






vrep/coppeliasim与MATLAB联合仿真机械臂抓取
机器人建模仿真 运动学动力学直线圆弧笛卡尔空间轨迹规划,多项式函数关节空间轨迹规划
ur5协作机器人抓取/机械臂流水线搬运码垛
ID:97135770899305929
远在咫尺
探讨V-REP Coppeliasim与MATLAB联合仿真在机械臂抓取及流水线搬运码垛中的应用:从建模到轨迹规划的技术分析
一、引言
随着工业机器人技术的飞速发展,机械臂的建模、仿真及轨迹规划成为了研究的热点。V-REP Coppeliasim与MATLAB的联合仿真,为机械臂的研究与开发提供了强大的工具。本文将围绕这一主题,探讨其在机械臂抓取及流水线搬运码垛中的应用,涉及运动学和动力学分析,以及直线圆弧和笛卡尔空间轨迹规划,多项式函数关节空间轨迹规划等内容。
二、机械臂建模与仿真
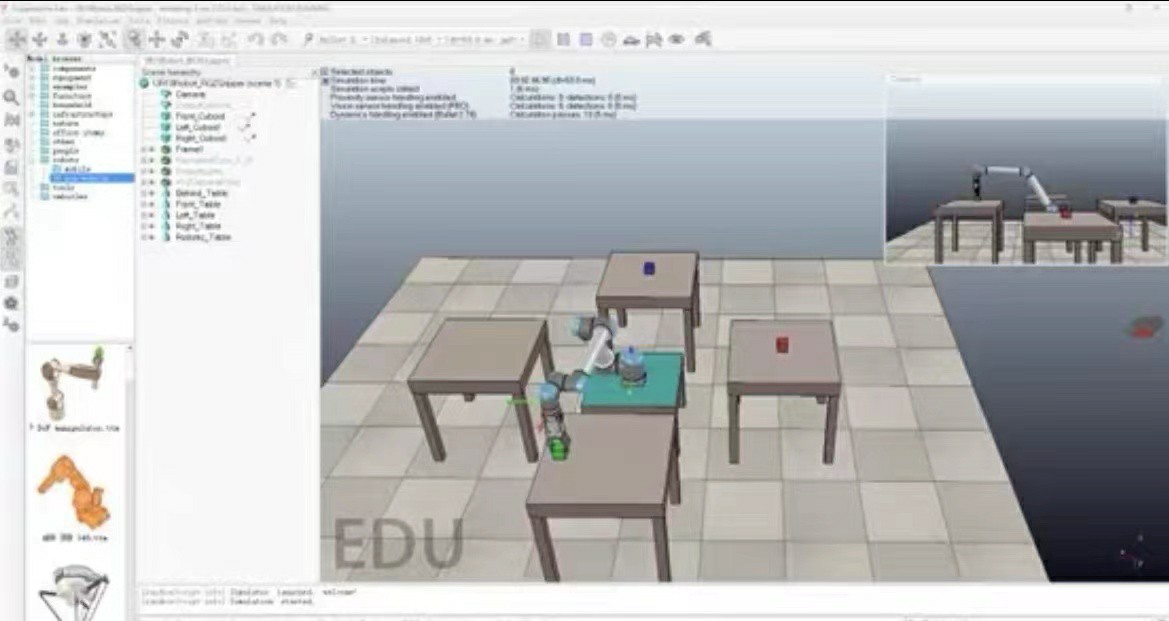
(一)V-REP Coppeliasim建模工具介绍
V-REP Coppeliasim是一款功能强大的机器人仿真软件,其丰富的插件和开源的特性使得它在机器人建模与仿真方面具有很高的灵活性。我们可以利用它来构建各种复杂的机械系统,进行运动学和动力学仿真。
