









基于深度学习的自动驾驶目标检测系统
摘要
随着人工智能技术的快速发展,自动驾驶技术已成为当今研究的热点。目标检测作为自动驾驶技术的核心部分,对于确保行车安全和提升驾驶体验至关重要。本文提出了一种基于深度学习的自动驾驶目标检测系统,旨在提高目标检测的准确性和实时性,为自动驾驶技术的发展提供有力支持。
关键词:深度学习;自动驾驶;目标检测;卷积神经网络
一、引言
自动驾驶技术作为智能交通系统的重要组成部分,其研究与应用具有广泛的前景。目标检测作为自动驾驶技术中的关键环节,主要负责对道路环境中的行人、车辆、交通标志等目标进行准确识别与定位。传统的目标检测方法往往依赖于手工设计的特征和复杂的模型,难以适应复杂多变的道路环境。因此,研究基于深度学习的自动驾驶目标检测系统具有重要意义。
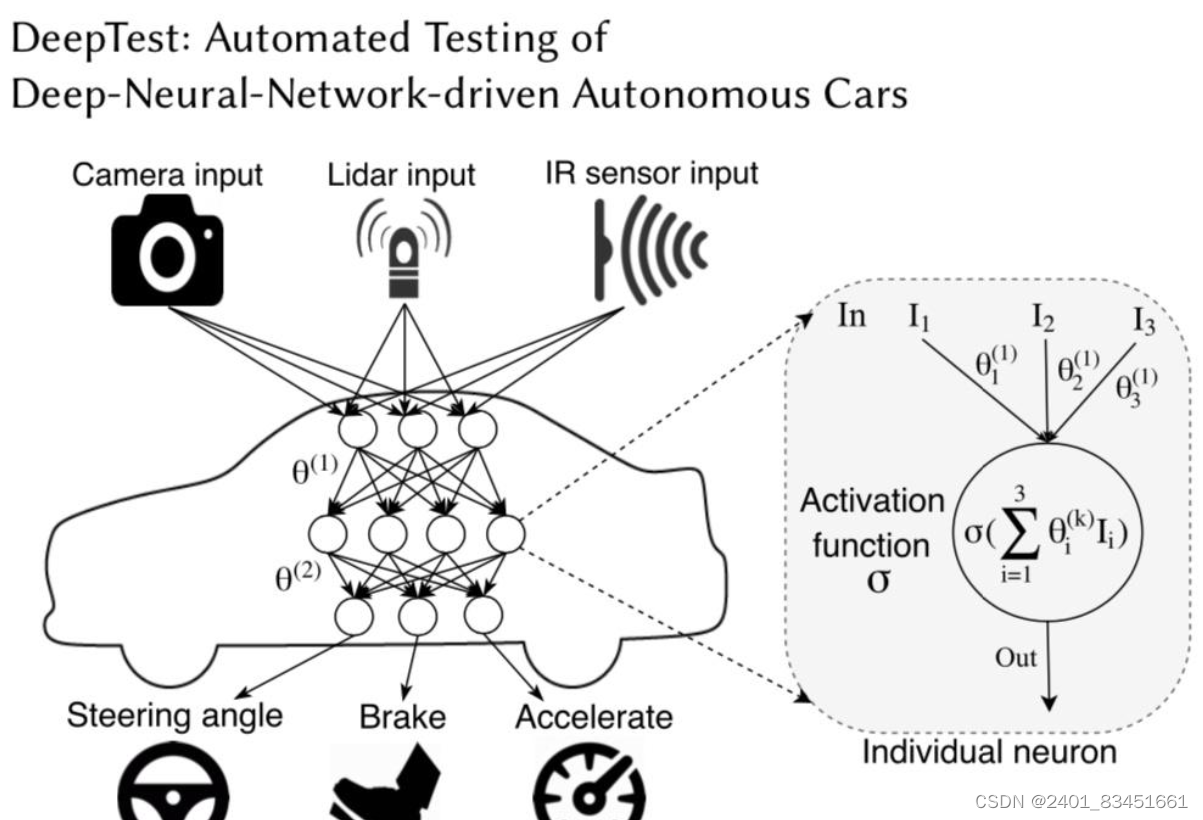
二、深度学习在目标检测中的应用
深度学习技术,特别是卷积神经网络(CNN)的发展,为目标检测带来了革命性的变化。CNN具有强大的特征学习能力,可以自动提取目标的高层次特征,从而提高目标检测的准确性。此外,随着深度学习框架的不断优化和计算能力的提升,基于深度学习的目标检测算法在实时性方面也得到了显著提升。
三、基于深度学习的自动驾驶目标检测系统
本文提出了一种基于深度学习的自动驾驶目标检测系统。该系统主要由以下几个部分组成:数据预处理、模型构建与训练、目标检测与定位、结果输出与可视化。

