






录制无人车轨迹
1.赋权限:
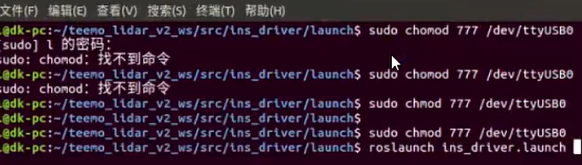
sudo chmod 777 /dev/ttyUSB0
chmod: 无法访问’/dev/ttyUSB0’: 没有那个文件或目录
会报错 ls: 无法访问 ‘/dev/ttyUSB0’。
原因就是:这句命令只有当你的usb端口插上正确的usb转串口的设备后才能运行成功。
/dev/ttyUSB0指的就是USB转串口终端,要接USB转串口类型的设备,比如单片机等。
2.看经纬度是否正确:
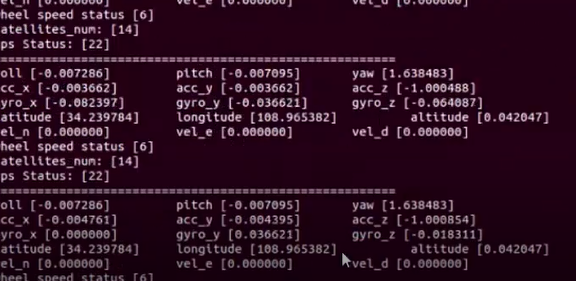
3.把经纬度复制到如上图位置


把经纬度坐标转换为车辆坐标
4.修改惯导参数
修改参数同上(经纬度值)

5.需要在主文件夹下面编译 catkin_make
6.参数修改完成。
7.路径轨迹录制完成后,
要打开 看卡(无)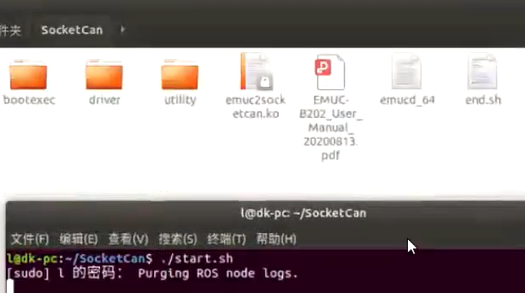
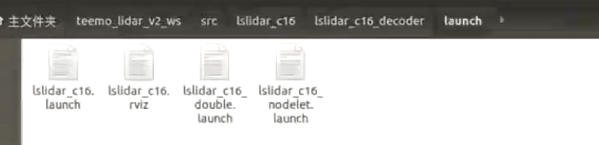
启动激光雷达
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rb8R6Ezi-1668654676236)(C:\Users\dell\AppData\Roaming\Typora\typora-user-images\image-20221115205521431.png)]
没有看卡
车辆底层通信
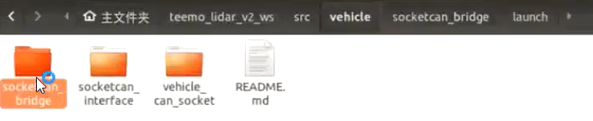
bridge文件是将看卡和ros,打通连接
vehicle-src-receiver和sender接收和发送消息
interface文件用于测试
头文件
可以直接定义一些头文件,直接调用
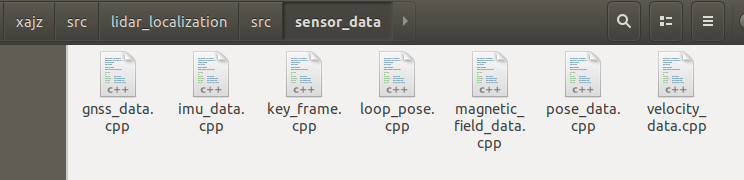
轨迹录制
加载和保存轨迹,可视化轨迹路径
接收惯导信息

修改这里的参数,按距离采样

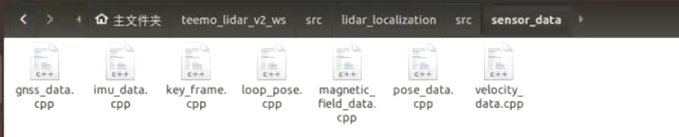
惯导
现在无人车为第一种惯导ins,输入的车速信息不能拔掉。insdriver.cpp中修改惯导信息,

