







(源码【已上传到github】:https://github.com/0101110AC/My-project/tree/main)
1. 系统概述
本系统是一个基于生成对抗网络(GAN)的水下图像增强解决方案,旨在提升水下图像的质量,包括去噪、颜色增强和细节恢复。系统由训练和测试两大模块组成,采用模块化设计,具有良好的扩展性和维护性。
1.1模型概述
本文提出了一个针对不同复杂场景量身定制的水下图像增强模型。为了实现这个目标,本文在现有的物理模型的基础上,加入了机器学习和深度学习的框架,以便于提升模型的鲁棒性和适应性。
首先,该模型使用了U-Net类似的编码器-解码器结构,U-Net网络结构是一个对称结构,如图1所示。蓝/白色框表示 feature map;蓝色箭头表示 3x3 卷积,用于特征提取;灰色箭头表示 skip-connection,用于特征融合;红色箭头表示池化 pooling,用于降低维度;绿色箭头表示上采样 upsample,用于恢复维度;青色箭头表示 1x1 卷积,用于输出结果。
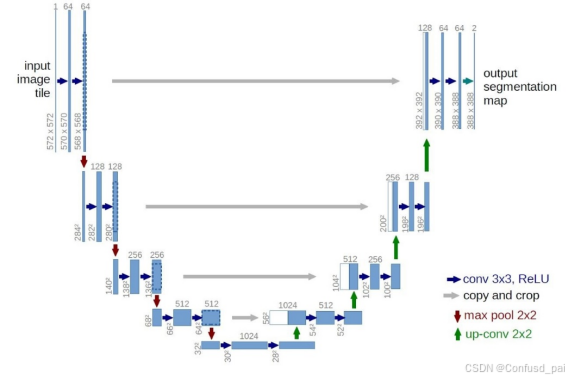
图1. U-Net结构详解图
模型在使用了U-Net类似的编码器-解码器结构的基础上,采用GAN架构进行对抗训练,具体如图2所示。相比于传统的方法, GAN架构可以生成高质量的新数据,处理复杂的数据分布。在特征学习上,GAN可以自动提取特征,学习到更具代表性的特征。GAN适用于多种任务和领域,具有非常强的灵活性。因此,本文选用GAN架构代替传统的方法完成工作。
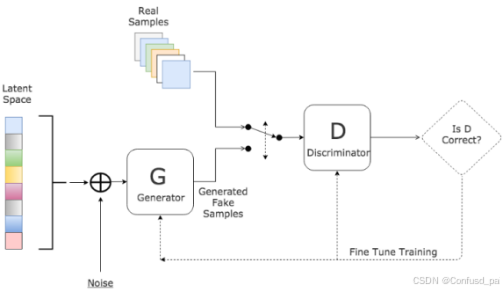
图2. GAN架构
之所以选择U-Net和GAN的组合,是因为这种架构特别适合图像增强任务。这个模型能保留原始图像的细节信息,能够学习复杂的图像转换,可以通过对抗训练提高生成质量,对于像素级损失确保基本内容保持不变。
1.2评估指标概述
本文通过计算PSNR(峰值信噪比)、UCIQE(颜色质量指数)和UIQM(视觉质量指数)来计算图像质量的评估指标。
计算PSNR。本文计算了原始图像和增强图像之间的均方误差(MSE),然后根据均方误差计算了PSNR。PSNR是一种常用的图像质量评估指标,它反映了图像的清晰度和细节保留程度。计算的值越高,说明图像质量越好。
计算UCIQE。本文将图像从RGB颜色空间转换为LAB颜色空间,然后提取亮度通道(L通道)和色度通道(A和B通道)。接着,计算了色度通道的均值、标准差和最大值,以及亮度通道的最大值和最小值。最后根据这些值计算了UCIQE。UCIQE是一种常用的图像质量评估指标,它反映了图像的颜色质量和对比度。计算的值越高,说明图像质量越好。
计算UIQM。本文将图像从RGB颜色空间转换为HSV颜色空间,然后提取色度通道(S通道)和亮度通道(V通道)。接着计算色度通道的均值、拉普拉斯算子的方差和标准差。最后根据这些值计算了UIQM。UIQM是一种常用的图像质量评估指标,它反映了图像的视觉质量。计算的值越高,说明图像质量越好。
这些指标互相补充,共同提供了对水下图像质量的全面评估。
2. 核心架构设计
2.1 生成器(Generator)
生成器采用编码器-解码器架构,结合多种先进的深度学习技术:
2.1.1. 特征提取与编解码
class Generator(nn.Module):
def __init__(self):
# 初始特征提取
self.init_conv = ConvBlock(3, 64)
# 编码器
self.encoder = nn.Sequential(
ConvBlock(64, 128, 4, 2, 1),
ConvBlock(128, 256, 4, 2, 1),
)
# 解码器
self.decoder = nn.Sequential(
nn.ConvTranspose2d(256, 128, 4, 2, 1),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
# ...
)2.1.2. 注意力机制
# 空间注意力
class SpatialAttention(nn.Module):
def forward(self, x):
avg_out = torch.mean(x, dim=1, keepdim=True)
max_out, _ = torch.max(x, dim=1, keepdim=True)
x_cat = torch.cat([avg_out, max_out], dim=1)
attention = self.sigmoid(self.conv(x_cat))
return x * attention
# 通道注意力
class ChannelAttention(nn.Module):
def forward(self, x):
avg_out = self.fc(self.avg_pool(x))
max_out = self.fc(self.max_pool(x))
attention = self.sigmoid(avg_out + max_out)
return x * attention2.1.3. 图像增强处理
def enhance_colors(self, img):
"""HSV空间的颜色增强"""
img_hsv = torch.zeros_like(img)
