




摘要:自动驾驶车辆在复杂多车道交通环境中进行安全、平滑且可行的换道路径规划是实现智能驾驶的关键技术之一。针对道路中常见的多前车阻塞情形,本文提出构建一个涵盖不同场景复杂度的换道路径规划体系,以解决多车干扰下的换道可行性与轨迹连续性问题。
作者:Bob(原创)
项目概述
在多车道交通环境中实现安全、平滑且可行的换道路径规划是自动驾驶系统的核心难点之一。复杂道路中存在的多前车阻塞、车道密度变化以及障碍车辆的空间分布,使得传统单场景规划方法难以兼顾可达性、轨迹连续性与全局可行性。针对上述问题,亟需构建能够从简单到复杂、多层级扩展且具备泛化能力的换道路径规划框架,以适应高速公路和结构化道路中的多种驾驶情境。
为此,本文提出一个从单车道到多车道、从单障碍到多障碍、从栅格搜索到采样搜索的层级化换道路径规划框架。首先,在单车道单障碍情形下构建基于 A* 的离散栅格搜索模型,并采用三次贝塞尔曲线对由栅格生成的分段路径进行连续化与曲率平滑。随后,在相同配置下引入采样型 RRT* 方法,通过最优父节点选择与 rewiring 操作实现更短路径的构造,并系统性比较其与 A* 在可达性与路径质量上的差异。进一步地,将 RRT* 扩展至三车道多障碍场景,结合多矩形障碍物的碰撞检测与边级(edge-level)安全检查,构建能够适应复杂交通分布的多车道换道规划模型。
本文在固定道路结构及多障碍车辆纵向匀速运动条件下进行动画仿真与路径定量评估。结果显示:RRT* 在多车道、多障碍场景中能够生成更灵活、更短且障碍规避能力更强的路径,而 A* 在规则性较强、维度较低的场景下仍具有稳定的可达性与较高的计算效率。