






CACC 协同式自适应巡航模型(仿真软件版本:Carsim2016,Matlab2018b及以上)
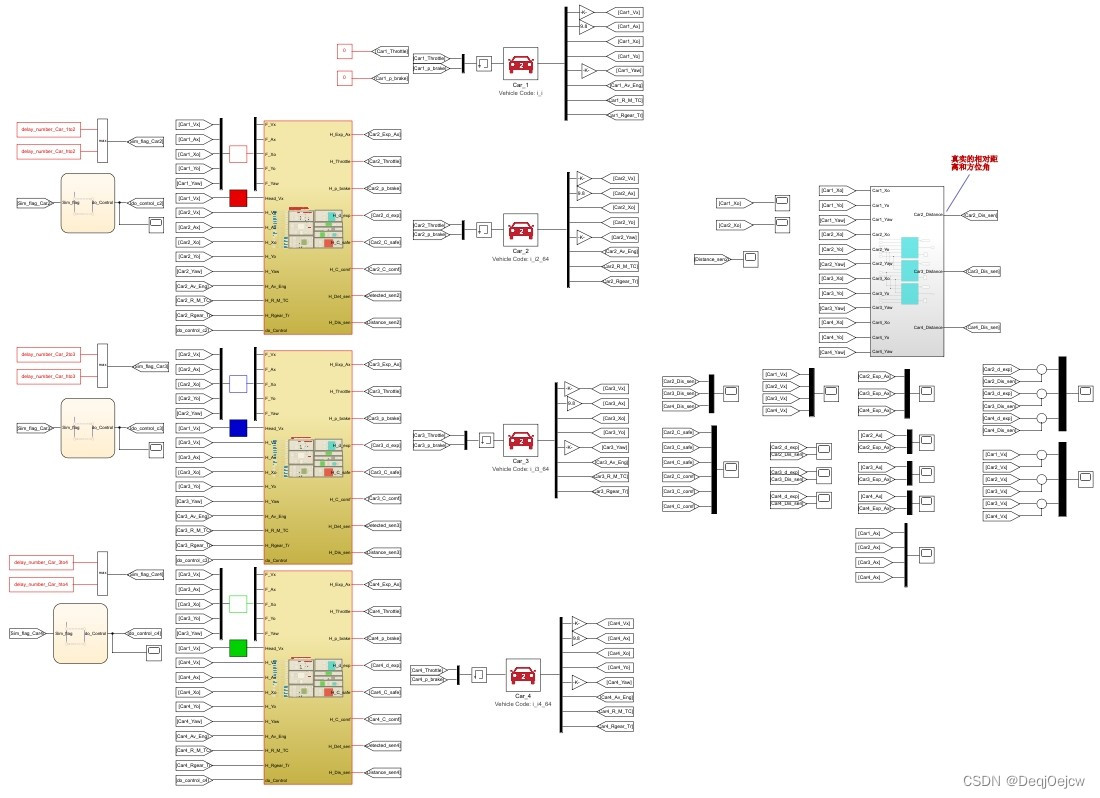
搭建四辆车在carsim和simulink进行协同式自适应巡航,其中间距策略考虑领航车速的影响,各个车辆采用分层式控制,分层式控制器主要分为下层控制(使用车辆逆纵向动力学模型(包括逆发动机模型 ))和上层控制(模糊MPC算法对相对距离,相对速度,加速度等进行调节,其中模糊逻辑对MPC的权重系数进行在线调整,stateflow进行模式切换),实现定速巡航和车队跟随工况。
附带详细学习资料,适合入门自适应巡航,协同式自适应巡航,自动驾驶纵向控制,同时学习模型预测控制算法和模糊推理方法。
CACC 协同式自适应巡航模型(仿真软件版本:Carsim2016,Matlab2018b及以上)
【引言】 随着自动驾驶技术的快速发展,协同式自适应巡航(Cooperative Adaptive Cruise Control, CACC)作为纵向控制的一种新兴技术,在车辆跟随和车队行驶等场景中展现了出色的性能。本文将介绍一种基于Carsim和Simulink的CACC模型搭建方法,其中间距策略考虑领航车速的影响,而各个车辆采用分层式控制。下面将从下层控制和上层控制两个方面详细介绍这一CACC模型的设计。
