






一.作者小课堂
(一)中断
1.中断的概念
计算机在执行程序过程中,当出现异常情况(断电等)或特殊请求(数据传输等)时,计算机暂停现行程序的运行,转向对这些异常情况或特殊请求进行处理,处理完毕后再返回到现行程序的中断处,继续执行原程序,这就是“中断”。
2.中断处理过程
(1)单重中断的中断处理流程

(2)多重中断的中断处理流程

中断处理过程

(二)STM32F103微控制器
1.优先级概念
STM32使用Cortex-M3的8位优先级寄存器中的4位来配置中断优先级,即STM32中的NVIC只支持16级中断优先级的管理。
NVIC中断配置的相关函数存放在标准外设库misc.c和misc.h文件中,共定义了5个相关函数及NVIC初始化结构体
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);
void NVIC_SetVectorTable(uint32_t NVIC_VectTab, uint32_t Offset);
void NVIC_SystemLPConfig(uint8_t LowPowerMode, FunctionalState NewState);
void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource);
用于设置中断的优先级分组,此函数只有一个参数NVIC_PriorityGroup,其取值共有5组,每组的抢占优先级和响应优先级所占位数均不同,取值范围不同。
| NVIC_PriorityGroup | 抢占优先级 取值范围 | 响应优先级 取值范围 | 描述 |
| NVIC_PriorityGroup_0 | 0 | 0~15 | 抢占优先级占0位, 响应优先级占4位 |
| NVIC_PriorityGroup_1 | 0,1 | 0~7 | 抢占优先级占1位, 响应优先级占3位 |
| NVIC_PriorityGroup_2 | 0,1,2,3 | 0,1,2,3 | 抢占优先级占2位, 响应优先级占2位 |
| NVIC_PriorityGroup_3 | 0,1,2,3,4,5,6,7 | 0,1 | 抢占优先级占3位, 响应优先级占1位 |
| NVIC_PriorityGroup_4 | 0~15 | 0 | 抢占优先级占4位, 响应优先级占0位 |
2.中断向量表
当发生了异常或中断,内核要想响应这些异常或中断,就需要知道这些异常或中断的服务程序的入口地址,再由入口地址找到相应的中断服务程序,由中断入口地址组成的表称作中断向量表。
入口地址一般存放在程序存储器(ROM),默认情况下,Cortex-M3内核的中断向量表从零地址处开始,且每个向量占用4个字节。