两类算法经由贝塞尔平滑后均能获得满足轨迹连续性与几何可行性的换道轨迹。上述研究形成了一个可扩展的多场景换道路径规划框架,为自动驾驶车辆的高速换道决策、局部路径规划以及高级驾驶辅助系统(ADAS)的设计提供了一种可行的通用建模与实现方式。
系统设计
系统设计采用从单车道到多车道、从单障碍到多障碍的分层路径规划结构,通过 A* 与 RRT* 的协同建模实现多场景换道轨迹的统一规划与平滑生成。
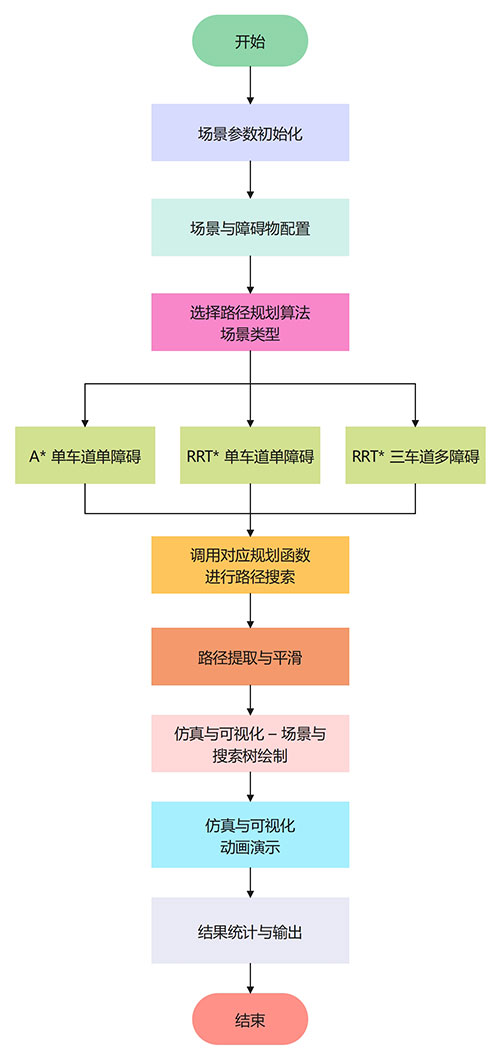
图1 系统整体流程图
硬件配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
