






Webots轮腿机器人,轮足机器人,五杆双足轮式机器人仿真,并联腿结构仿真。
代码是c编写的,有详细的注释。
提供完整模型以及代码。
涉及PID和运动学逆解,实现运动控制。
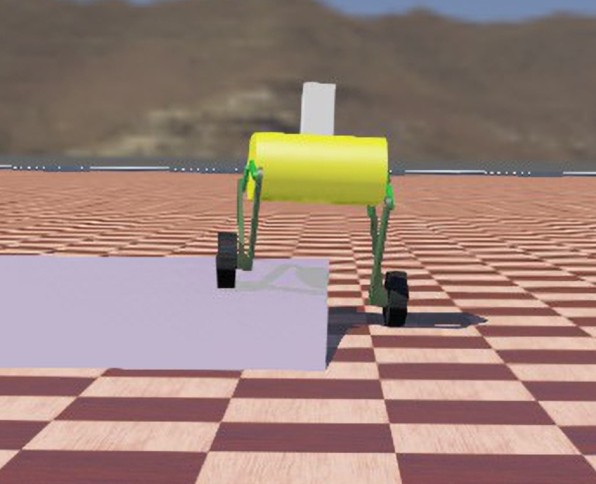
可以通过使用键盘按键实现前进,后退,左转,右转,原地转向,抬升,降落,跳跃动作并调速,同时在运动过程中可以调节双腿高度保持平衡等功能。
提供代码的注释
ID:97120770802154196
想要一包辣条
Webots中轮腿机器人、轮足机器人及复杂机构的仿真探索——以五杆双足轮式机器人为例
一、引言
随着科技的发展,机器人技术尤其是仿真技术在现代科研领域扮演着越来越重要的角色。Webots作为一款强大的机器人仿真软件,广泛应用于各类机器人的设计与验证。本文将重点探讨在Webots中轮腿机器人、轮足机器人以及五杆双足轮式机器人的仿真实现。我们将涉及PID和运动学逆解在机器人运动控制中的应用,以及如何通过键盘操作实现多种动作和调节功能。
二、轮腿机器人与轮足机器人的仿真概述
Webots为轮腿机器人和轮足机器人的仿真提供了强大的工具和丰富的库函数。这两种机器人类型结合了轮子与腿的各自优势,展现出极高的灵活性和适应性。通过仿真,我们可以有效地验证设计思路,优化性能,并为实际制造提供有力支持。
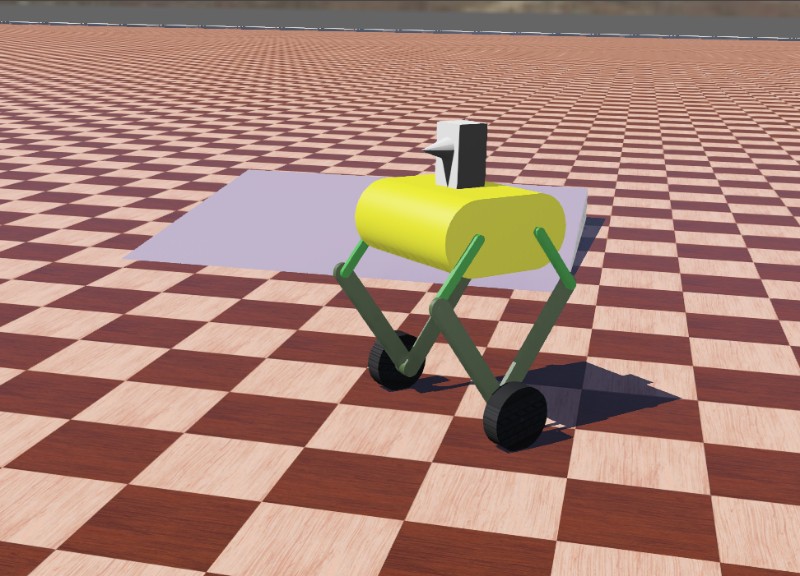
三、五杆双足轮式机器人的仿真挑战与实现
五杆双足轮式机器人是一种复杂的机构,其仿真既需要处理复杂的运动学问题,也需要考虑动力学和稳定性因素。我们利用Webots创建模型,结合C语言编程,详细注释代码,实现了该机器人的仿真。通过PID控制算法,我们实现了对机器人的精确控制。此外,结合运动学逆解技术,我们能够更有效地调整机器人姿态,保证其稳定性和灵活性。
四、详细分析——代码实现与功能介绍
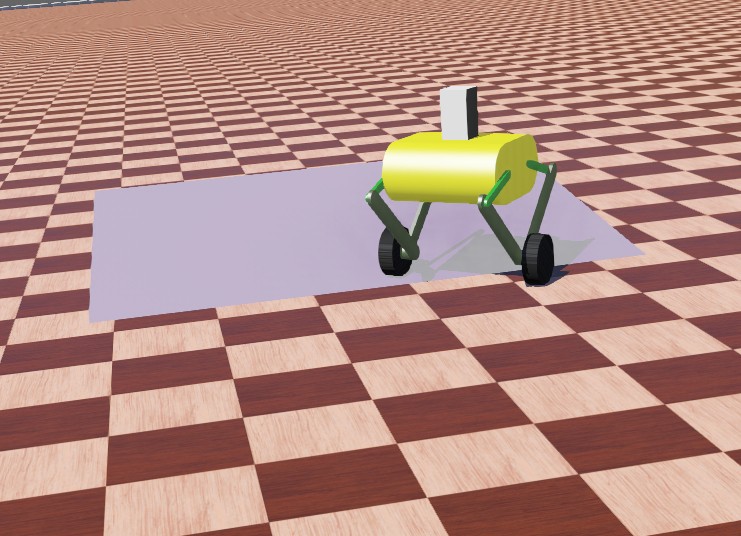
我们提供了完整的模型以及详细注释的代码。通过键盘按键实现机器人的前进、后退、左转、右转、原地转向、抬升、降落和跳跃等动作。代码中详细阐述了如何通过PID算法实现对机器人运动的精确控制,并通过调整参数来实现速度的调整。同时,我们还实现了双腿高度的调节功能,以维持机器人在运动过程中的平衡。这些功能的实现都离不开对代码精细的编写和调试。
五、运动控制中的PID与运动学逆解解析
PID控制算法在机器人运动控制中扮演着关键角色,其通过不断调节控制参数使得机器人能够快速且准确地达到预设目标。而运动学逆解则是通过已知机器人的关节状态来求解其末端执行器的位置和姿态,这对于实现机器人的精确控制和路径规划至关重要。在五杆双足轮式机器人的仿真中,我们结合两者实现了对机器人的高效控制。
六、结论与展望
通过Webots仿真软件以及C语言的结合,我们成功实现了对轮腿机器人、轮足机器人以及五杆双足轮式机器人的仿真。这不仅验证了我们的设计思路,也为我们后续的研究提供了宝贵的经验。未来,我们将继续探索更复杂机构的仿真方法,优化算法,提高机器人的性能。
七、致谢
感谢Webots团队为我们提供的强大工具,也感谢各位同行提供的宝贵意见和建议。希望我们的经验能为其他研究者带来启示和帮助。
相关的代码,程序地址如下:http://matup.cn/770802154196.html
















 851
851

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