1.数据预处理
数据预处理是目标检测任务中的关键步骤。本系统采用图像增强技术,对原始图像进行缩放、裁剪、旋转等操作,以扩充数据集并提高模型的泛化能力。同时,对图像进行归一化处理,以减少不同图像之间的亮度、对比度等差异对模型性能的影响。
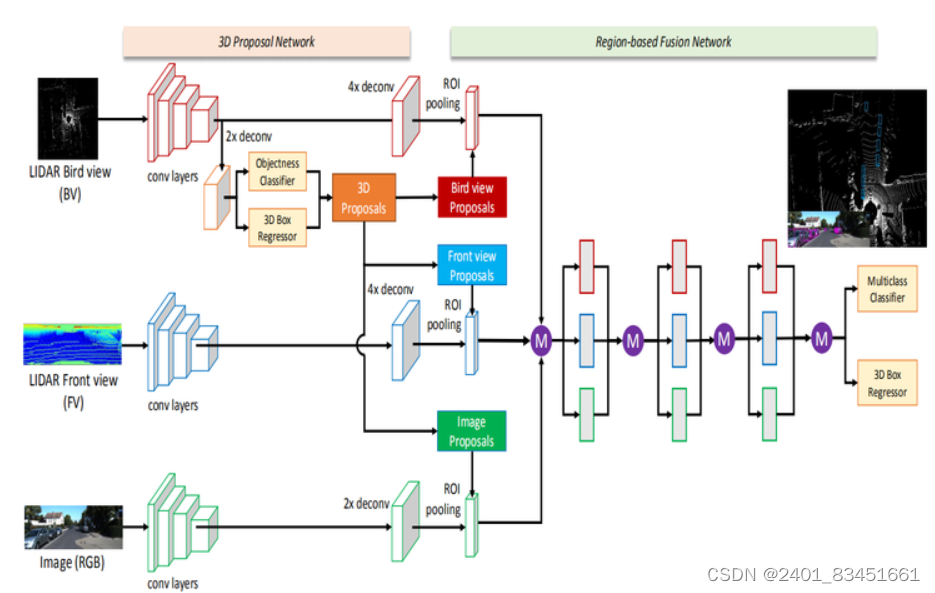
2.模型构建与训练
本系统采用基于CNN的目标检测算法,如Faster R-CNN、YOLO等。通过构建多层次的卷积、池化和全连接层,提取图像中的目标特征。利用大量标注好的数据集进行模型训练,使模型能够学习到目标的特征表示和分类能力。
3.目标检测与定位
在模型训练完成后,本系统利用训练好的模型对输入图像进行目标检测与定位。通过前向传播计算,模型输出目标的类别、边界框等信息。本系统采用非极大值抑制(NMS)等后处理技术,对检测到的目标进行筛选和优化,提高检测的准确性。
4.结果输出与可视化
本系统将检测到的目标信息以图像或文本的形式输出,便于后续处理和分析。同时,提供可视化界面,将检测结果实时展示在原始图像上,方便用户直观地了解道路环境中的目标分布情况。
四、实验与结果分析
为验证本系统的有效性,本文在多个公开数据集上进行了实验。实验结果表明,本系统具有较高的目标检测准确性和实时性,能够满足自动驾驶技术的需求。此外,本文还对实验结果进行了详细分析,探讨了不同因素对系统性能的影响。
五、结论与展望
本文提出了一种基于深度学习的自动驾驶目标检测系统,通过深度学习技术实现了对道路环境中目标的准确识别与定位。实验结果表明,该系统具有较高的准确性和实时性,为自动驾驶技术的发展提供了有力支持。未来,我们将继续优化模型结构、提高检测精度和实时性,以适应更复杂多变的道路环境。同时,我们还将探索多传感器融合、多目标跟踪等关键技术,为自动驾驶技术的进一步发展奠定基础。
开源代码
链接: https://pan.baidu.com/s/1OilMZdgRlxsLdH2Ul5IGvA?pwd=anxk 提取码: anxk
更多YOLO系列源码
VX: AI_xiaoao
回复:基于YOLOv8的XXXX系统 即可获取
所有代码均可远程部署安装+代码调试及讲解

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









