







1 二叉搜索树(BST)
一颗二叉搜索树 (BST)是以一颗二叉树来组织的,可以使用一个链表数据结构来表示,其中,每个结点就是一个对象,包含数据内容key以及left、right和p分别指向结点的左孩子、右孩子和双亲。如果某个孩子结点和父节点不存在,则相应属性的值为空(NIL)。
二叉搜索树中的关键字key的存储方式总是满足二叉搜索树的性质:
设x是二叉搜索树中的一个结点。如果y是x左子树中的一个结点,那么会有y.key<=x.key;如果y是x右子树中的一个节点,那么有y.key>=x.key。
1.1 二叉搜索树查找:
顾名思义,二叉搜索树很多时候用来进行数据查找。这个过程从树的根结点开始,沿着一条简单路径一直向下,直到找到数据或者得到NIL值。
如下图所示:
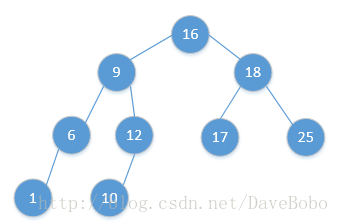
由图可以看出,对于遇到的每个结点x,都会比较x.key与k的大小,如果相等,就终止查找,否则,决定是继续往左子树还是右子树查找。因此,整个查找过程就是从根节点开始一直向下的一条路径,若假设树的高度是h,那么查找过程的时间复杂度就是O(h)。
BST查找的递归算法与非递归算法伪代码分别如下:
//递归实现
Tree_Search(x, k):
if x == NIL or x.key == k :
return x
if k < x.key
return Tree_Search(x.left, k)
else return Tree_Search(x.right, k) //非递归迭代实现
Tree_Search(x, k) :
while x!=NIL and k!=x.key:
if k < x.key
x = x.left
else x = x.right
return x 一般来说,对于大多数计算机,迭代方式的效率比递归方式高很多。
1.2 前驱和后继:
首先看下某节点前驱和后继节点的定义。一个节点的
前驱结点:节点val值小于该节点val值并且值最大的节点
后继节点:节点val值大于该节点val值并且值最小的节点
对于给定的一棵二叉搜索树,如果所有结点的key均不相同,那么结点x的前驱是指小于x.key的最大关键字的结点;而一个结点x的后继是指大于x.key的最小关键字的结点。
现在,我们考虑如何求解一个结点x的后继,(求前驱也类似,对称的结构):
对于结点x,如果其右子树不为空,那么x的后继一定是其右子树的最左边的结点。而如果x的右子树为空,并且有一个后继,那么其后继必然是x的最底层的祖先,并且后继的左孩子也是x的一个祖先,因此,为了找到这样的后继结点,只需要从x开始沿着树向上移动,直到遇到一个结点,这个结点是它的双亲的左孩子。(例如,在上图的例子中,结点12的后继结点是16.)
给出求后继结点的伪代码:
Tree_Successor(x):
if x.right != NIL
return Tree_MinNode(x.right)
y = x.p
while y!=NIL and x == y.right
x = y
y = y.p
return y Tree_MinNode(x):
while x.left != NIL
x = x.left
return x 1.3 BST插入
BST的插入过程非常简单,很类似与二叉树搜索树的查找过程。当需要插入一个新结点时,从根节点开始,迭代或者递归向下移动,直到遇到一个空的指针NIL,需要插入的值即被存储在该结点位置。这里给出迭代插入算法,递归方式的比较简单。
Tree_Insert(T, z):
y = NIL
x = T.root
while x != NIL
y = x
if z.key < x.key
x = x.left
else x = x.right
z.p = y
if y == NIL
T.root = z
else if z.key < y.key
y.left = z
else y.right = z 下图给出插入结点17的示意图:
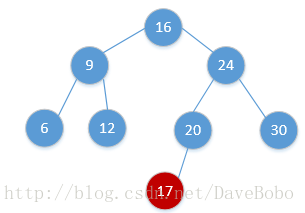
同其他搜索树类似于,二叉搜索树(BST)的插入操作的时间复杂度为O(h).
