPU 的带宽需求基本保持不变(与 N 无关)。
FSDP回顾
https://www.bilibili.com/BV1Kx4y187Te
[Pytorch 分布式] DeepSpeed Ulysses 分布式序列并行算法,尤利西斯,Ring attention
长上下文的计算复杂度是 O ( n 2 ) O(n^2) O(n2)的,这是个很糟糕的复杂度。
- 优化长序列(long sequence,1M context window)的问题;
- DP, TP, PP & SP
- 长序列拆分到不同的设备上计算,每个设备处理 sub seq;
- https://arxiv.org/pdf/2105.13120
- Sequence Parallelism: Long Sequence Training from System Perspective
- https://arxiv.org/pdf/2309.14509
- DeepSpeed Ulysses: System Optimizations for Enabling Training of Extreme Long Sequence Transformer Models
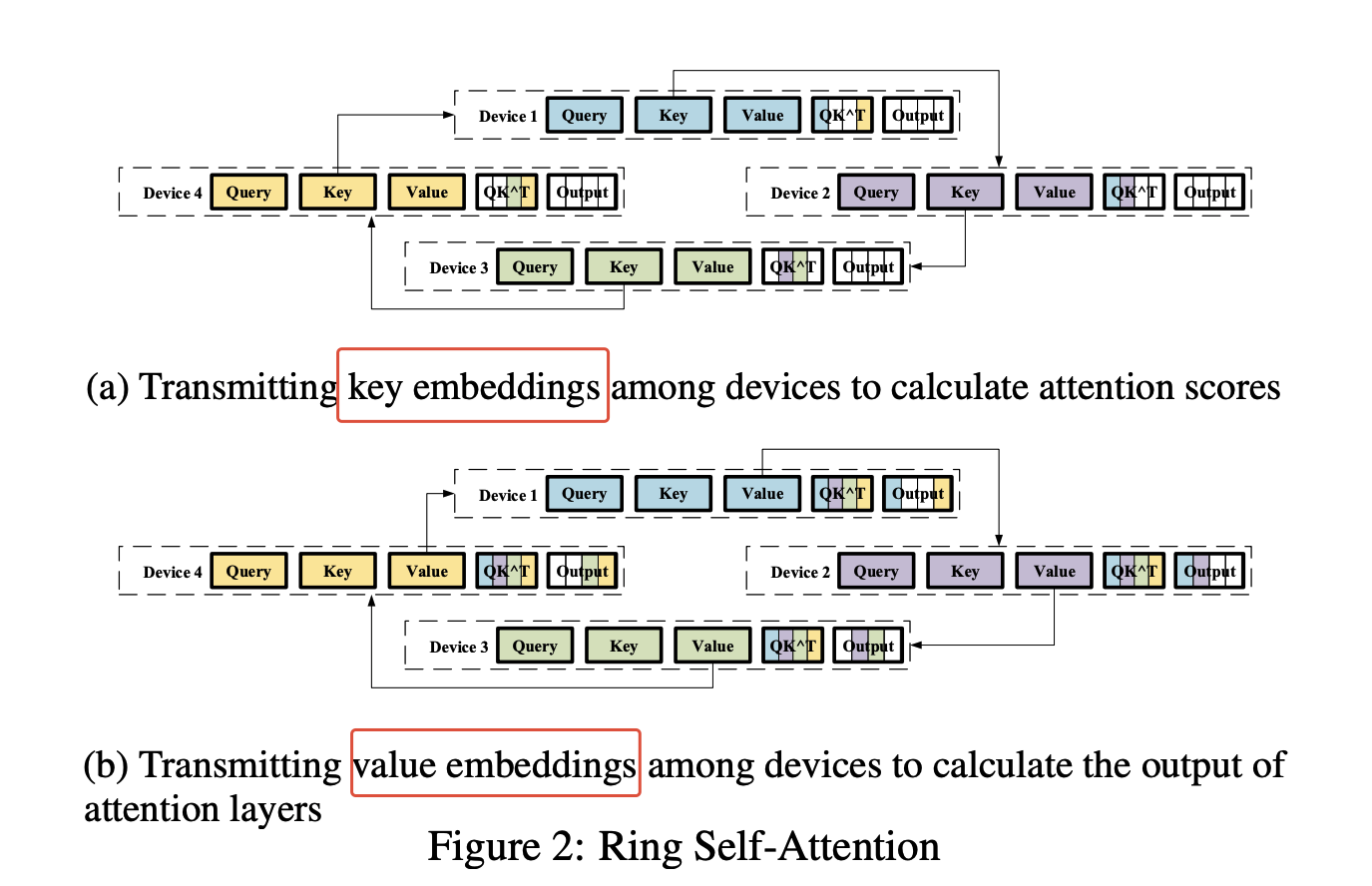
Ring Attention
-
Ring-AllReduce:通信换内存
- 序列 split/shard 到多张卡上,即每张卡只保存一个 sub seq;
- (Ring)QK & (Ring)AV
- 每个 device sub seq 的 Query 需要跟其他 devices 上的所有的 Key 做计算;
Attention ( Q , K , V ) = softmax ( Q K ⊤ d k ) ⏟ A V \text{Attention}(Q, K, V) = \underbrace{ \text{softmax}\left( \frac{QK^{\top}}{\sqrt{d_k}} \right) }_{\mathbf{A}} V Attention(Q,K,V)=A softmax(dkQK⊤)V
- 每个 device sub seq 的 Query 需要跟其他 devices 上的所有的 Key 做计算;
-
N 个 devices,N-1 次 iter,每个 device 都有完整的 QK^T 的结果
Attention ( Q , K , V ) ↑ ( b , n , d v ) = softmax ( Q ↑ ( b , n , d k ) ⋅ K T ↑ ( b , d k , n ) ⏞ Scores Dim: ( b , n , n ) d k ↑ scalar ) ⏟ Weights Dim: ( b , n , n ) ⋅ V ↑ ( b , n , d v ) \underset{\substack{\uparrow \\ (b, n, d_v)}}{\text{Attention}(Q, K, V)} = \underbrace{\text{softmax} \left( \frac{\overbrace{\underset{\substack{\uparrow \\ (b, n, d_k)}}{Q} \cdot \underset{\substack{\uparrow \\ (b, d_k, n)}}{K^T}}^{\text{Scores Dim: }(b, n, n)}}{\underset{\substack{\uparrow \\ \text{scalar}}}{\sqrt{d_k}}} \right)}_{\text{Weights Dim: }(b, n, n)} \cdot \underset{\substack{\uparrow \\ (b, n, d_v)}}{V} ↑(b,n,dv)Attention(Q,K,V)=Weights Dim: (b,n,n) softmax ↑scalardk↑(b,n,dk)Q⋅↑(b,dk,n)KT Scores Dim: (b,n,n) ⋅↑(b,n,dv)V
DeepSpeed UIysses
这张图来自https://arxiv.org/pdf/2309.14509
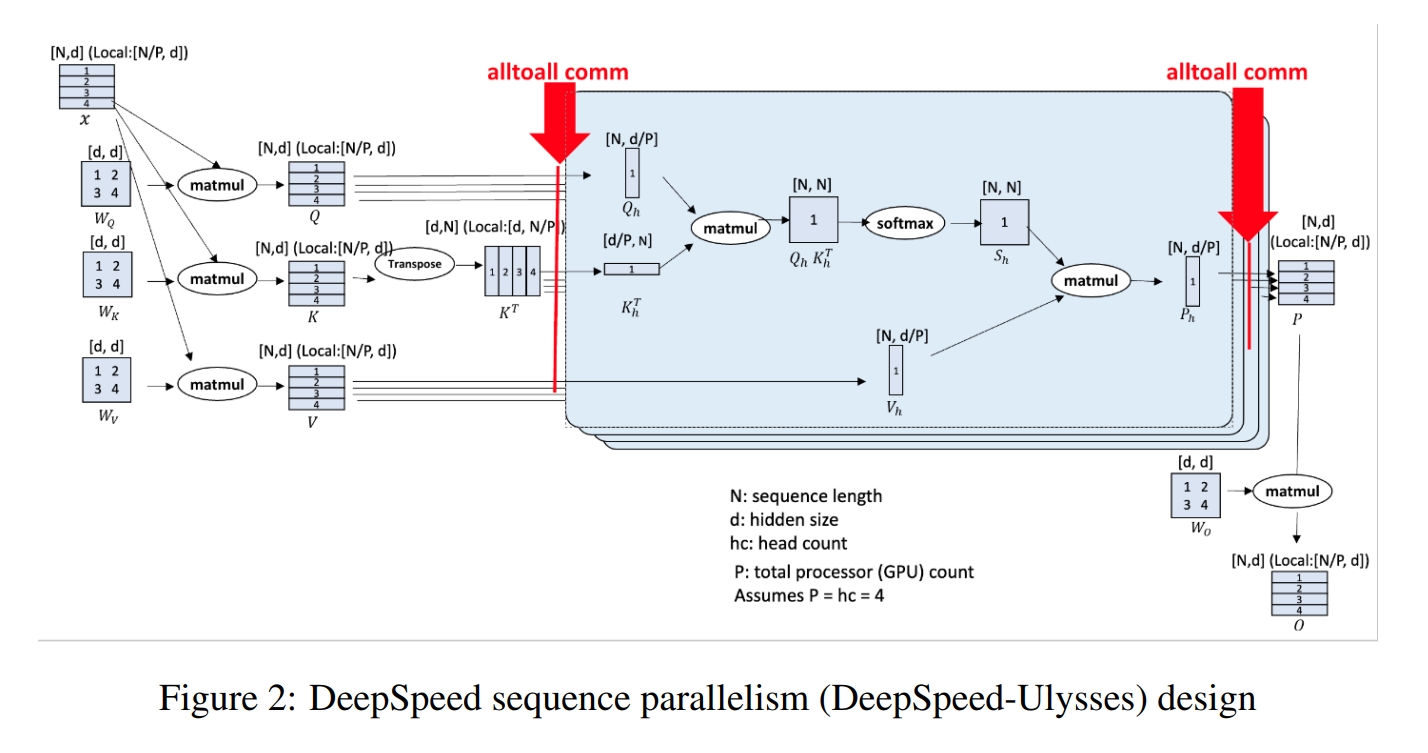
- Ulysses:尤利西斯(a very long novel);
- all-to-all communication collective
- DeepSpeed-Ulysses partitions individual samples along the sequence dimension among participating GPUs.
- Then right before the attention computation, it employs all-to-all communication collective on the partitioned queries, keys and values such that each GPU receives the full sequence but only for a non-overlapping subset of the attention heads. This allows the participating GPUs to compute attention for different attention heads in parallel.
