







 文章介绍了TB6612FNG电机驱动芯片,它能控制两个电机,支持1.2A至3.2A的工作电流。通过单片机设置AIN1、AIN2、BIN1、BIN2引脚的电平来控制电机正反转。文中提供了一个示例,展示如何用定时器1产生PWM信号,控制电机的正反转,并通过改变占空比观察电机运行效果。
文章介绍了TB6612FNG电机驱动芯片,它能控制两个电机,支持1.2A至3.2A的工作电流。通过单片机设置AIN1、AIN2、BIN1、BIN2引脚的电平来控制电机正反转。文中提供了一个示例,展示如何用定时器1产生PWM信号,控制电机的正反转,并通过改变占空比观察电机运行效果。
TB6612FNG简介
单片机引脚的电流一般只有几十个毫安,无法驱动电机,因此一般是通过单片机控制电机驱动芯片进而控制电机。TB6612是比较常用的电机驱动芯片之一。
TB6612FNG可以同时控制两个电机,工作电流1.2A,最大电流3.2A。
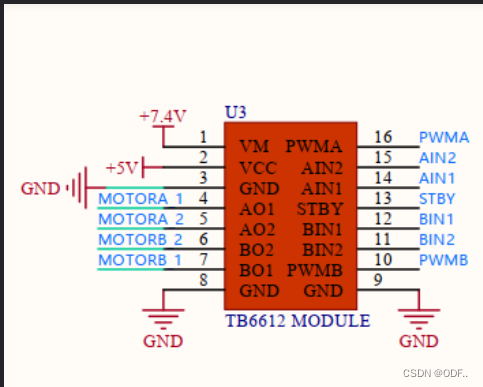
- VM电机电源正极,是驱动电压输入端(>10V),
- VCC为逻辑电平输入端(2.7V~5.5V)。
