







 这篇博客提供了一篇详尽的YDlidar雷达在Ubuntu上使用ROS1和ROS2的快速上手教程。作者指出了官方教程的复杂性和资料不全的问题,并提供了简化步骤。首先,介绍了根据ROS版本选择相应的YDLIDAR驱动包和SDK。接着,详述了SDK的编译与安装过程,包括必要的Ubuntu依赖项安装。然后,讲解了如何编译ROS功能包,针对ROS1使用`catkin_make`,ROS2使用`colcon build`。最后,提到了在验证使用过程中遇到的雷达型号不匹配和报错问题及其解决方案。
这篇博客提供了一篇详尽的YDlidar雷达在Ubuntu上使用ROS1和ROS2的快速上手教程。作者指出了官方教程的复杂性和资料不全的问题,并提供了简化步骤。首先,介绍了根据ROS版本选择相应的YDLIDAR驱动包和SDK。接着,详述了SDK的编译与安装过程,包括必要的Ubuntu依赖项安装。然后,讲解了如何编译ROS功能包,针对ROS1使用`catkin_make`,ROS2使用`colcon build`。最后,提到了在验证使用过程中遇到的雷达型号不匹配和报错问题及其解决方案。
前言
官方教程太复杂了,资料不全,看不清,耗时长,写一篇让小白快速上手的使用的教程
准备工作
确定你要使用的ros版本:
ROS1:YDLIDAR/ydlidar_ros_driver: ydlidar driver package under ros (github.com)
ROS2:YDLIDAR/ydlidar_ros2_driver: ydlidar driver package under ros2 (github.com)
humble:YDLIDAR/ydlidar_ros2_driver at humble (github.com)
SDK(必下):YDLIDAR/YDLidar-SDK: Driver for receiving YD LiDAR data and more... (github.com)
一、SDK编译与安装
0、安装Ubuntu依赖项(可选),小白就无脑直接装,在终端依次输入
sudo apt install cmake pkg-config
sudo apt-get install python swig
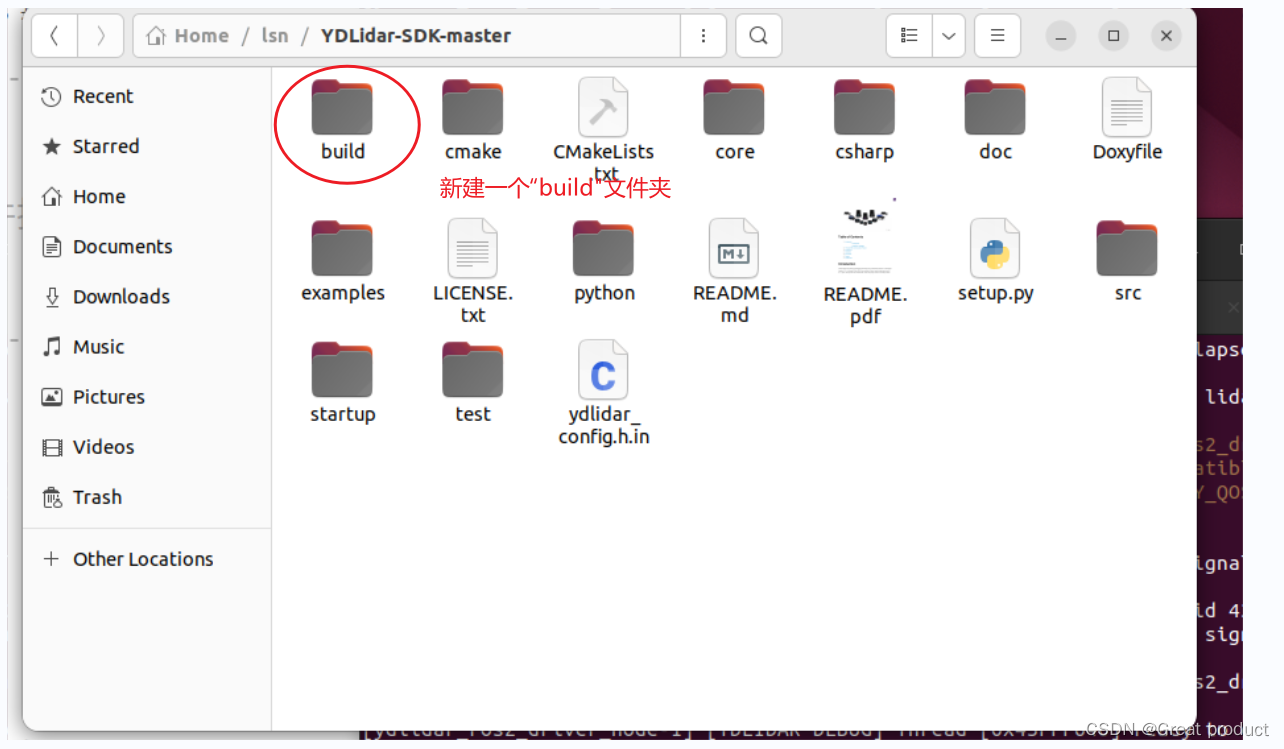
sudo apt-get install python-pip1、解压下载好的SDK文件夹并进去,然后新建一个build文件夹
2、进去空的build文件夹并打终端命令行
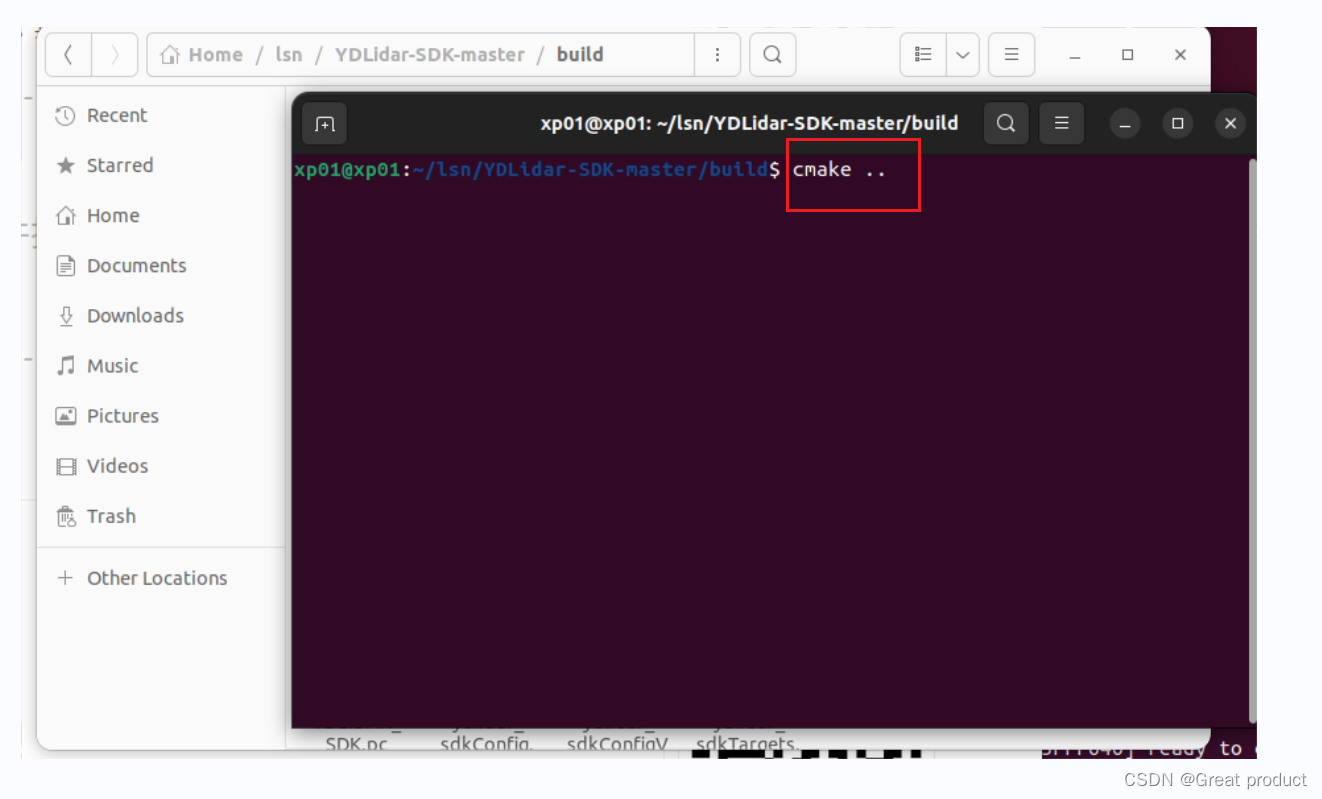
3、依次输入命令行
cmake ..
