






一、前言
二值图像,顾名思义就是图像的亮度值只有两个状态:黑(0)和白(255)。二值图像在图像分析与识别中有着举足轻重的地位,因为其模式简单,对像素在空间上的关系有着极强的表现力。在实际应用中,很多图像的分析最终都转换为二值图像的分析,比如:医学图像分析、前景检测、字符识别,形状识别。二值化+数学形态学能解决很多计算机识别工程中目标提取的问题。
二值图像分析最重要的方法就是连通区域标记,它是所有二值图像分析的基础,它通过对二值图像中白色像素(目标)的标记,让每个单独的连通区域形成一个被标识的块,进一步的我们就可以获取这些块的轮廓、外接矩形、质心、不变矩等几何参数。
二、连通域
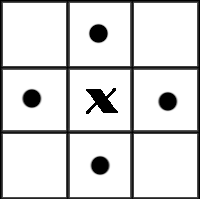
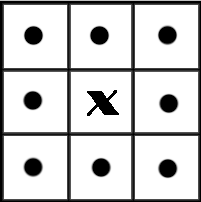
在我们讨论连通区域标记的算法之前,我们先要明确什么是连通区域,怎样的像素邻接关系构成连通。在图像中,最小的单位是像素,每个像素周围有8个邻接像素,常见的邻接关系有2种:4邻接与8邻接。4邻接一共4个点,即上下左右,如下左图所示。8邻接的点一共有8个,包括了对角线位置的点,如下右图所示。
如果像素点A与B邻接,我们称A与B连通,于是我们不加证明的有如下的结论:
如果A与B连通,B与C连通,则A与C连通。
在视觉上看来,彼此连通的点形成了一个区域,而不连通的点形成了不同的区域。这样的一个所有的点彼此连通点构成的集合,我们称为一个连通区域。
下面这符图中,如果考虑4邻接,则有3个连通区域;如果考虑8邻接,则有2个连通区域。(注:图像是被放大的效果,图像正方形实际只有4个像素)。

三、连通区域的标记
连通区域标记算法有很多种,有的算法可以一次遍历图像完成标记,有的则需要2次或更多次遍历图像。这也就造成了不同的算法时间效率的差别,在这里我们介绍2种算法。
第一种算法是现在matlab中连通区域标记函数bwlabel中使的算法,它一次遍历图像,并记下每一行(或列)中连续的团(run)和标记的等价对,然后通过等价对对原来的图像进行重新标记,这个算法是目前我尝试的几个中效率最高的一个,但是算法里用到了稀疏矩阵与Dulmage-Mendelsohn分解算法用来消除等价对,这部分原理比较麻烦,所以本文里将不介绍这个分解算法,取而代这的用图的深度优先遍历来替换等价对。
第二种算法是现在开源库cvBlob中使用的标记算法,它通过定位连通区域的内外轮廓来标记整个图像,这个算法的核心是轮廓的搜索算法,这个我们将在文章中详细介绍。这个算法相比与第一种方法效率上要低一些,但是在连通区域个数在100以内时,两者几乎无差别,当连通区域个数到了103103数量级时,上面的算法会比该算法快10倍以上。















 4233
4233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