STM32在标准外设库stm32f10x.h文件中,通过宏定义将中断通道号(中断号)与宏名联系起来,这样在使用中断时,直接引用宏名即可。
typedef enum IRQn
{
/*Cortex-M3 Processor Exceptions Numbers */
NonMaskableInt_IRQn= -14,
/*!< 2 Non Maskable Interrupt */
MemoryManagement_IRQn= -12,
/*!< 4 Cortex-M3 Memory Management Interrupt */
BusFault_IRQn = -11,
/*!< 5 Cortex-M3 Bus Fault Interrupt */
……
} IRQn_Type;
3.EXTI标准外设库中断配置步骤
(1)GPIO初始化配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
//初始化I/O口为浮空输入模式
(2)开启I/O端口的时钟和复用时钟
GPIO用作EXTI外部中断功能引脚,必须开启复用功能,打开相应引脚的AFIO时钟,通过调用RCC_APB2PeriphClockCmd()函数实现:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE|RCC_APB2Periph_AFIO,ENABLE);(3)设置I/O引脚与中断线路的映射关系
GPIO引脚作为中断功能引脚用来触发外部中断时,需将GPIO的引脚与相应的中断线关联在一起,使用库函数GPIO_EXTILineConfig来实现这种映射关系。如
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource3);(4) 初始化EXTI,配置EXTI相关参数并使能
EXTI_InitStructure.EXTI_Line = EXTI_Line3; //设置外部中断线3中断
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
//设置为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;
//设置为下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //使能该外部中断线
EXTI_Init(&EXTI_InitStructure);
二.实践出真知
(一)实验要求
1.实验一
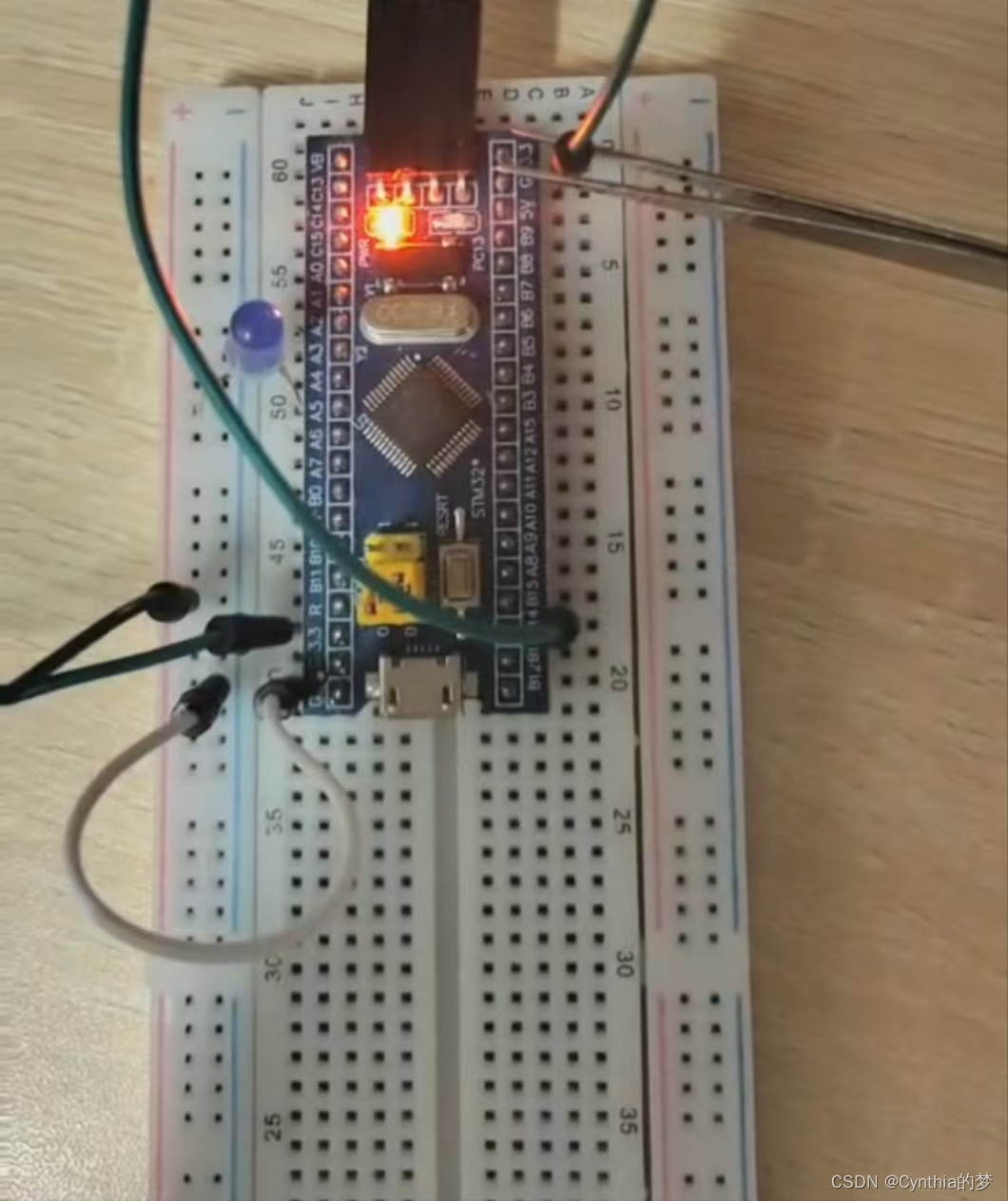
用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。如果完成后,尝试在main函数while循环中加入一个串口每隔1s 发送一次字符的代码片段,观察按键中断对串口发送是否会带来干扰或延迟。
2.实验二
①
当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”(提示:采用一个全局标量做信号灯)
②
当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”(提示:要将接收到的连续字符保存到一个字符数组里,进行判别匹配。写一个接收字符串的函数。
(二)实验过程
1.代码
(1)实验一
LED.c
#include "stm32f10x.h" // Device header
/**
* 函 数:LED初始化
* 参 数:无
* 返 回 值:无
*/
void LED_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}exti_key.c
#include "exti_key.h"
#include "misc.h"
void EXTI_Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; // 使用 B 口的引脚 1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; // 使用与 GPIOB 引脚 1 相关的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_ClearITPendingBit(EXTI_Line1);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); // 将 GPIOB 和引脚 1 配置为外部中断
EXTI_InitStructure.EXTI_Line = EXTI_Line1;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}main.c
#include "stm32f10x.h" // Device header
#include "LED.h"
#include "exti_key.h"
int main(void)
{
LED_Init();
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
EXTI_Key_Init();
while (1)
{
}
}
//void EXTI1_IRQHandler(void)
//{
// if(EXTI_GetITStatus(EXTI_Line1) != RESET)
// {
// GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)((1-GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_0))));
// EXTI_ClearITPendingBit(EXTI_Line1);
// }
//}
//两种方法
uint8_t led = 1;
void EXTI1_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line1) != RESET)
{
led = ~led; //状态翻转
//如果等于1,则PB1复位点亮,否则置1熄灭
if(led == 1)
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
else
GPIO_SetBits(GPIOA,GPIO_Pin_0);
}