make
sudo make install二、编译ROS功能包
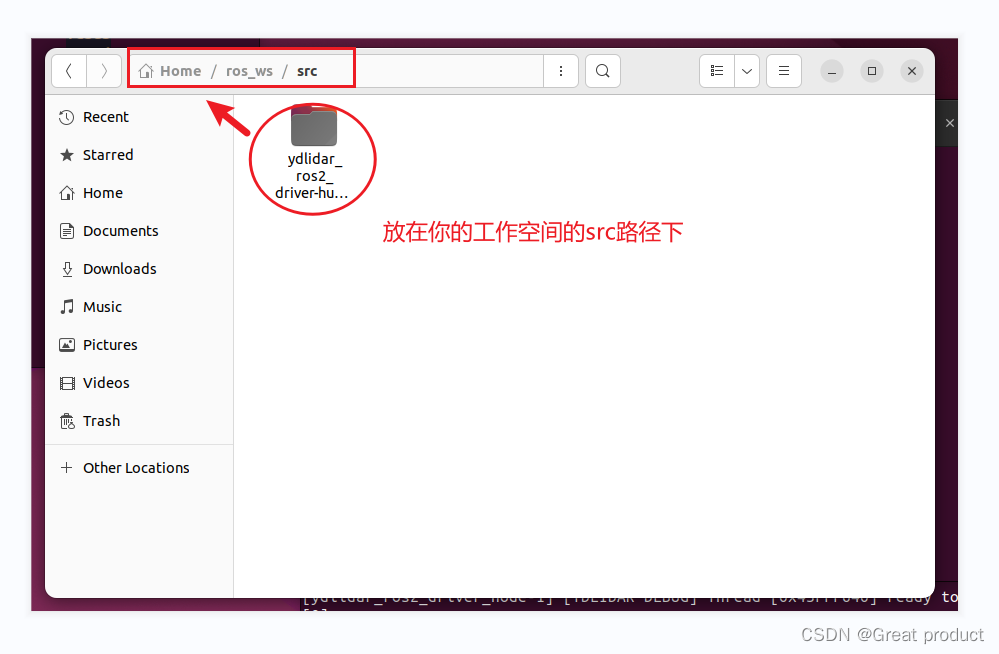
1、解压你的ROS功能包,放在工作空间的src(编程文件)路径下
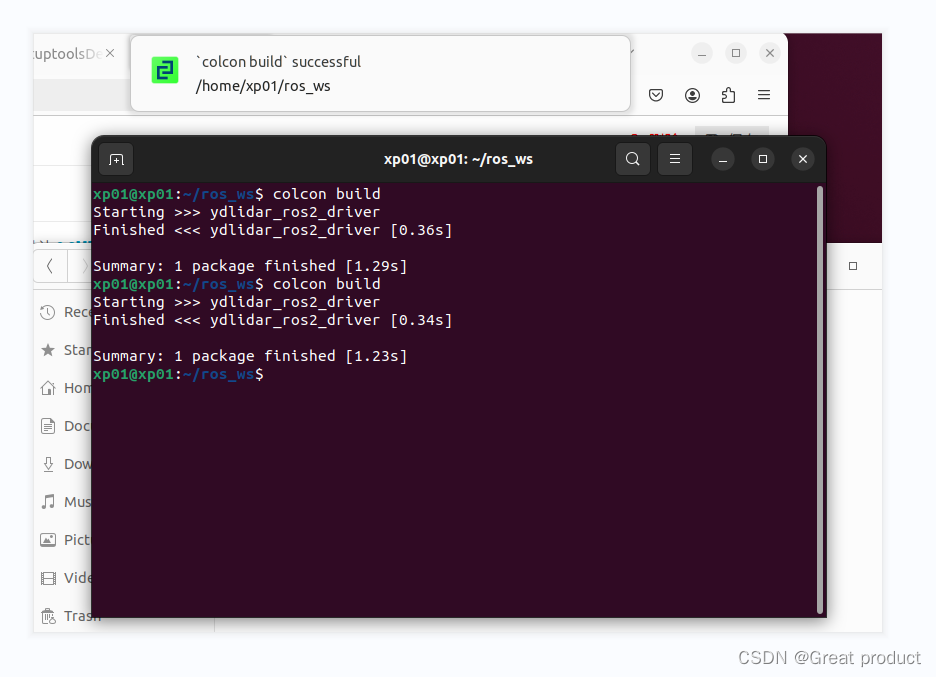
2、编译功能包:ros1编译命令为 catkin_make;ros2编译命令为colcon build
以我的humble版本为例:
3、验证使用
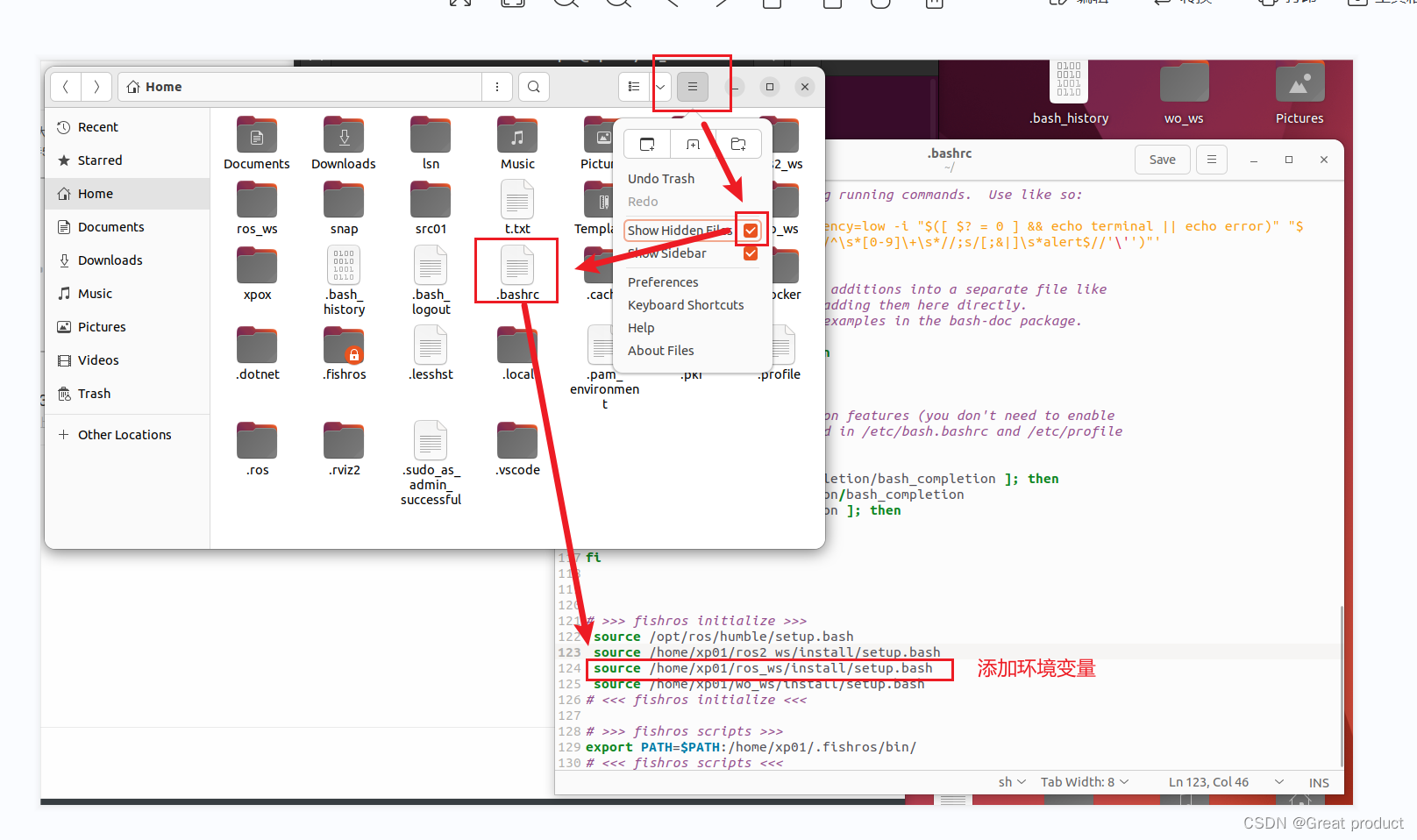