1.4 BST删除
二叉搜索树的结点删除比插入较为复杂,总体来说,结点的删除可归结为三种情况:
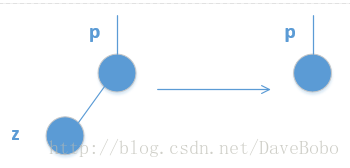
1、 如果结点z没有孩子节点,那么只需简单地将其删除,并修改父节点,用NIL来替换z;
2、 如果结点z只有一个孩子,那么将这个孩子节点提升到z的位置,并修改z的父节点,用z的孩子替换z;
3、 如果结点z有2个孩子,那么查找z的后继y,此外后继一定在z的右子树中,然后让y替换z。
这三种情况中,1和2比较简单,3相对棘手。
我们通过示意图,描述这几种情况:
情况1:
情况2:
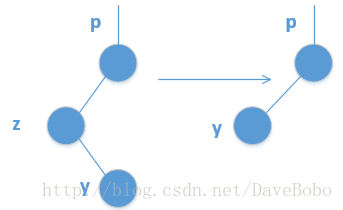
情况3:
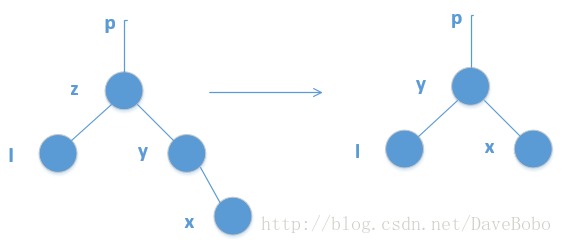
可分为两种类型,一种是z的后继y位于其右子树中,但没有左孩子,也就是说,右孩子y是其后继。如下:
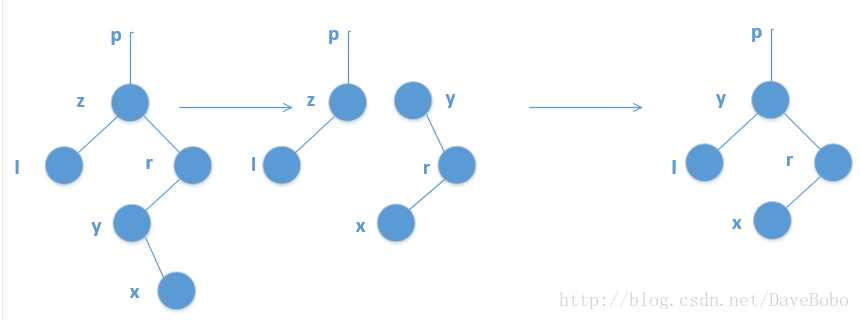
另外一种类型是,z的后继y位于z的右子树中,但并不是z的右孩子,此时,用y的右孩子替换y,然后再用y替换z。如下:
1.5 二叉树的遍历:
最后,我们考虑二叉搜索树的遍历。
二叉搜索树的性质允许通过简单的递归算法来输出树中所有的关键字,有三种方式:先序遍历、中序遍历、后序遍历。其中,先序遍历中输出根的关键字在其左右子树的关键字之前;中序遍历中输出根的关键词位于其左子树的关键字和右子树的关键字之间;后序遍历中输出根的关键字在左右子树的关键字之后。
如果x是一棵有n个结点子树的根,那么调用Preorder_Tree_Walk(x)或者Inorder_Tree_Walk(x)或者Postorder_Tree_Walk(x)需要O(n)时间。
//先序遍历
Preorder_Tree_Walk(x):
if x!=NIL:
print x.key
Preorder_Tree_Walk(x.left)
Preorder_Tree_Walk(x.right)//中序遍历
Inorder_Tree_Walk(x):
Inorder_Tree_Walk(x.left)
print x.key
Inorder_Tree_Walk(x.right) //后序遍历
Postorder_Tree_Walk(x):
Postorder_Tree_Walk(x.left)
Postorder_Tree_Walk(x.right)
print x.key 2 平衡二叉树(AVL树)
平衡二叉树(Balanced Binary Tree)是二叉查找树的一个进化体,也是第一个引入平衡概念的二叉树。1962年,G.M. Adelson-Velsky 和 E.M. Landis发明了这棵树,所以它又叫AVL树。平衡二叉树要求对于每一个节点来说,它的左右子树的高度之差不能超过1,如果插入或者删除一个节点使得高度之差大于1,就要进行节点之间的旋转,将二叉树重新维持在一个平衡状态。这个方案很好的解决了二叉查找树退化成链表的问题,把插入,查找,删除的时间复杂度最好情况和最坏情况都维持在O(logN)。但是频繁旋转会使插入和删除牺牲掉O(logN)左右的时间,不过相对二叉查找树来说,时间上稳定了很多。
平衡二叉树实现的大部分过程和二叉查找树是一样的(学平衡二叉树之前一定要会二叉查找树),区别就在于插入和删除之后要写一个旋转算法去维持平衡,维持平衡需要借助一个节点高度的属性。我参考了机械工业出版社的《数据结构与算法分析-C语言描述》写了一个C++版的代码。这本书的AVLTree讲的很好,不过没有很完整的去描述。我会一步一步的讲解如何写平衡二叉树,重点是平衡二叉树的核心部分,也就是旋转算法。
第一步:节点信息
相对于二叉查找树的节点来说,我们需要用一个属性二叉树的高度,目的是维护插入和删除过程中的旋转算法。
代码如下:
//AVL树节点信息
template<class T>
class TreeNode
{
public:
TreeNode():lson(NULL),rson(NULL),freq(1),hgt(0){}
T data;//值
int hgt;//以此节点为根的树的高度
unsigned int freq;//频率
TreeNode* lson;//指向左儿子的地址
TreeNode* rson;//指向右儿子的地址
};第二步:平衡二叉树类的声明
声明中的旋转函数将在后边的步骤中详解。
代码如下:
//AVL树类的属性和方法声明
template<class T>
class AVLTree
{
private:
TreeNode<T>* root;//根节点
void insertpri(TreeNode<T>* &node,T x);//插入
TreeNode<T>* findpri(TreeNode<T>* node,T x);//查找
void insubtree(TreeNode<T>* node);//中序遍历
void Deletepri(TreeNode<T>* &node,T x);//删除