- gather_seq_scatter_heads
- Finally, DeepSpeed-Ulysses employs another all-to-all to gather the results along the attention heads while re-partitioning along the sequence dimension.
- gather_heads_scatter_seq
- 将输入序列 X (长度 N) 沿序列维度切分为 SP 块,每个 GPU 分配到 N/SP 长度的子序列。
- 对于非注意力层 (如 MLP),计算是完全局部的,每个 GPU 处理自己的子序列即可。
- token 之间独立,token-level projection
- Ulysses SP的核心复杂性在于Attention层。为了让每个token在计算注意力时能够考虑到全局序列信息(或者说,让每个head在计算时能看到完整的序列,即使这个head只在当前rank计算),Attention模块前后需要进行两次精密的all-to-all数据重排。MLP层则没有这样的需求,数据在进入MLP时已经是按序列分片好的,可以直接进行本地计算。
- 对于注意力层:
- 步骤 1 (计算 Q, K, V): 每个 GPU 基于其本地子序列计算出本地的 Q_local, K_local, V_local (维度约为 N/SP x d,d 是隐藏维度)。
- 步骤 2 (全局 K, V 收集 - 关键): 使用 All-to-All 通信操作(All-Gather??)。每个 GPU 将自己的 K_local, V_local 发送给所有其他 GPU,并接收来自所有其他 GPU 的 K, V 块。执行后,每个 GPU 拥有完整的全局 K 和 V 矩阵 (维度 N x d),但仍然只拥有本地的 Q_local (维度 N/SP x d)。
- https://docs.nvidia.com/deeplearning/nccl/user-guide/docs/usage/collectives.html
- 步骤 3 (本地注意力计算): 每个 GPU 使用其 Q_local 和完整的全局 K, V 计算其负责的那部分注意力输出 O_local (维度 N/SP x d)。计算公式为 Attention(Q_local, K_global, V_global)。这一步的计算量是 (N/SP) * N * d,内存瓶颈在于存储临时的注意力分数矩阵,大小约为 (N/SP) * N。相比原始的 N*N,内存显著降低。
- 步骤 4 (可选的输出重组): 如果后续层需要按序列拼接的完整输出,可能需要另一次通信(如 All-Gather 或另一次 All-to-All 的变种)来组合 O_local。但在 DeepSpeed 实现中,通常保持分布式状态,直接输入到下一个同样按序列并行的层。
- 对于非注意力层 (如 MLP),计算是完全局部的,每个 GPU 处理自己的子序列即可。
verl sp
verl源码中在./models/transformers/monkey_patch.py中有对fsdp这个的详细实现:
torchrun --nproc_per_node=2 -m pytest tests/model/test_transformers_ulysses.py -svv- dp_size = world_size // sp_size
- monkey_patch
_flash_attention_forward=>_ulysses_flash_attention_forward- 假设序列并行数
ulysses_sp_size = N。每个SP rank最初拥有(batch_size, seq_len / N, num_heads, head_dim)形状的 Q, K, V 张量。- gather_seq_scatter_heads
[bsz, seq/n, h, ...] -> [bsz, seq, h/n, ...](for Q/K/V)- 得到完整的序列,部分的头;
- flash-attn =>
[bsz, seq, h/n, ...] - gather_heads_scatter_seq
[bsz, seq, h/n, ...] -> [bsz, seq/n, h, ...]- 得到部分的序列,完整的头;
- gather_seq_scatter_heads
- 数据并行(fsdp)与 sp
- fsdp:优化的是模型参数所占显存,sp:优化的是激活所占显存
- fsdp: all-gather, reduce-scatter
- sp: all-to-all
SP=4 (列) -->
DP=2 GPU(0,0) GPU(0,1) GPU(0,2) GPU(0,3) <-- DP Group 0 (Row 0)