(1)先行添加环境:
(2)电脑插入你的LD雷达并在终端依次输入:
chmod 777 src/ydlidar_ros2_driver/startup/*
sudo sh src/ydlidar_ros2_driver/startup/initenv.sh
sudo chmod 777 /dev/ttyUSB0(3)验证:新开一个终端、输入命令行(每个版本的使用命令不一样):
以bumble为例:
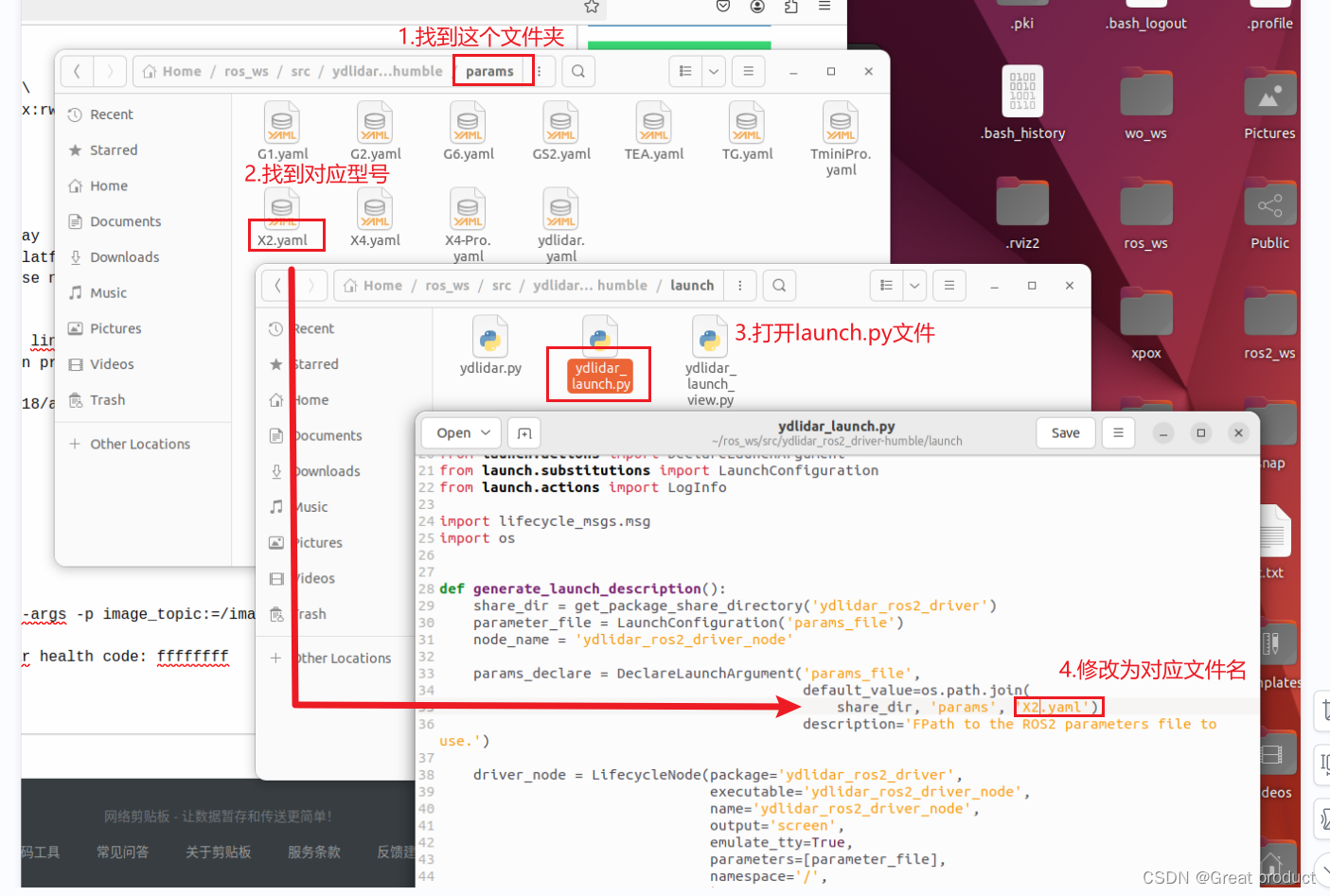
ros2 launch ydlidar_ros2_driver ydlidar_launch.py 问题:
1、使用时,我的雷达型号为X2,他的launch.py文件默认型号不是,他会报错连接不上
解决:
sudo chmod 777 /dev/ttyUSB02、报错:
[YDLIDAR] Error, cannot retrieve YDLidar health code: ffffffff解决:


















 3263
3263

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









