






车队控制纵向跟随—CarSim联合simulink仿真
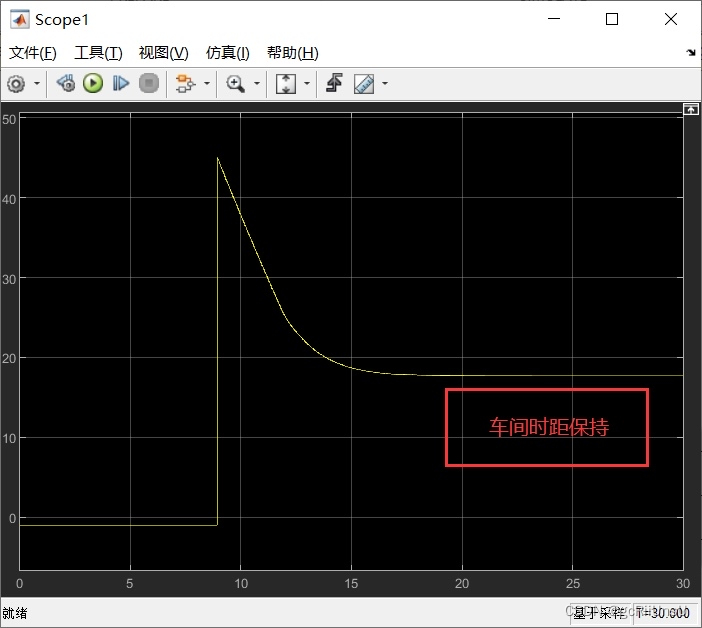
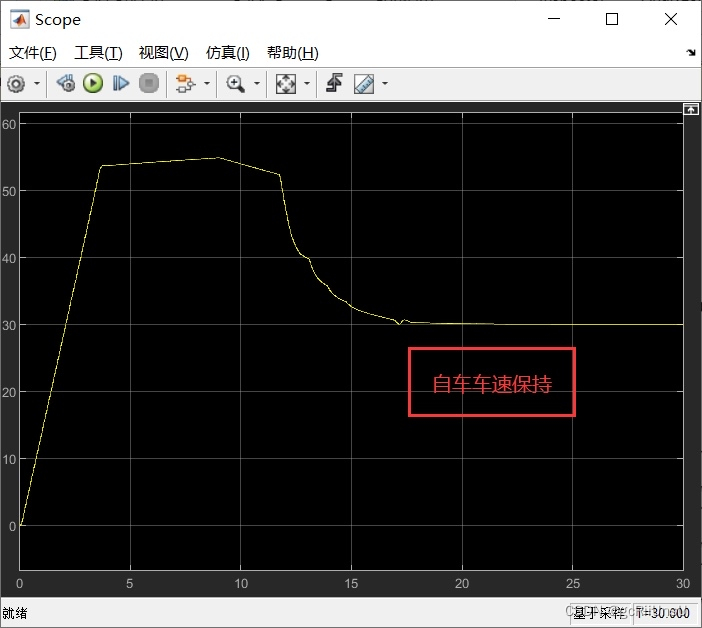
自车和前车保持车速一致,车间距保持不变
可调整纵向车速、车间距
可自主设置多车辆、多车道
资料内包含.cpar文件、.slx文件,以及cpar文件导入教程
Carsim2019版本,MATLAB需要R2018b及其以上版本
车队控制纵向跟随—CarSim联合Simulink仿真
在现代交通系统中,车队控制是一个重要的研究经验。它可以允许车辆在同一路段上进行自动驾驶,从而确保更加稳定的车辆间距和车速,从而保证交通系统的安全性和流畅性。在此背景下,本文介绍了车队控制中的纵向跟随系统,并利用Carsim和Simulink联合仿真的方法进行了探究。
纵向跟随是指实现车辆的自动化车间距控制系统,该系统通过具备先验知识的算法来控制汽车的纵向运动。本文基于Carsim模拟车辆的运动学和动力学特性,并利用Simulink设计车队控制系统。
在实际的车队管理中,车辆的控制需要考虑多方面因素,例如自车的速度、加速度、距离前车的距离等。针对这些因素,我们可以设定控制器来实现车辆的纵向跟随。在本文中,我们使用了Carsim模拟车队纵向跟随控制逻辑,并实现了多车辆多车道的自主设置。
对于车队纵向跟随系统,最基本的要求是实现车辆间的距离保持不变并且车速一致。因此,在本文中,我们设计了Carsim模拟器来模拟车队的行驶,并使用Simulink仿真来探究纵向跟随控制系统的有效性。
在Carsim和Simulink联合仿真中,我们使用了.cpar和.slx文件,并提供了cpar文件导入教程。在使用中,用户可以自由设置纵向车速和车间距,并且可以自主设置多车辆多车道。将这些要素完美地集成在一起,将可以使车队系统更加完善,从而提高整个交通系统的安全性和流畅性。
注意,为了实现本文中的仿真,Carsim2019版本和MATLAB R2018b及以上版本是必要的前提条件。同时,建议用户在使用本文中提供的仿真器时,按照导入教程进行操作,以保证仿真器的稳定性和可靠性。
在未来,车队控制的研究和应用将会越来越受到重视。本文介绍的Carsim和Simulink联合仿真技术为车队控制系统的研究提供了一种新的思路和方法。希望通过本文的介绍,可以为相关领域的学者和工程师提供一些参考和借鉴。
相关代码,程序地址:http://lanzouw.top/676051087144.html


















 36
36

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