EXTI_ClearITPendingBit(EXTI_Line1); //清除EXTI1的中断标志位
}(2)实验二
①
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>
volatile uint8_t send_enabled = 0; // 全局变量,控制发送行为
void USART_Configuration(void) {
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 打开 GPIO 与 USART 端口的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
// 配置 USART1 Tx (PA.09) 为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置 USART1 Rx (PA.10) 为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置 USART 参数
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 使能 USART
USART_Cmd(USART1, ENABLE);
// 使能接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
// 配置 NVIC
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void USART1_IRQHandler(void) {
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
char data = USART_ReceiveData(USART1);
if(data == 's') { // 接收到 's' 停止发送
send_enabled = 0;
} else if (data == 't') { // 接收到 't' 开始发送
send_enabled = 1;
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
void Delay(__IO uint32_t nCount) {
for(; nCount != 0; nCount--);
}
int main(void) {
SystemInit();
USART_Configuration();
char *str = "hello windows!\r\n";
while(1) {
if(send_enabled) {
for(uint32_t i = 0; i < strlen(str); i++) {
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, str[i]);
}
}
Delay(5000000);
}
}②
NVIC.c
#include "stm32f10x.h" // Device header
void NVIC_Configuration(void) {
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
/**
* 函 数:串口初始化
* 参 数:无
* 返 回 值:无
*/
void Serial_Init(void)
{
/*开启时钟*/
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
// USART Tx (PA.09) 配置为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// USART Rx (PA.10) 配置为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启接收中断
USART_Cmd(USART1, ENABLE);
}main.c
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>
#include "Delay.h"
#include "Serial.h"
#include "NVIC.h"
#define BUFFER_SIZE 100
volatile char buffer[BUFFER_SIZE];
volatile int buffer_index = 0;
volatile int send_enabled = 0;
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
char data = (char)USART_ReceiveData(USART1);
if (buffer_index < BUFFER_SIZE - 1) {
buffer[buffer_index++] = data;
buffer[buffer_index] = '\0'; // 保持字符串结尾
char* temp_buffer = (char*)buffer; // 创建一个非 volatile 指针
if (strstr(temp_buffer, "stop stm32!") != NULL) {
send_enabled = 0;
buffer_index = 0; // 清空缓冲区
} else if (strstr(temp_buffer, "go stm32!") != NULL) {
send_enabled = 1;
buffer_index = 0; // 清空缓冲区
}
}
}
}
int main(void) {
SystemInit();
Serial_Init();
NVIC_Configuration();
char *str = "hello windows!\r\n";
while (1) {
if (send_enabled) {
for (uint32_t i = 0; i < strlen(str); i++) {
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, str[i]);
}
}
Delay_ms(500);
}
}2.实验结果
(1)实验一
















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