(二)MATLAB在仿真中的应用
MATLAB作为一款强大的数学计算软件,其在机器人仿真中的应用也是不可忽视的。我们可以利用MATLAB进行数据处理、算法开发以及仿真结果的可视化展示。通过与V-REP Coppeliasim的联合仿真,可以实现更高效、更准确的仿真分析。
三、机械臂轨迹规划
(一)直线圆弧轨迹规划
在机械臂抓取和搬运任务中,直线圆弧轨迹规划是最常见的规划方式之一。我们可以根据任务需求,通过数学方法计算出机械臂的运动轨迹,使其在抓取和搬运过程中能够快速、准确地完成任务。
(二)笛卡尔空间轨迹规划
笛卡尔空间轨迹规划是一种基于空间坐标系的轨迹规划方式。在这种规划方式下,我们可以直接定义机械臂在三维空间中的运动轨迹,然后通过逆运动学计算得到关节空间的运动参数。这种规划方式具有直观、易实现的优点。
(三)多项式函数关节空间轨迹规划
多项式函数关节空间轨迹规划是一种基于关节空间的轨迹规划方式。通过设计合适的多项式函数,我们可以实现对机械臂关节运动的精确控制。这种规划方式在要求平滑、连续的运动轨迹的场景中具有较好的应用前景。