(行) GPU(1,0) GPU(1,1) GPU(1,2) GPU(1,3) <-- DP Group 1 (Row 1)
|
V
import torch
import torch.nn.functional as F
# --- 参数设定 ---
batch_size = 1
seq_len = 12 # 总序列长度
d_model = 8 # 嵌入维度 (为了清晰起见保持较小)
num_devices = 3 # 模拟的设备/分块数量
chunk_len = seq_len // num_devices # 每个设备上的序列块长度
assert seq_len % num_devices == 0, "序列长度必须能被设备数量整除"
Q = torch.randn(batch_size, seq_len, d_model)
K = torch.randn(batch_size, seq_len, d_model)
V = torch.randn(batch_size, seq_len, d_model)
scale = d_model ** -0.5 # 缩放因子
# 计算注意力分数: Q @ K^T
attn_scores_standard = torch.matmul(Q, K.transpose(-2, -1)) * scale
# 应用 Softmax 获取注意力权重
attn_weights_standard = F.softmax(attn_scores_standard, dim=-1)
# 将权重应用于 V 得到输出
output_standard = torch.matmul(attn_weights_standard, V)
output_standard.shape # torch.Size([1, 12, 8])
ring sa
Q_chunks = list(torch.chunk(Q, num_devices, dim=1))
K_chunks = list(torch.chunk(K, num_devices, dim=1))
V_chunks = list(torch.chunk(V, num_devices, dim=1))
print(f"Q 被切分成 {len(Q_chunks)} 块, 每块形状: {Q_chunks[0].shape}")
print(f"K 被切分成 {len(K_chunks)} 块, 每块形状: {K_chunks[0].shape}")
print(f"V 被切分成 {len(V_chunks)} 块, 每块形状: {V_chunks[0].shape}")
输出:
Q 被切分成 3 块, 每块形状: torch.Size([1, 4, 8])
K 被切分成 3 块, 每块形状: torch.Size([1, 4, 8])
V 被切分成 3 块, 每块形状: torch.Size([1, 4, 8])
# --- 2. Ring Self-Attention Simulation ---
print("\n--- Simulating Ring Self-Attention ---")
# Split tensors into chunks for each "device"
Q_chunks = list(torch.chunk(Q, num_devices, dim=1))
K_chunks = list(torch.chunk(K, num_devices, dim=1))
V_chunks = list(torch.chunk(V, num_devices, dim=1))
print(f"Split Q into {len(Q_chunks)} chunks, each shape: {Q_chunks[0].shape}")
print(f"Split K into {len(K_chunks)} chunks, each shape: {K_chunks[0].shape}")
print(f"Split V into {len(V_chunks)} chunks, each shape: {V_chunks[0].shape}")
output_chunks_rsa = []
# Simulate computation on each device
for i in range(num_devices):
print(f"\n-- Simulating Device {i} --")
q_local = Q_chunks[i] # Query chunk for this device
ordered_scores = [None] * num_devices
# Ring communication for Keys
print(f" Device {i} Q shape: {q_local.shape}")
for j in range(num_devices):
k_idx = (i - j + num_devices) % num_devices # Index of K chunk received in this step