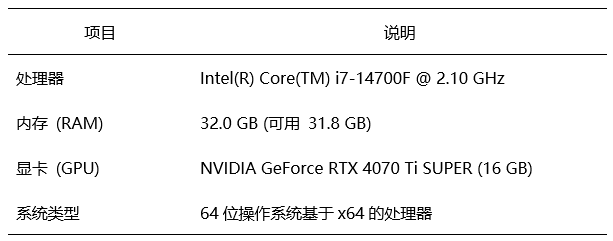
表1 惠普(HP)暗影精灵10台式整机配置(系统硬件配置)
软件环境
对本实验所需的各类软件及工具的基本信息进行了清晰汇总。

表2 系统软件配置(真实运行环境)
运行展示
运行demo_01_single_lane_astar_static_obstacle.m
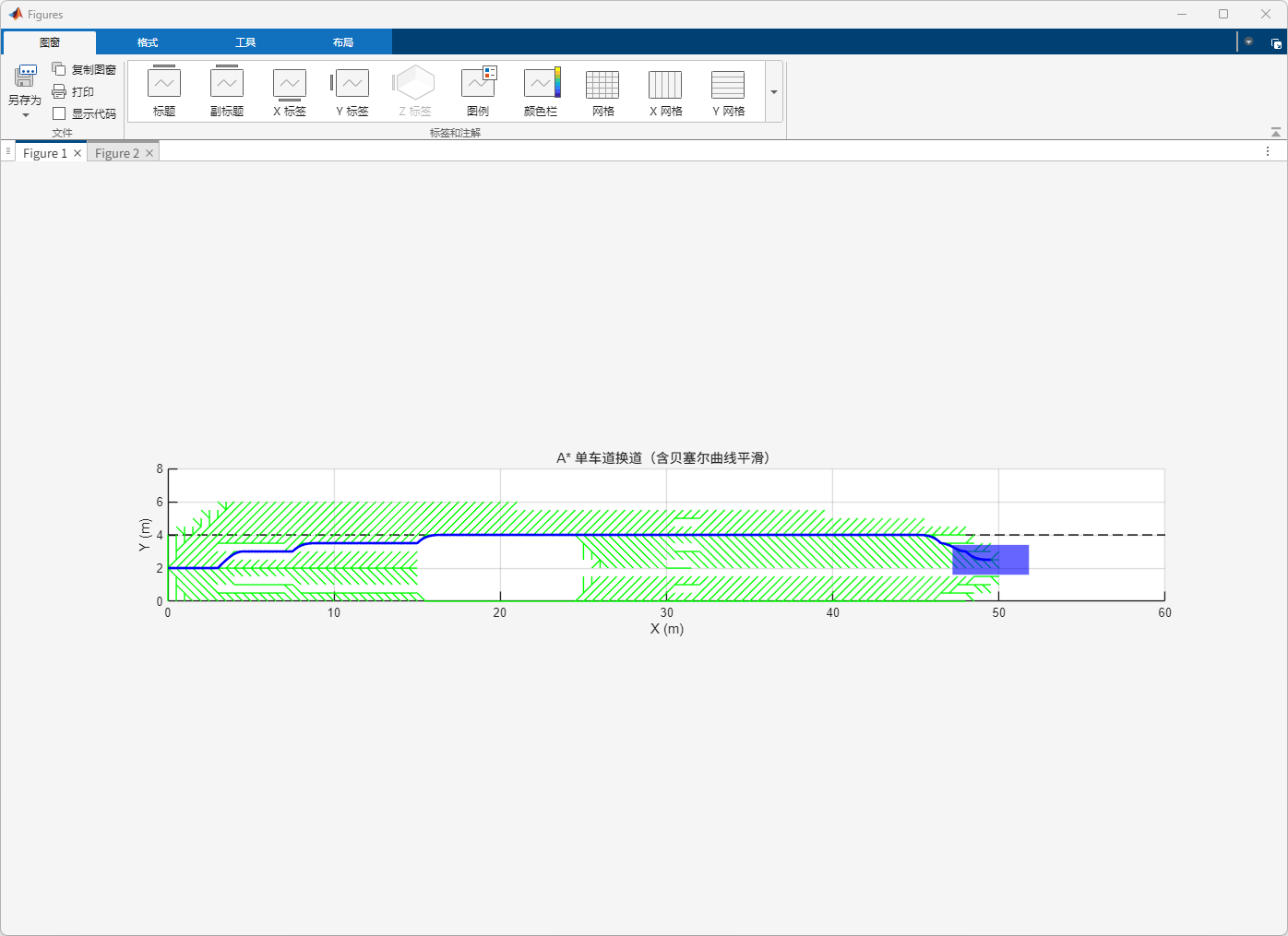
图2 A* 单车道换道路径规划示例(含搜索树与贝塞尔平滑)
该图展示了 A* 算法在单车道单障碍场景下的栅格搜索过程、搜索树拓展结构以及经贝塞尔曲线平滑后的可行换道轨迹。

图3 后车沿 A* 平滑路径的行驶轨迹曲线图