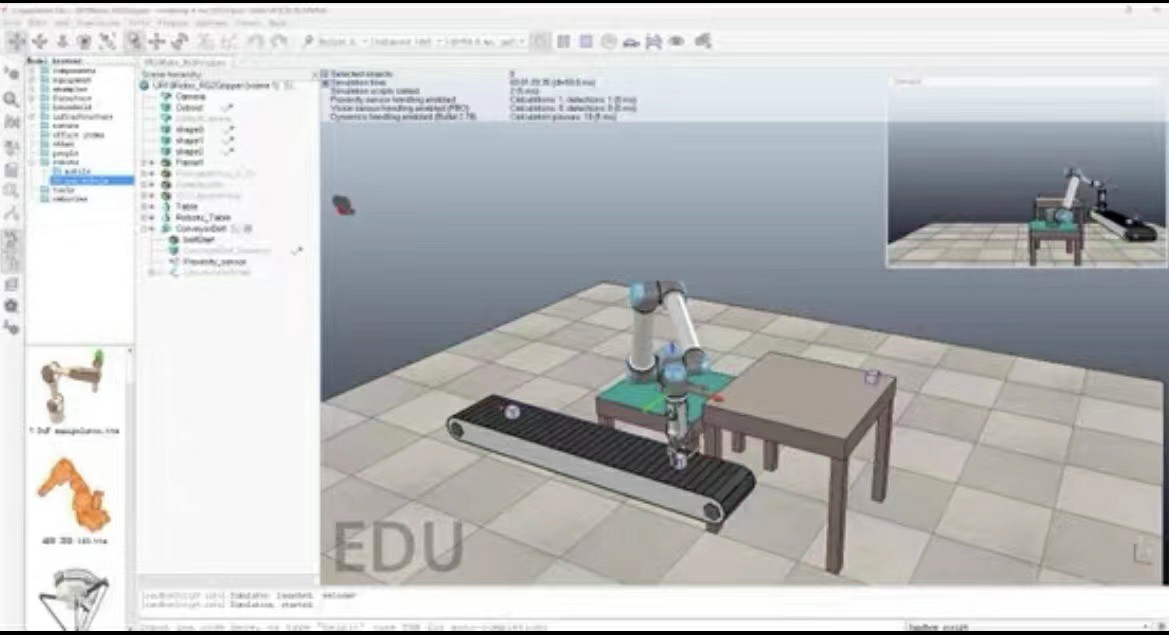
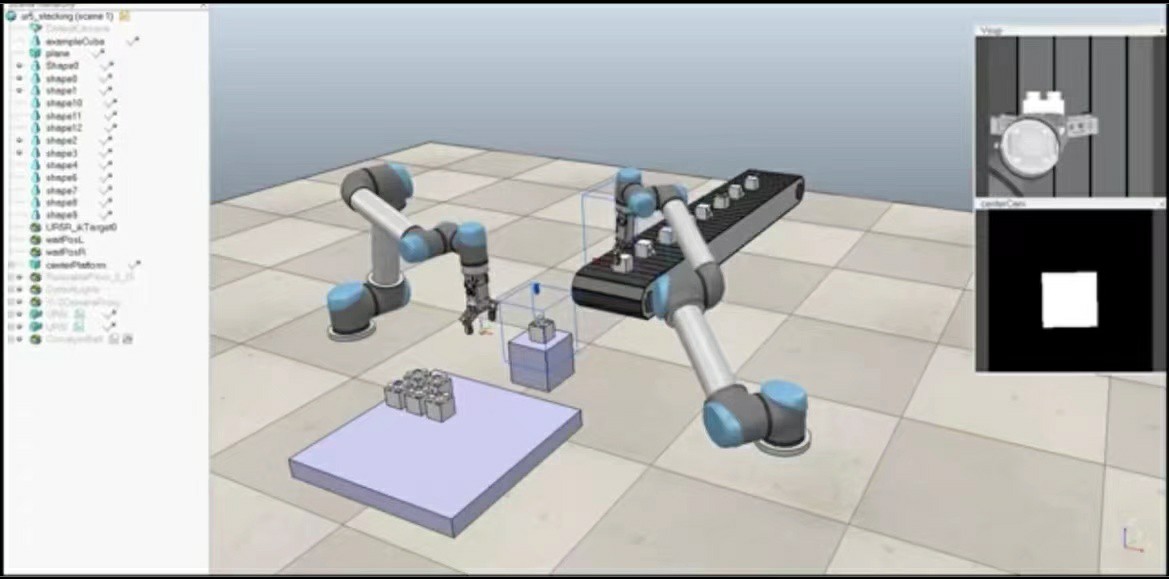
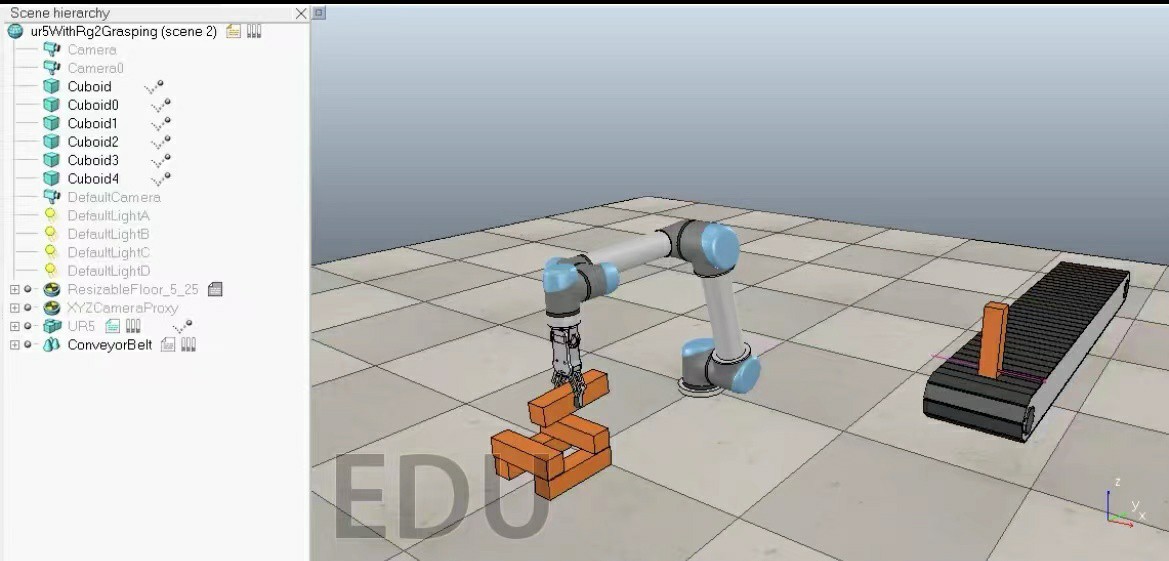
四、UR5协作机器人在抓取与流水线搬运码垛中的应用
UR5协作机器人作为一种常见的工业协作机器人,其在抓取和流水线搬运码垛任务中具有广泛的应用。通过合理的建模、仿真及轨迹规划,UR5协作机器人可以实现对物体的精确抓取和搬运,提高生产效率。
五、结论
本文详细探讨了V-REP Coppeliasim与MATLAB联合仿真在机械臂抓取及流水线搬运码垛中的应用。通过建模、仿真及轨迹规划等方面的分析,我们可以看到这种联合仿真的优势和应用前景。未来,随着技术的不断发展,我们期待看到更多的创新应用和技术突破。
相关的代码,程序地址如下:http://matup.cn/770899305929.html
















 287
287

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