img_hsv[:, 0] = 0.5 * (torch.sin(3.14159 * img[:, 0]) + 1)
img_hsv[:, 1] = torch.clamp(1.2 * img[:, 1], 0, 1)
img_hsv[:, 2] = torch.clamp(1.1 * img[:, 2], 0, 1)
return img_hsv
def denoise(self, img, kernel_size=3, sigma=1.0):
"""高斯滤波去噪"""
# 实现高斯核和滤波操作2.2 判别器(Discriminator)
判别器采用经典的CNN结构,通过多层卷积实现图像真伪判断:
class Discriminator(nn.Module):
def __init__(self):
self.model = nn.Sequential(
nn.Conv2d(3, 64, 4, stride=2, padding=1),
nn.LeakyReLU(0.2, inplace=True),
# 逐步降采样
# ...
nn.Sigmoid()
)3. 数据处理与训练
3.1 数据集实现
class UnderwaterDataset(Dataset):
def __init__(self, root_dir, transform=None):
self.images_dir = Path(root_dir) / 'images'
self.transform = transform
self.images = list(self.images_dir.glob('*.jpg'))3.2 训练配置
class Config:
def __init__(self):
self.epochs = 200
self.batch_size = 8
self.lr = 0.0002
self.b1 = 0.5
self.b2 = 0.999
self.image_size = 256
self.device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')4. 测试与评估系统
4.1 测试器设计
class Tester:
def __init__(self):
self.device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
self.image_size = 256
self.model_path = self.find_latest_model()4.2 评估指标实现
4.2.1. PSNR(峰值信噪比)
def calculate_psnr(self, original, enhanced):
return psnr(original, enhanced)4.2.2. UCIQE(水下图像彩色质量评估)
def calculate_uciqe(self, img):
lab = cv2.cvtColor(img, cv2.COLOR_RGB2LAB)
l, a, b = cv2.split(lab)
chroma = np.sqrt(np.square(a) + np.square(b))
uc = np.mean(chroma)
sc = np.sqrt(np.mean(np.square(chroma - uc)))
cont = np.max(l) - np.min(l)
return 0.4680 * sc + 0.2745 * cont + 0.2576 * uc4.2.3. UIQM(水下图像质量度量)
def calculate_uiqm(self, img):
hsv = cv2.cvtColor(img, cv2.COLOR_RGB2HSV)
h, s, v = cv2.split(hsv)
uicm = np.mean(s)
uism = cv2.Laplacian(v, cv2.CV_64F).var()
uiconm = np.std(v)
return 0.0282 * uicm + 0.2953 * uism + 0.6765 * uiconm5. 技术特点与创新
5.1 架构创新
- 双重注意力机制(空间+通道)
- 残差学习与深度特征提取
- 多阶段图像增强处理
5.2 训练优化
- 自适应学习率调整
- 批归一化加速收敛
- 多尺度特征融合
5.3 评估体系
- 多维度质量评估
- 自动化测试流程
- 可视化结果展示
6. 应用价值
6.1 科研应用
- 提供完整的实验评估体系
- 支持模型性能对比研究
- 生成研究所需的数据分析
6.2 工程实践
- 支持批量图像处理
- 提供直观的效果展示
- 易于集成到现有系统
6.3 持续优化
- 模块化设计便于升级
- 完善的评估反馈
- 灵活的配置调整
7. 总结与展望
本系统通过综合运用深度学习技术,实现了高效的水下图像增强功能。系统的模块化设计和完善的评估体系为后续的优化和扩展提供了良好基础。未来可以在以下方面继续改进:
1. 引入更多先进的网络结构
2. 优化训练策略和损失函数
3. 扩展评估指标体系
4. 提升处理效率和实时性能
通过持续的优化和改进,系统将能够更好地服务于水下图像处理的各种应用场景。


















 778
778

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