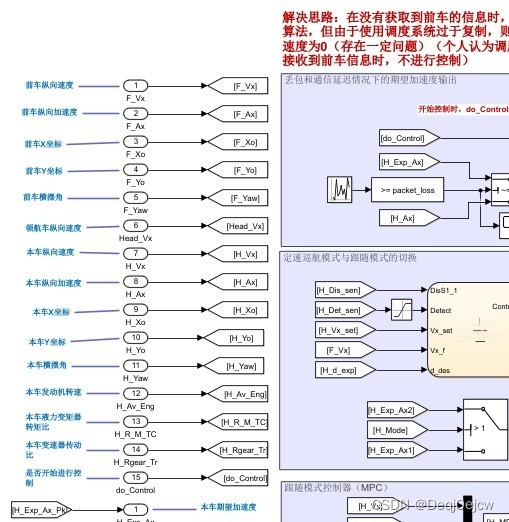
【下层控制】 下层控制是CACC模型中的基础,主要用于实现车辆的纵向动力学控制。在本模型中,我们采用了逆横向动力学模型,包括逆发动机模型等。通过逆横向动力学模型,我们可以根据车辆的当前状态和前车信息得到合适的加速度指令。这一模型的应用可以有效地解决车辆跟随过程中的速度控制问题,提高行车安全性。
【上层控制】 上层控制是CACC模型中的重要组成部分,主要用于调节车辆之间的相对距离、相对速度和加速度等参数。在本模型中,我们采用了模糊MPC算法进行上层控制。模糊MPC算法可以根据当前环境和车辆状态,对相对距离、相对速度和加速度等参数进行智能调节。同时,我们利用模糊逻辑对MPC的权重系数进行在线调整,以适应不同的行驶工况和道路条件。此外,我们还使用Stateflow进行模式切换,实现定速巡航和车队跟随等不同工况下的纵向控制。
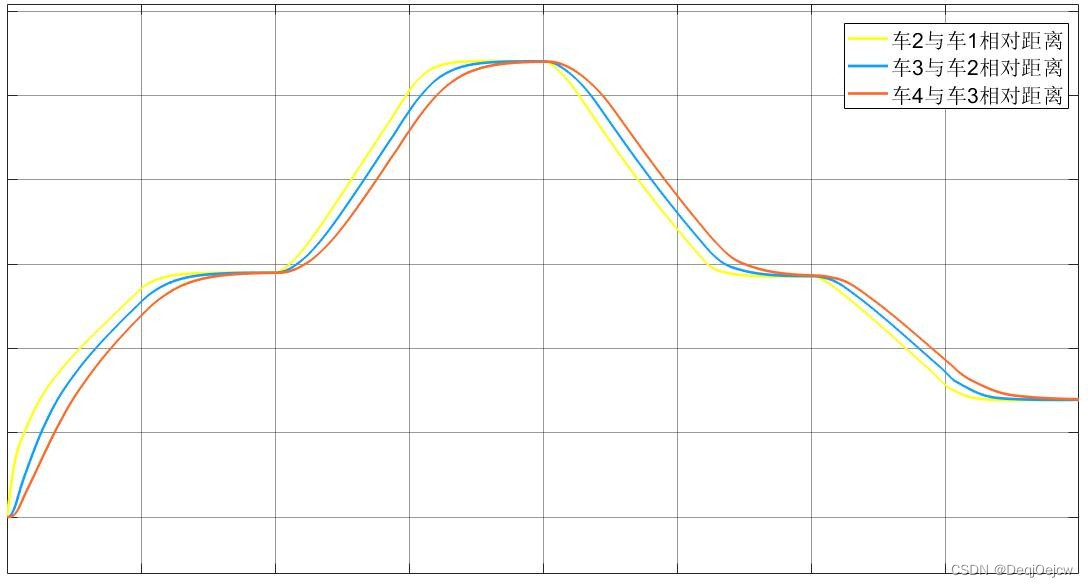
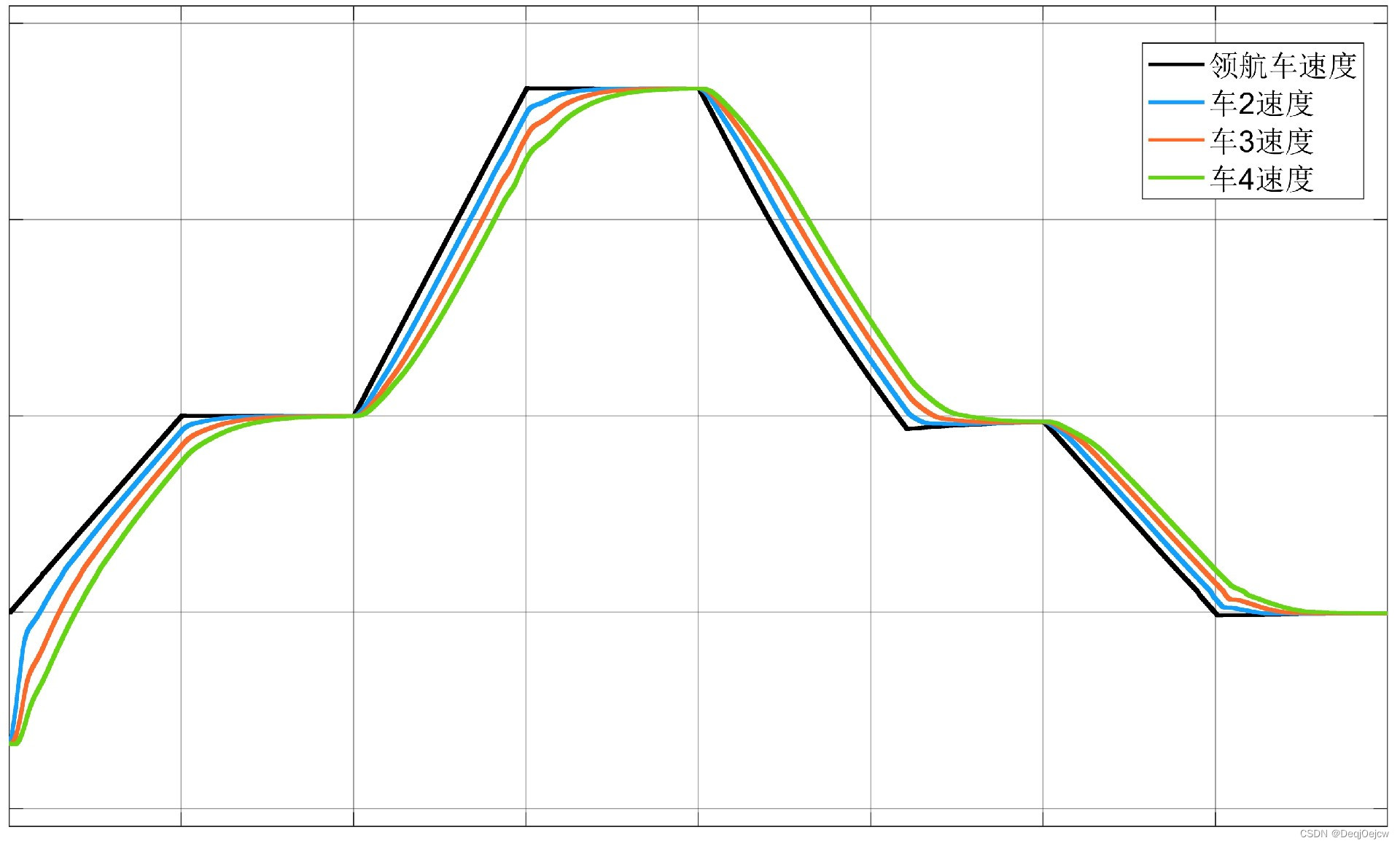