该图展示了基于贝塞尔曲线平滑的 A* 换道路径在纵向–横向平面上的轨迹形态,反映了车辆换道过程的横向位移变化。
![]()
图4 A* 路径规划计算结果(规划时间与路径长度)
图中文字给出了 A* 算法在该场景下的实际计算开销,包括总规划时间 0.18 s 和平滑后路径长度约 50.48 m。
运行demo_02_single_lane_rrtstar_static_obstacle.m
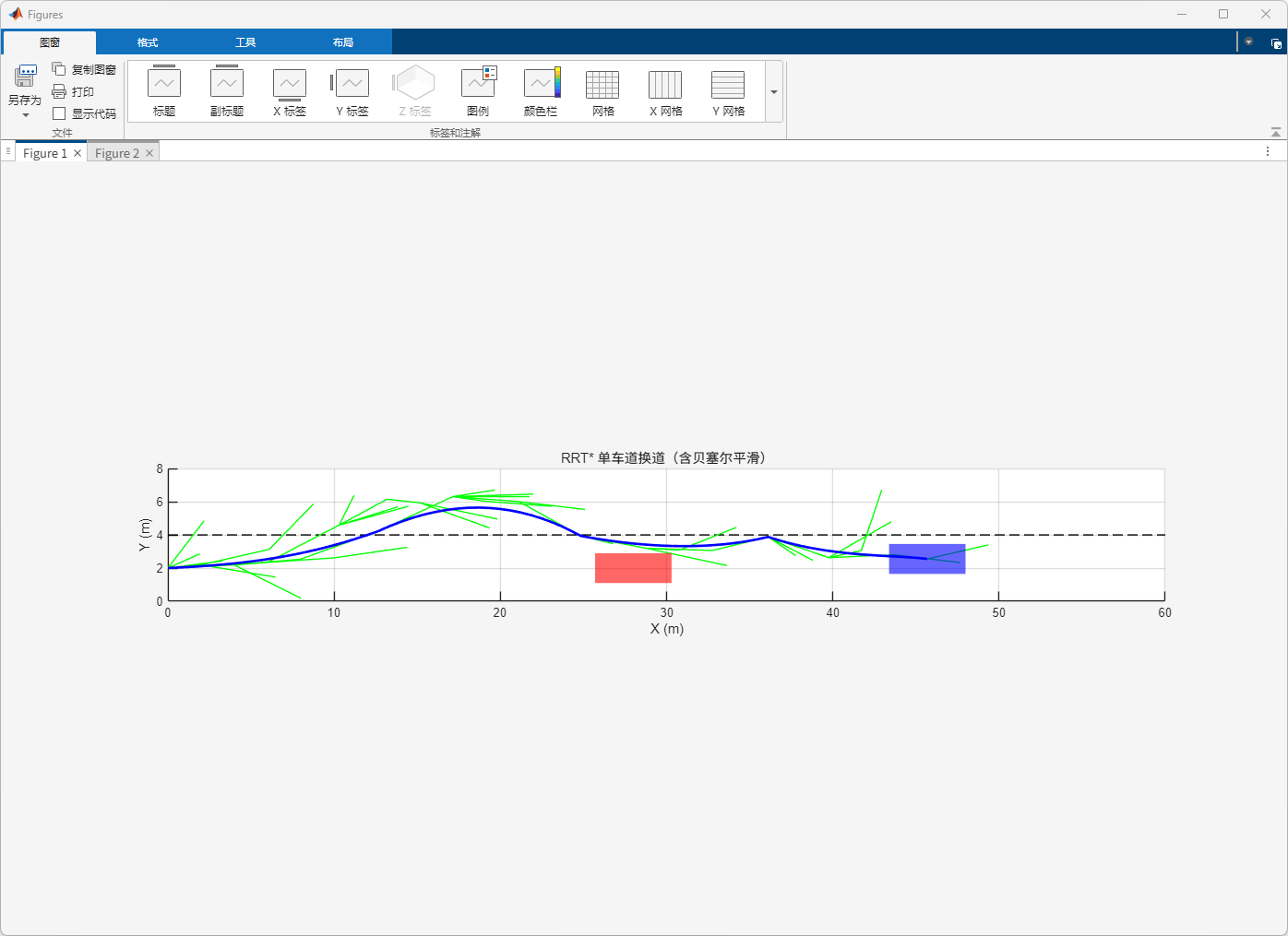
图5 RRT* 单车道换道路径规划示例(含搜索树与贝塞尔平滑)
该图展示了 RRT* 在单车道单障碍场景中的树结构扩展过程以及经贝塞尔曲线平滑后的换道轨迹。
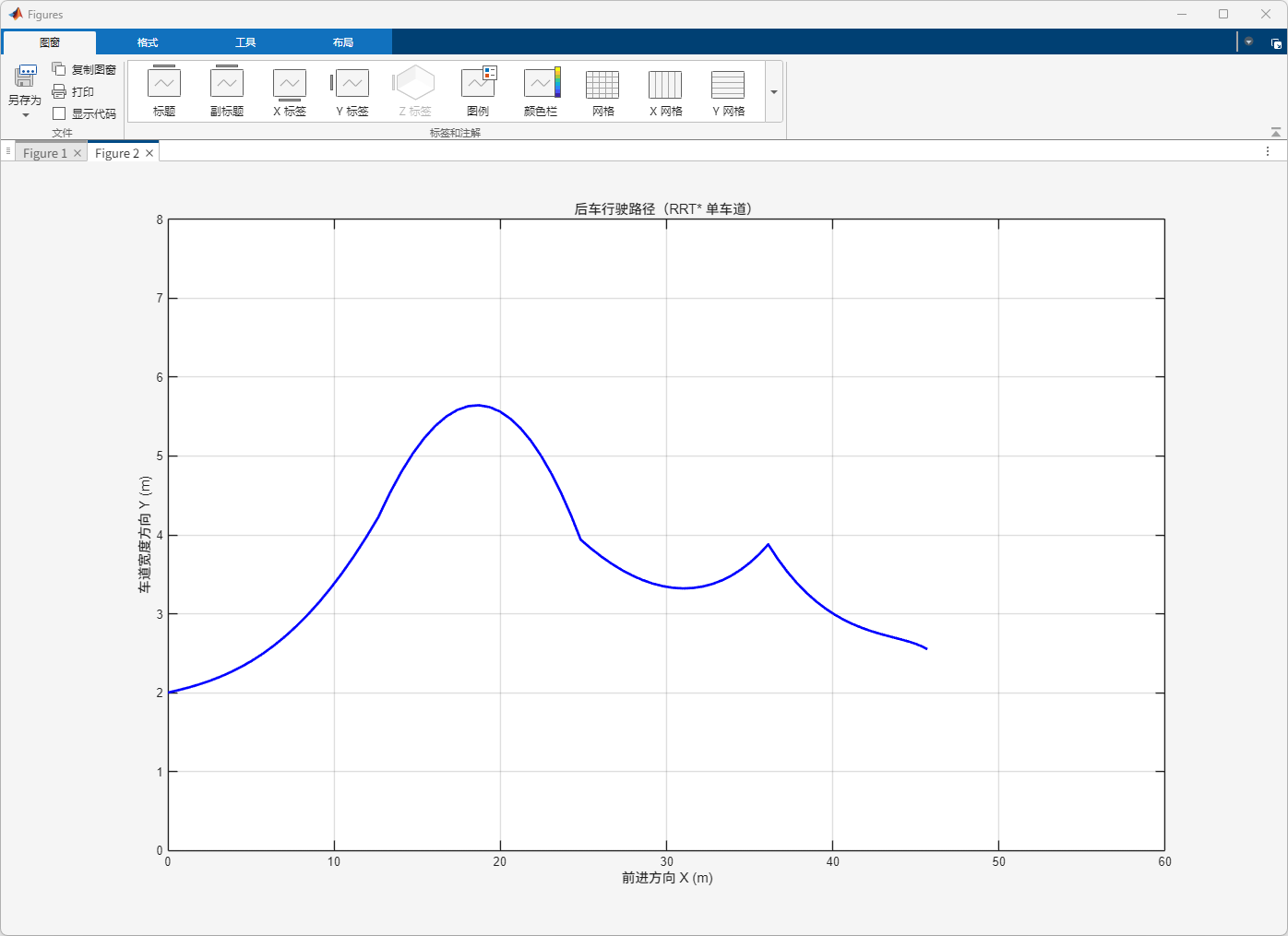