k_remote = K_chunks[k_idx]
print(f" Step {j}: Device {i} using K chunk from Device {k_idx} (Shape: {k_remote.shape})")
# Calculate partial attention scores: Q_local @ K_remote^T
scores_part = torch.matmul(q_local, k_remote.transpose(-2, -1)) * scale
print(f" Partial scores shape for K_{k_idx}: {scores_part.shape}")
ordered_scores[k_idx] = scores_part
# Concatenate partial scores in the correct order (k=0, 1, ..., N-1)
all_scores_for_q_i = torch.cat(ordered_scores, dim=-1)
print(f" Device {i}: Concatenated scores shape (Correct Order): {all_scores_for_q_i.shape}") # Should be [batch, chunk_len, seq_len]
# Apply Softmax
attn_weights_for_q_i = F.softmax(all_scores_for_q_i, dim=-1)
print(f" Device {i}: Softmax weights shape: {attn_weights_for_q_i.shape}")
# Apply weights to Value matrix (using reconstructed full V for equivalence check)
full_V = torch.cat(V_chunks, dim=1) # Reconstruct full V for calculation
output_chunk_i = torch.matmul(attn_weights_for_q_i, full_V)
print(f" Device {i}: Output chunk shape: {output_chunk_i.shape}") # Should be [batch, chunk_len, d_model]
output_chunks_rsa.append(output_chunk_i)
输出:
--- Simulating Ring Self-Attention ---
Split Q into 3 chunks, each shape: torch.Size([1, 4, 8])
Split K into 3 chunks, each shape: torch.Size([1, 4, 8])
Split V into 3 chunks, each shape: torch.Size([1, 4, 8])
-- Simulating Device 0 --
Device 0 Q shape: torch.Size([1, 4, 8])
Step 0: Device 0 using K chunk from Device 0 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_0: torch.Size([1, 4, 4])
Step 1: Device 0 using K chunk from Device 2 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_2: torch.Size([1, 4, 4])
Step 2: Device 0 using K chunk from Device 1 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_1: torch.Size([1, 4, 4])
Device 0: Concatenated scores shape (Correct Order): torch.Size([1, 4, 12])
Device 0: Softmax weights shape: torch.Size([1, 4, 12])
Device 0: Output chunk shape: torch.Size([1, 4, 8])
-- Simulating Device 1 --
Device 1 Q shape: torch.Size([1, 4, 8])
Step 0: Device 1 using K chunk from Device 1 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_1: torch.Size([1, 4, 4])
Step 1: Device 1 using K chunk from Device 0 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_0: torch.Size([1, 4, 4])