int height(TreeNode<T>* node);//求树的高度
void SingRotateLeft(TreeNode<T>* &k2);//左左情况下的旋转
void SingRotateRight(TreeNode<T>* &k2);//右右情况下的旋转
void DoubleRotateLR(TreeNode<T>* &k3);//左右情况下的旋转
void DoubleRotateRL(TreeNode<T>* &k3);//右左情况下的旋转
int Max(int cmpa,int cmpb);//求最大值
public:
AVLTree():root(NULL){}
void insert(T x);//插入接口
TreeNode<T>* find(T x);//查找接口
void Delete(T x);//删除接口
void traversal();//遍历接口
};第三步:两个辅助方法
旋转算法需要借助于两个功能的辅助,一个是求树的高度,一个是求两个高度的最大值。这里规定,一棵空树的高度为-1,只有一个根节点的树的高度为0,以后每多一层高度加1。为了解决指针NULL这种情况,写了一个求高度的函数,这个函数还是很有必要的。
代码如下:
//计算以节点为根的树的高度
template<class T>
int AVLTree<T>::height(TreeNode<T>* node)
{
if(node!=NULL)
return node->hgt;
return -1;
}
//求最大值
template<class T>
int AVLTree<T>::Max(int cmpa,int cmpb)
{
return cmpa>cmpb?cmpa:cmpb;
}第四步:旋转
对于一个平衡的节点,由于任意节点最多有两个儿子,因此高度不平衡时,此节点的两颗子树的高度差2.容易看出,这种不平衡出现在下面四种情况:
1、6节点的左子树3节点高度比右子树7节点大2,左子树3节点的左子树1节点高度大于右子树4节点,这种情况成为左左。
2、6节点的左子树2节点高度比右子树7节点大2,左子树2节点的左子树1节点高度小于右子树4节点,这种情况成为左右。
3、2节点的左子树1节点高度比右子树5节点小2,右子树5节点的左子树3节点高度大于右子树6节点,这种情况成为右左。
4、2节点的左子树1节点高度比右子树4节点小2,右子树4节点的左子树3节点高度小于右子树6节点,这种情况成为右右。
从图2中可以可以看出,1和4两种情况是对称的,这两种情况的旋转算法是一致的,只需要经过一次旋转就可以达到目标,我们称之为单旋转。2和3两种情况也是对称的,这两种情况的旋转算法也是一致的,需要进行两次旋转,我们称之为双旋转。
第五步:单旋转
单旋转是针对于左左和右右这两种情况的解决方案,这两种情况是对称的,只要解决了左左这种情况,右右就很好办了。图3是左左情况的解决方案,节点k2不满足平衡特性,因为它的左子树k1比右子树Z深2层,而且k1子树中,更深的一层的是k1的左子树X子树,所以属于左左情况。
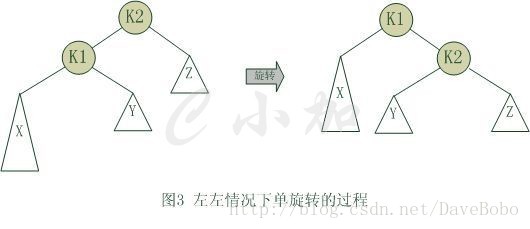
为使树恢复平衡,我们把k2变成这棵树的根节点,因为k2大于k1,把k2置于k1的右子树上,而原本在k1右子树的Y大于k1,小于k2,就把Y置于k2的左子树上,这样既满足了二叉查找树的性质,又满足了平衡二叉树的性质。
这样的操作只需要一部分指针改变,结果我们得到另外一颗二叉查找树,它是一棵AVL树,因为X向上一移动了一层,Y还停留在原来的层面上,Z向下移动了一层。整棵树的新高度和之前没有在左子树上插入的高度相同,插入操作使得X高度长高了。因此,由于这颗子树高度没有变化,所以通往根节点的路径就不需要继续旋转了。
代码如下:
//左左情况下的旋转
template<class T>
void AVLTree<T>::SingRotateLeft(TreeNode<T>* &k2)
{
TreeNode<T>* k1;
k1=k2->lson;
k2->lson=k1->rson;
k1->rson=k2;
k2->hgt=Max(height(k2->lson),height(k2->rson))+1;
k1->hgt=Max(height(k1->lson),k2->hgt)+1;
}
//右右情况下的旋转
template<class T>
void AVLTree<T>::SingRotateRight(TreeNode<T>* &k2)
{
TreeNode<T>* k1;
k1=k2->rson;
k2->rson=k1->lson;
k1->lson=k2;
k2->hgt=Max(height(k2->lson),height(k2->rson))+1;
k1->hgt=Max(height(k1->rson),k2->hgt)+1;
}第六步:双旋转