图6 后车沿 RRT* 平滑路径的行驶轨迹曲线
该图给出了基于 RRT* 平滑路径的纵向–横向轨迹曲线,反映了车辆在单障碍场景下的换道横向位移变化。
![]()
图7 RRT* 单车道路径规划计算结果(规划时间与路径长度)
该图记录了 RRT* 在单车道单障碍场景下的计算指标,包括规划时间 0.03 s 和平滑路径长度约 46.65 m。
运行demo_03_three_lanes_rrtstar_multi_obstacles.m
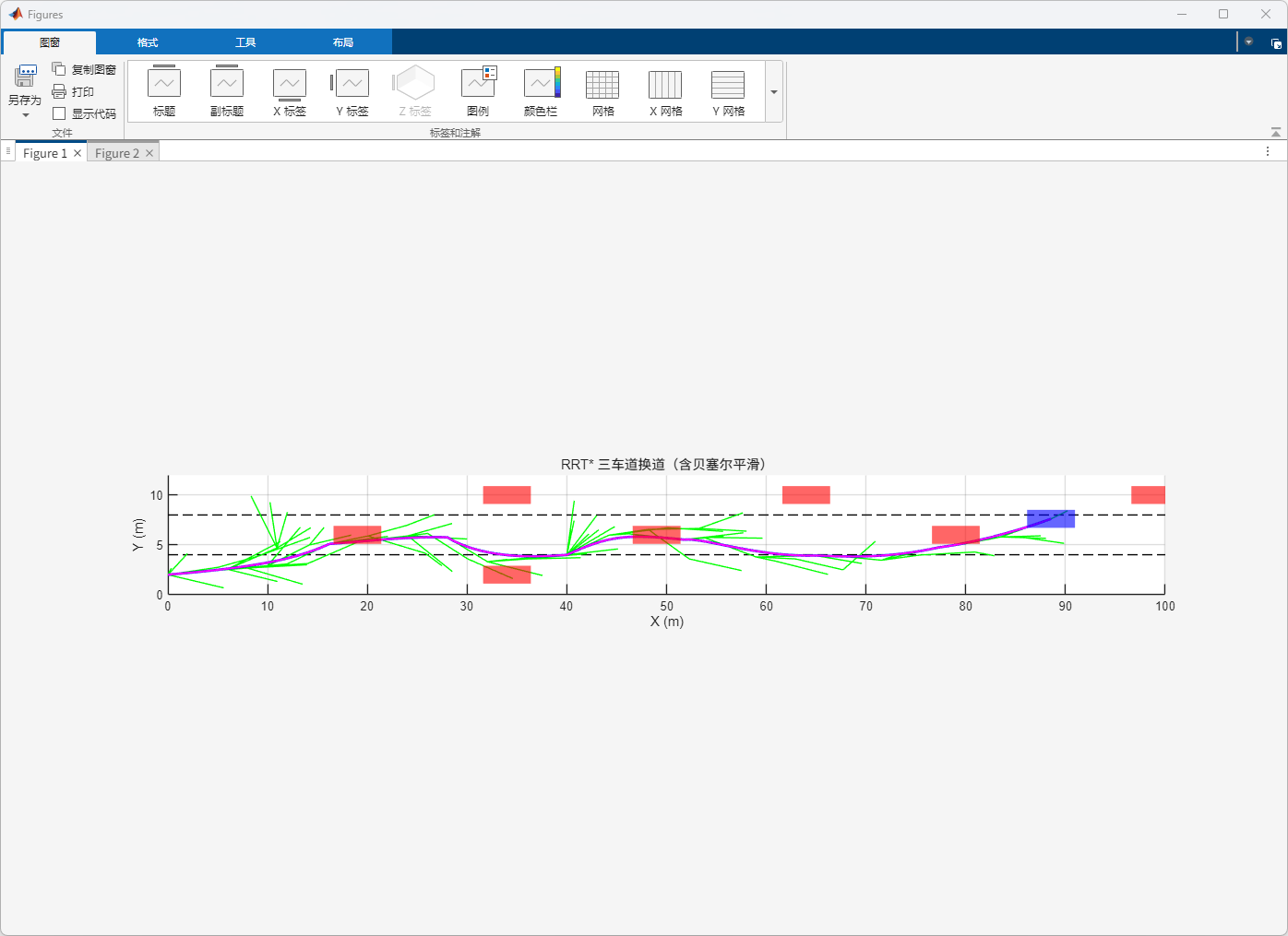
图8 RRT* 三车道多障碍换道路径规划示例(含搜索树与贝塞尔平滑)
该图展示了 RRT* 在三车道多障碍交通环境中的树结构扩展过程,以及经贝塞尔平滑后的多车道换道轨迹。