修改ttyUSB0这个串口

修改ins570D惯导类型

修改激光雷达
激光雷达的坐标设置在车辆前轴的某一位置,激光雷达就会时时监测。

当惯导的坐标信息输入后,通过wgs_conversion这个文件进行坐标转换。通过launch文件启动,将经纬高坐标转换为车辆的坐标原点(wgs_convertor.cpp),这个文件一般可以修改。

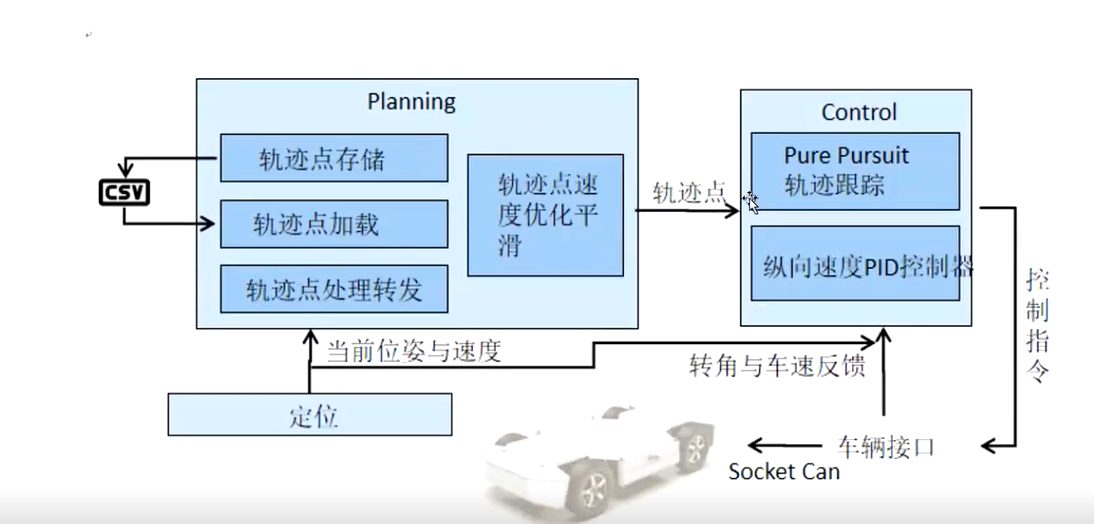
通过wgs_conversion文件坐标转换后,将信息传给三个包,(planning轨迹录制,轨迹规划(局部路径规划),轨迹跟随)。
纯跟踪
FR(前轮)、 BR(后轮) 、4WS(4转轮)来控制车辆转向。

修改参数是在这个
修改第二行:轴距value值

纯跟踪算法流程
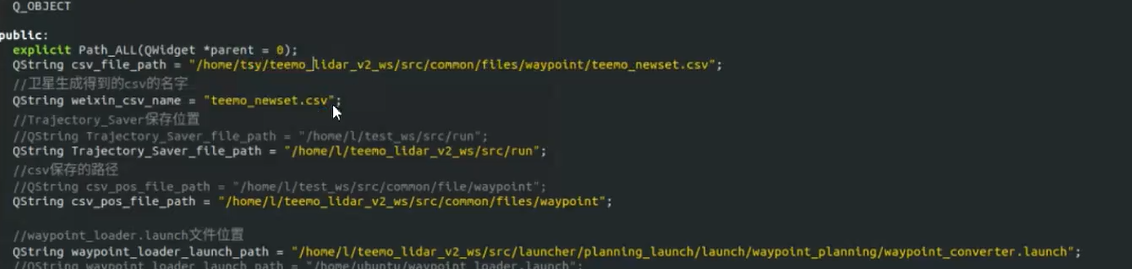
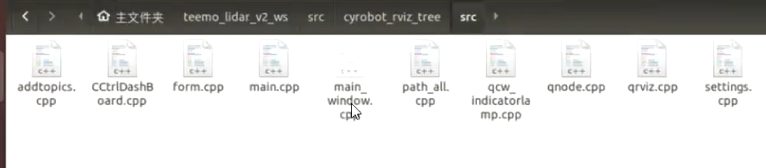
上位机

path_all.h修改用户名,使得路径一致
修改图像


激光雷达
讲解了一下,mapping地图绘制的前后端、回环、可视化参数
编译激光雷达功能包,没成功,是protobuf版本问题,未解决。
存中…(img-5PxUxGVV-1668654676248)]
激光雷达
[外链图片转存中…(img-yNrRLvDD-1668654676249)]
讲解了一下,mapping地图绘制的前后端、回环、可视化参数
编译激光雷达功能包,没成功,是protobuf版本问题,未解决。
















 2015
2015











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