- PWMA/PWMB为两个电机提供pwm脉冲,也就是控制电机的速度。
- AIN1/AIN2,BIN1/BIN2.控制电机的正反转和停止
只需改变AIN1、AIN2、BIN1、BIN2的高低电平就可实现电机的正反转。

- STBY可以理解为一个使能端口,高电平有效。
- AO1和AO2是电机A的输入电压,也就是这两个口接电机的正负极
- BO1和BO2是电机A的输入电压,也就是这两个口接电机的正负极
工程创建:
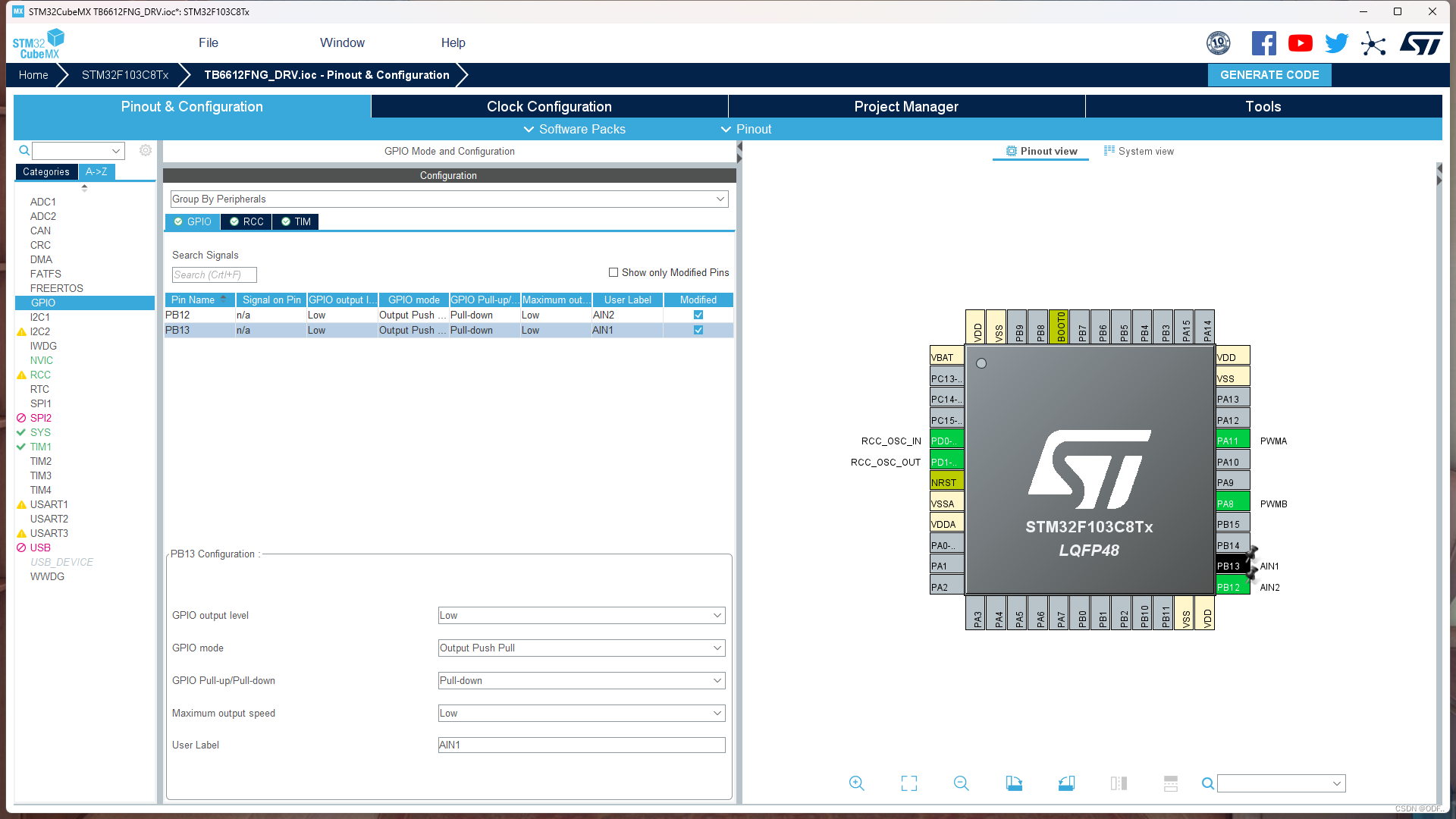
这里我只驱动一个电机,先设置一下正反转的控制引脚。
然后用定时器1来输出两路的PWM(其实只需要用到一路,不过下意识设置了两个,懒得改了)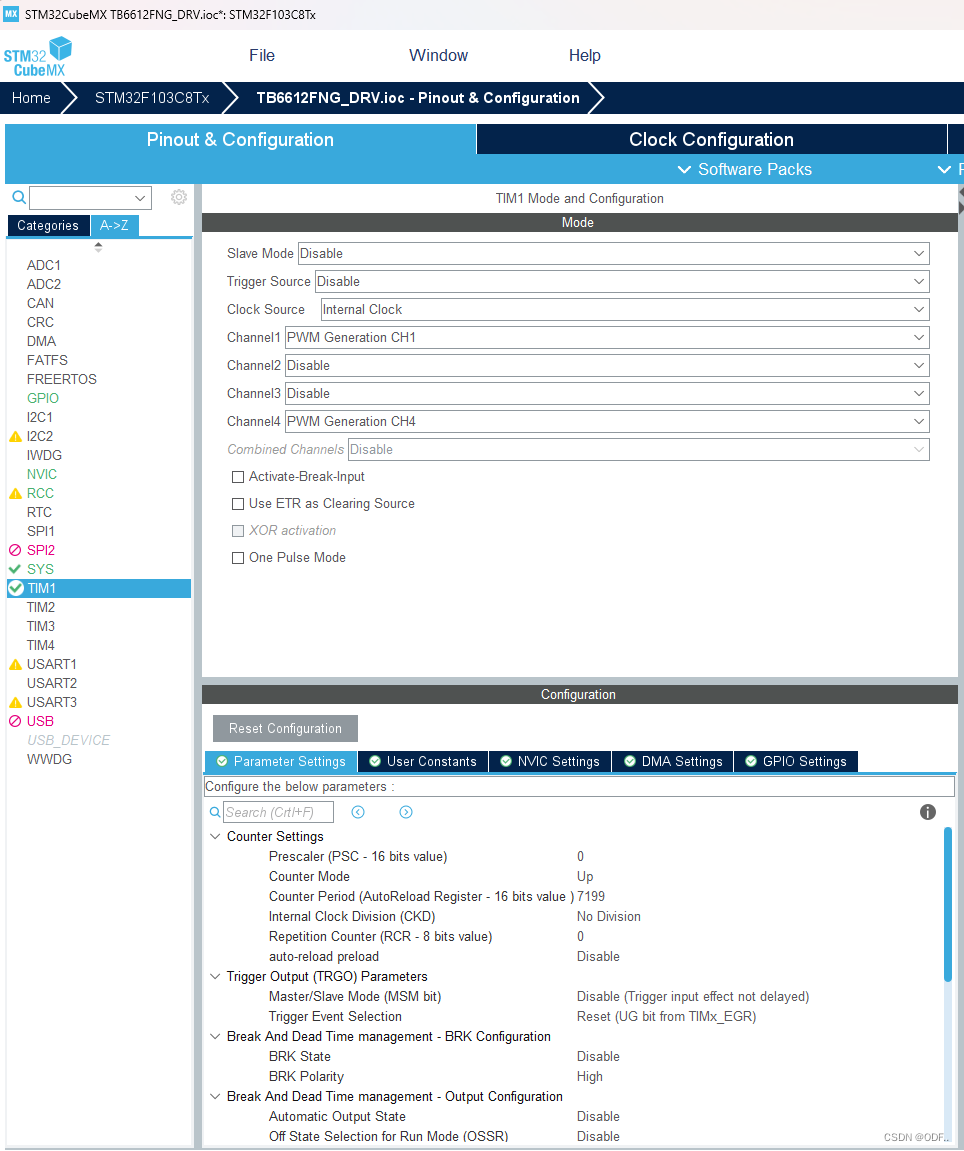
PWMA配置
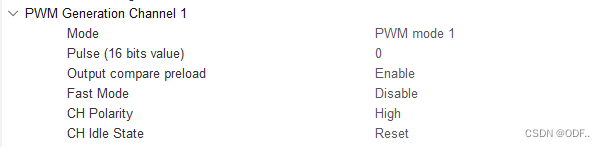
PWMB配置
配置下中断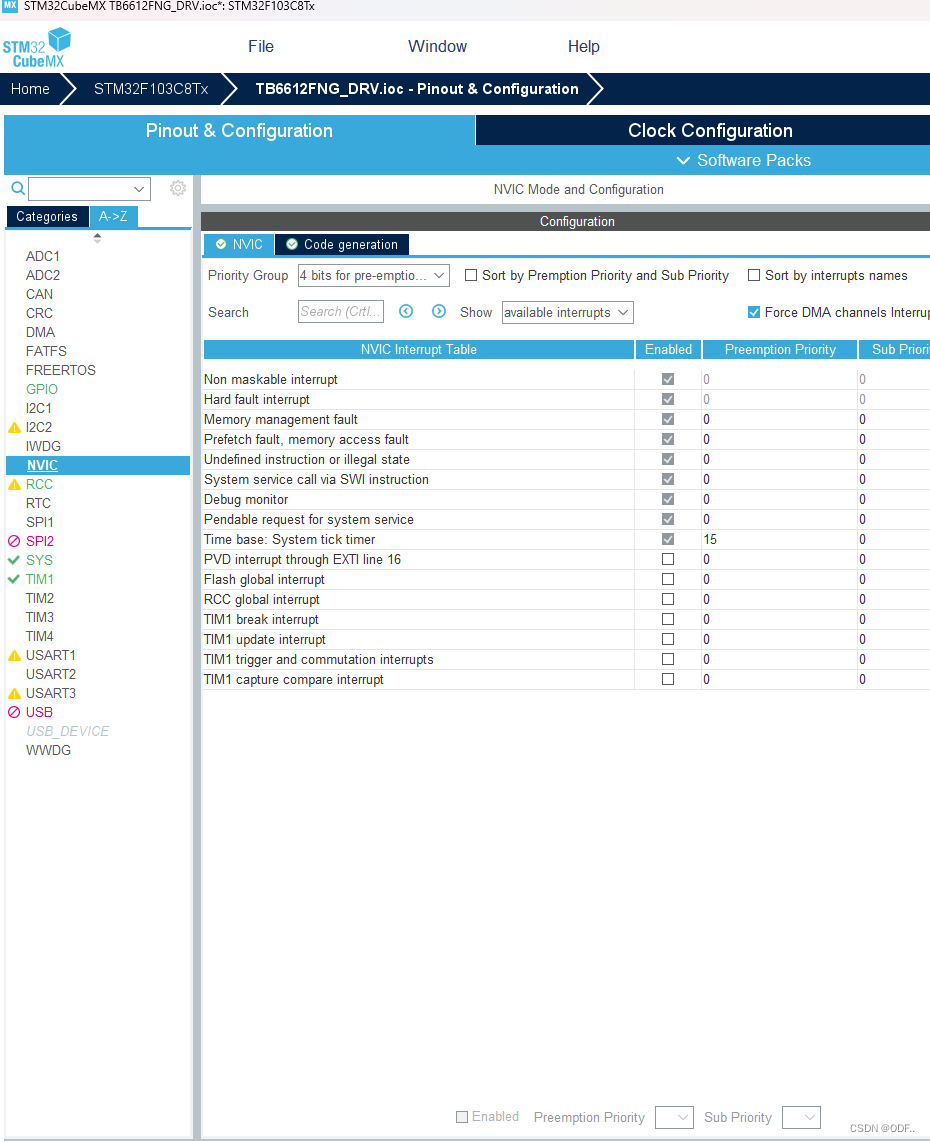
工程代码
在主函数初始化
//打开定时器
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);
//设置AIN1 和AIN2 让电机A反转
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET);在循环里面,不断改变占空去看电机效果
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET);
for(int i=0;i<7100;i++)
{
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,i);
HAL_Delay(1);
}
for(int j=7100;j>0;j--)
{
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,j);
HAL_Delay(1);
}
















 2396
2396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