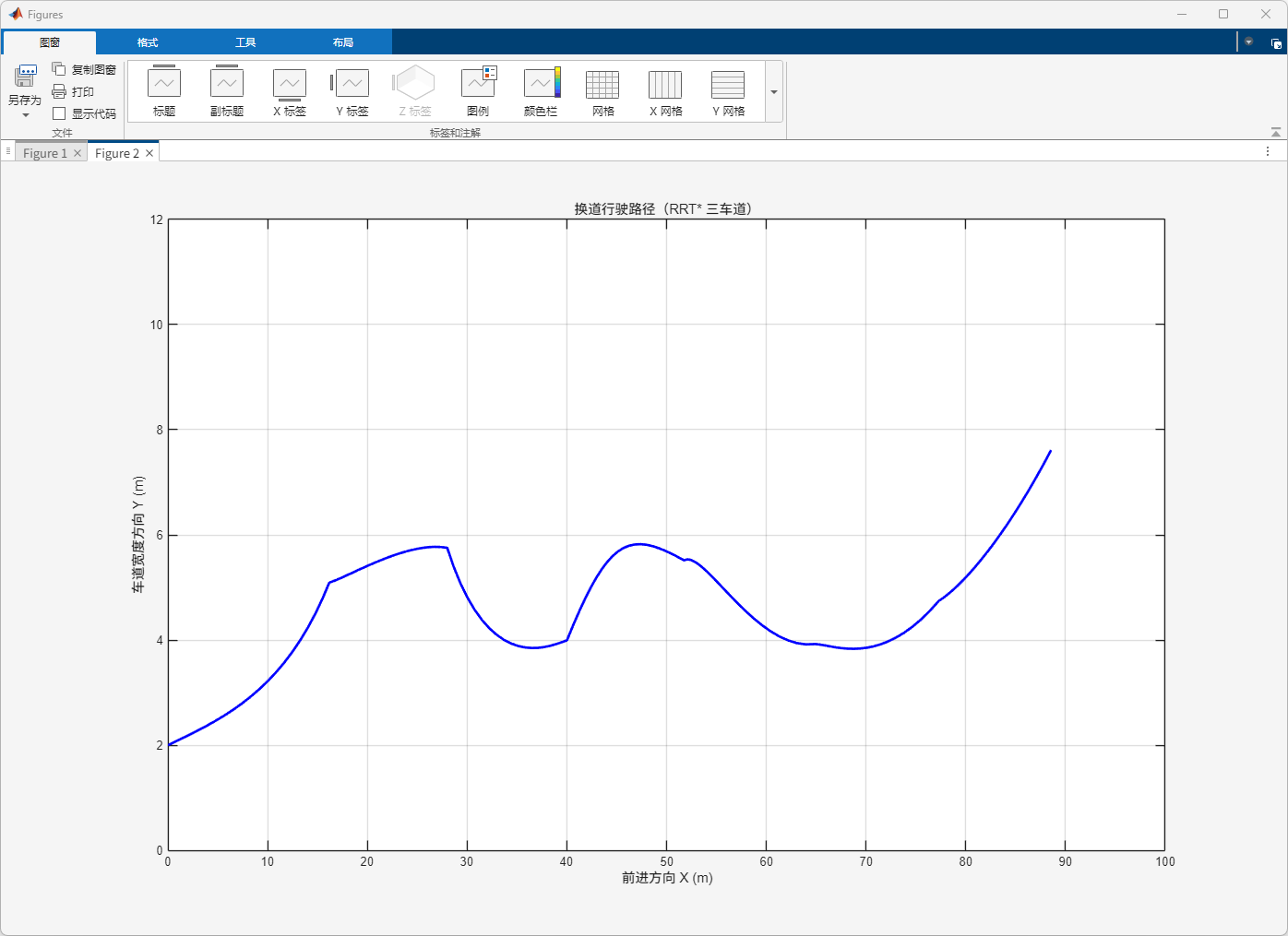
图9 后车沿 RRT* 平滑路径的换道行驶轨迹曲线(三车道场景)
该图给出了三车道多障碍场景下基于 RRT* 平滑路径生成的纵向–横向换道轨迹,体现车辆在复杂交通条件下的多段横向位移变化。
![]()
图10 RRT* 三车道路径规划结果(规划时间与路径长度)
该图列出了 RRT* 在三车道多障碍换道场景中的关键计算性能指标,包括规划时间 0.11 s 和平滑路径长度约 90.15 m。

















 1563
1563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