对于左右和右左这两种情况,单旋转不能使它达到一个平衡状态,要经过两次旋转。双旋转是针对于这两种情况的解决方案,同样的,这样两种情况也是对称的,只要解决了左右这种情况,右左就很好办了。图4是左右情况的解决方案,节点k3不满足平衡特性,因为它的左子树k1比右子树Z深2层,而且k1子树中,更深的一层的是k1的右子树k2子树,所以属于左右情况。
为使树恢复平衡,我们需要进行两步,第一步,把k1作为根,进行一次右右旋转,旋转之后就变成了左左情况,所以第二步再进行一次左左旋转,最后得到了一棵以k2为根的平衡二叉树树。
代码如下:
//左右情况的旋转
template<class T>
void AVLTree<T>::DoubleRotateLR(TreeNode<T>* &k3)
{
SingRotateRight(k3->lson);
SingRotateLeft(k3);
}
//右左情况的旋转
template<class T>
void AVLTree<T>::DoubleRotateRL(TreeNode<T>* &k3)
{
SingRotateLeft(k3->rson);
SingRotateRight(k3);
}第七步:插入
插入的方法和二叉查找树基本一样,区别是,插入完成后需要从插入的节点开始维护一个到根节点的路径,每经过一个节点都要维持树的平衡。维持树的平衡要根据高度差的特点选择不同的旋转算法。
代码如下:
//插入
template<class T>
void AVLTree<T>::insertpri(TreeNode<T>* &node,T x)
{
if(node==NULL)//如果节点为空,就在此节点处加入x信息
{
node=new TreeNode<T>();
node->data=x;
return;
}
if(node->data>x)//如果x小于节点的值,就继续在节点的左子树中插入x
{
insertpri(node->lson,x);
if(2==height(node->lson)-height(node->rson))
if(x<node->lson->data)
SingRotateLeft(node);
else
DoubleRotateLR(node);
}
else if(node->data<x)//如果x大于节点的值,就继续在节点的右子树中插入x
{
insertpri(node->rson,x);
if(2==height(node->rson)-height(node->lson))//如果高度之差为2的话就失去了平衡,需要旋转
if(x>node->rson->data)
SingRotateRight(node);
else
DoubleRotateRL(node);
}
else ++(node->freq);//如果相等,就把频率加1
node->hgt=Max(height(node->lson),height(node->rson));
}
//插入接口
template<class T>
void AVLTree<T>::insert(T x)
{
insertpri(root,x);
}第八步:查找
和二叉查找树相比,查找方法没有变法,不过根据存储的特性,AVL树能维持在一个O(logN)的稳定的时间,而二叉查找树则相当不稳定。
代码如下:
//查找
template<class T>
TreeNode<T>* AVLTree<T>::findpri(TreeNode<T>* node,T x)
{
if(node==NULL)//如果节点为空说明没找到,返回NULL
{
return NULL;
}
if(node->data>x)//如果x小于节点的值,就继续在节点的左子树中查找x
{
return findpri(node->lson,x);
}
else if(node->data<x)//如果x大于节点的值,就继续在节点的左子树中查找x
{
return findpri(node->rson,x);
}
else return node;//如果相等,就找到了此节点
}
//查找接口
template<class T>
TreeNode<T>* AVLTree<T>::find(T x)
{
return findpri(root,x);
}第九步:删除
删除的方法也和二叉查找树的一致,区别是,删除完成后,需要从删除节点的父亲开始向上维护树的平衡一直到根节点。
代码如下:
//删除
template<class T>
void AVLTree<T>::Deletepri(TreeNode<T>* &node,T x)
{
if(node==NULL) return ;//没有找到值是x的节点
if(x < node->data)
{
Deletepri(node->lson,x);//如果x小于节点的值,就继续在节点的左子树中删除x
if(2==height(node->rson)-height(node->lson))
if(node->rson->lson!=NULL&&(height(node->rson->lson)>height(node->rson->rson)) )
