







 本文详细介绍了如何在Ubuntu系统中通过清华开源镜像配置软件源,然后使用小鱼ROS的一键安装脚本安装ROS,包括后续的环境配置和更新。读者将学习到从设置sources.list文件到运行ROS基本示例的完整流程。
本文详细介绍了如何在Ubuntu系统中通过清华开源镜像配置软件源,然后使用小鱼ROS的一键安装脚本安装ROS,包括后续的环境配置和更新。读者将学习到从设置sources.list文件到运行ROS基本示例的完整流程。
ubuntu系统安装ROS(超级简单)
原文:ROS安装简单版
网址:
一、配置软件源
进去这里
ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站
选择对应的版本

设置好后,随即文本框中会生成你需要的 sources.list 文件内容
然后打开 Ubuntu 的终端,依次输入下面的命令
1、
sudo apt update
2、
cp /etc/apt/sources.list ~/Desktop
3、
sudo gedit /etc/apt/sources.list
三条命令都输完后会打开一个文件内容,
把里面的全删掉,然后复制网页生成的文本框内容粘贴上去,保存文件,退出
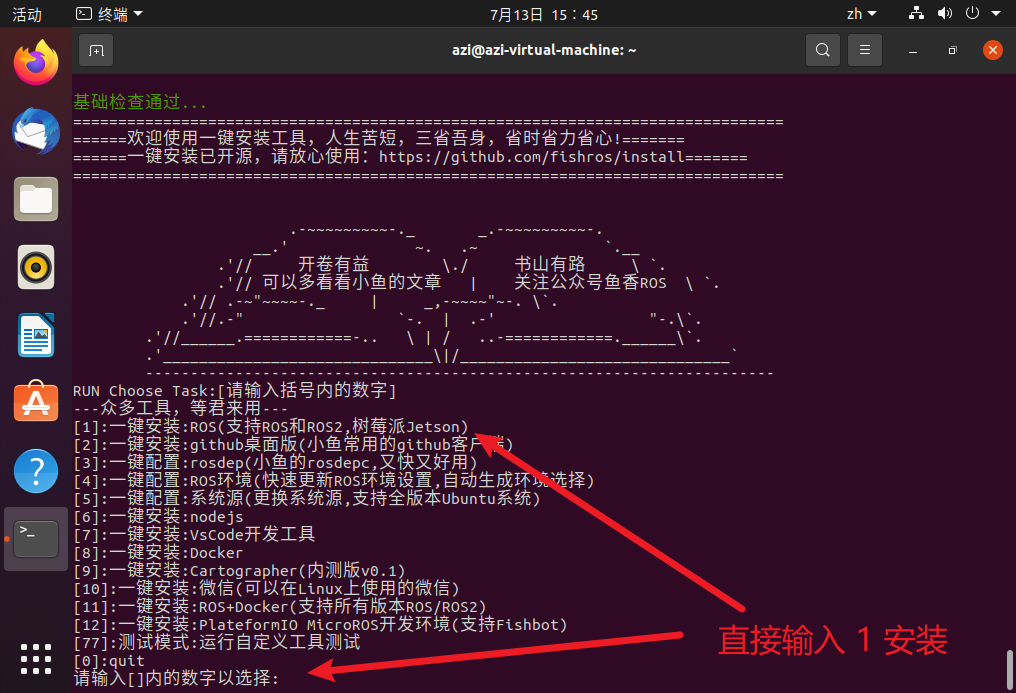
二、安装ROS
这里我们用小鱼的大佬的鱼香ROS 一键安装
打开ubuntu终端,输入:
wget http://fishros.com/install -O fishros && . fishros
然后我们输入 1 一键安装 - 不更换源安装 - 选择你ubuntu版本对应的ros版本 - 进行安装
然后新建一个终端,打开输入
roscore
终端完成后 会显示 [/rosout], 这样成功了一半
再新建第二个终端,输入
rosrun turtlesim turtlesim_node
它会打开一个蓝色屏幕的小乌龟在中间,成功了
再建第三个终端,输入:
rosrun turtlesim turtle_teleop_key
鼠标要在第三个终端,就可以通过按下键盘的 ↑ ↓ ← →键来对小海龟进行控制了。
安装完成
三、配置rosdepc
这里我们用小鱼的大佬的 一键配置
打开ubuntu终端,输入:
wget http://fishros.com/install -O fishros && . fishros
再输入 3 就一键配置了
完成
四、更新系统环境
这里我们还是用小鱼的大佬的 一键配置
打开ubuntu终端,输入:
wget http://fishros.com/install -O fishros && . fishros
再输入 4 就一键配置了
完成
到这里,我们的ROS已经安装完成,加油!
五、后续肯定还要安装其他环境工具
后面需要时,再回来用小鱼的安装命令行安装!
ROS教程:
ROS入门基础教程-快速版
后言:千磨万击还坚劲,任尔东西南北风!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