Step 2: Device 1 using K chunk from Device 2 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_2: torch.Size([1, 4, 4])
Device 1: Concatenated scores shape (Correct Order): torch.Size([1, 4, 12])
Device 1: Softmax weights shape: torch.Size([1, 4, 12])
Device 1: Output chunk shape: torch.Size([1, 4, 8])
-- Simulating Device 2 --
Device 2 Q shape: torch.Size([1, 4, 8])
Step 0: Device 2 using K chunk from Device 2 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_2: torch.Size([1, 4, 4])
Step 1: Device 2 using K chunk from Device 1 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_1: torch.Size([1, 4, 4])
Step 2: Device 2 using K chunk from Device 0 (Shape: torch.Size([1, 4, 8]))
Partial scores shape for K_0: torch.Size([1, 4, 4])
Device 2: Concatenated scores shape (Correct Order): torch.Size([1, 4, 12])
Device 2: Softmax weights shape: torch.Size([1, 4, 12])
Device 2: Output chunk shape: torch.Size([1, 4, 8])
# Concatenate the output chunks from all devices
output_rsa = torch.cat(output_chunks_rsa, dim=1) # Concatenate along the sequence dimension
print("\n--- RSA Result ---")
print("RSA Concatenated Output Shape:", output_rsa.shape)
# --- 3. Comparison ---
print("\n--- Comparison ---")
# Check if the results are numerically close
are_close = torch.allclose(output_standard, output_rsa, atol=1e-6) # Use a tolerance
print(f"Are Standard Attention and Ring Attention outputs equivalent? {are_close}")
# Verify the shapes match
assert output_standard.shape == output_rsa.shape, "Shapes do not match!"
if are_close:
print("Success: The Ring Self-Attention simulation produced the same result as standard attention.")
else:
print("Failure: The results differ.")
# Optional: Print difference magnitude if they differ
# diff = torch.abs(output_standard - output_rsa).max()
# print(f"Maximum absolute difference: {diff.item()}")
输出:
--- RSA Result ---
RSA Concatenated Output Shape: torch.Size([1, 12, 8])
--- Comparison ---
Are Standard Attention and Ring Attention outputs equivalent? True
Success: The Ring Self-Attention simulation produced the same result as standard attention.

















 1039
1039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