DoubleRotateRL(node);
else
SingRotateRight(node);
}
else if(x > node->data)
{
Deletepri(node->rson,x);//如果x大于节点的值,就继续在节点的右子树中删除x
if(2==height(node->lson)-height(node->rson))
if(node->lson->rson!=NULL&& (height(node->lson->rson)>height(node->lson->lson) ))
DoubleRotateLR(node);
else
SingRotateLeft(node);
}
else//如果相等,此节点就是要删除的节点
{
if(node->lson&&node->rson)//此节点有两个儿子
{
TreeNode<T>* temp=node->rson;//temp指向节点的右儿子
while(temp->lson!=NULL) temp=temp->lson;//找到右子树中值最小的节点
//把右子树中最小节点的值赋值给本节点
node->data=temp->data;
node->freq=temp->freq;
Deletepri(node->rson,temp->data);//删除右子树中最小值的节点
if(2==height(node->lson)-height(node->rson))
{
if(node->lson->rson!=NULL&& (height(node->lson->rson)>height(node->lson->lson) ))
DoubleRotateLR(node);
else
SingRotateLeft(node);
}
}
else//此节点有1个或0个儿子
{
TreeNode<T>* temp=node;
if(node->lson==NULL)//有右儿子或者没有儿子
node=node->rson;
else if(node->rson==NULL)//有左儿子
node=node->lson;
delete(temp);
temp=NULL;
}
}
if(node==NULL) return;
node->hgt=Max(height(node->lson),height(node->rson))+1;
return;
}
//删除接口
template<class T>
void AVLTree<T>::Delete(T x)
{
Deletepri(root,x);
}第十步:中序遍历
代码如下:
//中序遍历函数
template<class T>
void AVLTree<T>::insubtree(TreeNode<T>* node)
{
if(node==NULL) return;
insubtree(node->lson);//先遍历左子树
cout<<node->data<<" ";//输出根节点
insubtree(node->rson);//再遍历右子树
}
//中序遍历接口
template<class T>
void AVLTree<T>::traversal()
{
insubtree(root);
}第十一步:关于效率
此数据结构插入、查找和删除的时间复杂度均为O(logN),但是插入和删除需要额外的旋转算法需要的时间,有时旋转过多也会影响效率。
关于递归和非递归。我用的是递归的方法进行插入,查找和删除,而非递归的方法一般来说要比递归的方法快很多,但是我感觉非递归的方法写出来会比较困难,所以我还是选择了递归的方法。
还有一种效率的问题是关于高度信息的存储,由于我们需要的仅仅是高度的差,不需要知道这棵树的高度,所以只需要使用两个二进制位就可以表示这个差。这样可以避免平衡因子的重复计算,可以稍微的加快一些速度,不过代码也丧失了相对简明性和清晰度。如果采用递归写法的话,这种微加速就更显得微乎其微了。
如果有哪些不对的或者不清晰的地方请指出,我会修改并加以完善。
Reference:
http://blog.csdn.net/u013405574/article/details/51058133
http://blog.csdn.net/niteip/article/details/11840691/
http://blog.csdn.net/npy_lp/article/details/7426431
http://blog.csdn.net/zhaoyunfullmetal/article/details/47903319
https://songlee24.github.io/2015/01/13/binary-search-tree/
http://www.cnblogs.com/suimeng/p/4560056.html















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