【仿真结果与分析】 通过对CACC模型进行大量仿真实验,我们得到了一系列有益的结果和分析。首先,我们验证了该模型在各种道路条件和车辆状态下的可用性。其次,我们对模型的控制效果进行了评估,发现该CACC模型在车辆跟随和车队行驶等情况下表现出色,能够有效降低车辆之间的间距和相对速度,提高行车安全性和舒适性。
【学习资料推荐】 除了介绍CACC模型的设计和仿真结果外,我们还准备了详细的学习资料,以帮助读者进一步学习自适应巡航、协同式自适应巡航和自动驾驶纵向控制等领域的知识。这些学习资料涵盖了模型预测控制算法和模糊推理方法的基本原理和应用案例,适合于初学者入门。通过学习这些资料,读者可以更深入地理解CACC模型的设计思路和相关技术的应用。
【结语】 本文介绍了一种基于Carsim和Simulink的CACC模型搭建方法,并详细阐述了其下层控制和上层控制的设计原理。通过大量的仿真实验,我们验证了该模型在车辆跟随和车队行驶等场景下的可行性和有效性。同时,我们还推荐了一些相关的学习资料,以帮助读者进一步深入学习相关技术。希望本文能为读者提供有益的信息和思路,促进自适应巡航和自动驾驶纵向控制领域的研究和应用。
相关代码,程序地址:http://lanzouw.top/688633031253.html















 690
690











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









