






Sobel 实现C++ 备忘
#include "cv.h"
#include "highgui.h"
#include "math.h"
#include "stdio.h"
#include "malloc.h"
IplImage *image; //声明IplImage指针
int height, width;
CvScalar s;
int sobel_y[9] = { 1, 2, 1, 0, 0, 0, -1, -2, -1 }; //y方向sobel算子
int sobel_x[9] = { 1, 0, -1, 2, 0, -2, 1, 0, -1 }; //x方向sobel算子
void sobel()
{
int i, j, k;
int grayx = 0, grayy = 0, gray;
int *data;
int a[9];
data = (int *)malloc(height*width*sizeof(int));
for (i = 0; i<height; i++)
{
for (j = 0; j<width; j++)
{
s = cvGet2D(image, i, j);
gray = (int)s.val[0];
data[i*width + j] = gray;
}
}
for (i = 1; i<height - 1; i++)
{
for (j = 1; j<width - 1; j++)
{
grayx = 0;
grayy = 0;
s = cvGet2D(image, i, j);
a[0] = data[width*(i - 1) + j - 1];
a[1] = data[width*(i - 1) + j];
a[2] = data[width*(i - 1) + j + 1];
a[3] = data[width*i + j - 1];
a[4] = data[width*i + j];
a[5] = data[width*i + j + 1];
a[6] = data[width*(i + 1) + j - 1];
a[7] = data[width*(i + 1) + j];
a[8] = data[width*(i + 1) + j + 1];
for (k = 0; k<9; k++)
grayy += a[k] * sobel_y[k];
for (k = 0; k<9; k++)
grayx += a[k] * sobel_x[k];
s.val[0] = (abs(grayx) + abs(grayy));//此处需要取绝对值
cvSet2D(image, i, j, s);
}
}
free(data);
}
int main(int argc, char** argv)
{
image = cvLoadImage("image1.jpg", 0);
IplImage* image1 = cvLoadImage("image1.jpg", 1);
height = image->height;
width = image->width;
sobel();
cvNamedWindow("Image", 1);//创建窗口
cvNamedWindow("Sobel", 1);//创建窗口
cvShowImage("Image", image1);//显示图像
cvShowImage("Sobel", image);//显示图像
cvWaitKey(0); //等待按键
cvDestroyWindow("Image");//销毁窗口
cvReleaseImage(&image); //释放图像
return 0;
}
由方向校正Sobel系数 Mark
//生成核//根据向量方向,修改sobel算子
std::array<cv::Mat, 2> colorWish::genKernel( cv::Vec4f &axis, int kerRadius, float order,bool isRefine)
{
std::array<cv::Mat, 2> mKs;
cv::Mat mK1, mK2, A0, Ar, ArVis;
const double pi = 3.141592653;
//计算偏离角度-使用第一个方向//注意角度,一定限制在180度之内
double alpha = arccos(0, 0, axis[0], axis[1]);
alpha = alpha > pi ? 2 * pi - alpha : alpha;
//alpha = 0;
double alphaVis = arccos(0, 0, axis[2], axis[3]);
alphaVis = alphaVis > pi ? 2 * pi - alphaVis : alphaVis;
//测试-标准核-0角度
A0 = cv::Mat::zeros(kerRadius, kerRadius, CV_32FC1);
const float r = kerRadius / 2;//直接取整
const int c = r;
A0.at<float>(c, c) = 0;//只取第一象限,四象限根据对称规则来取
for (int i = 0; i < r; ++i) {
for (int j = 0; j < r; ++j) {
A0.at<float>(c + 1 + j, c + 1 + i) = (j + 1)*(c - i) / r;//使用线性核
}
}
//旋转//根据角度进行判断,不能使用一个公式//注意下标
Ar = cv::Mat::zeros(kerRadius, kerRadius, CV_32FC1);
ArVis = cv::Mat::zeros(kerRadius, kerRadius, CV_32FC1);
// 注意坐标旋转方向--象限的对应关系
double x, y;
for (int i = 0; i < kerRadius; ++i) {
y = i - c;
double d = sqrt(y *y + y*y);// *sqrt(2) / 2;//平方核
//d = abs(y) * 1;//线性核//修改距离判断,使符合线性叠加!
//d = r;//不修改线性,
for (int j = 0; j < kerRadius; ++j) {
x = j - c;
d = sqrt(x *x + y*y);//
d = pow(d, order);
//d*=sqrt(2) / 2;
double Beta = arccos(c, c, i, j);//已约束y值为正方向//需要修改顺序
double AReal = Beta + alpha;
double ARealVis = Beta + alphaVis;;// Beta - alphaVis;
//使用线性核//y= sin ,x = cos;
if (AReal > 0 && AReal < pi / 2){
Ar.at< float >(j, i) = (d*cos(AReal) + 0)*(r + 1 - d*sin(AReal)) / r;//同步修改公式
}
else {
if (AReal > pi / 2 && AReal < pi){
AReal = pi - AReal;
//std::cout << d*cos(AReal) << " "; std::cout << d*sin(AReal) << " ";
Ar.at< float >(j, i) = 0 - (d*cos(AReal) + 0)*(r + 1 - d*sin(AReal)) / r;// 注意坐标旋转方向--象限的对应关系
}else {
if (AReal > pi && AReal < 3 * pi / 2){
AReal = AReal - pi;
//std::cout << d*cos(AReal) << " "; std::cout << d*sin(AReal) << " ";
Ar.at< float >(j, i) = 0 - (d*cos(AReal) + 0)*(r + 1 - d*sin(AReal)) / r;
}else {
if (AReal > 2 * pi){
AReal = AReal - pi * 2;
//std::cout << d*cos(AReal) << " "; std::cout << d*sin(AReal) << " ";
Ar.at< float >(j, i) = (d*cos(AReal) + 0)*(r + 1 - d*sin(AReal)) / r;
}else {
AReal = pi * 2 - AReal;
//std::cout << d*cos(AReal) << " "; std::cout << d*sin(AReal) << " ";
Ar.at< float >(j, i) = (d*cos(AReal) + 0)*(r + 1 - d*sin(AReal)) / r;
}
}//if ( AReal > pi && AReal < 3*pi/2 )
}//if (AReal > pi / 2 && AReal < pi)
}//if (AReal > pi / 2 && AReal < pi )
//std::cout << Ar.at<float>(j, i) << " ";
if (ARealVis > 0 && ARealVis < pi / 2){
ArVis.at< float >(j, i) = d*cos(ARealVis)*(r + 1 - d*sin(ARealVis)) / r;
}else {
if (ARealVis > pi / 2 && ARealVis < pi){
ARealVis = pi - ARealVis;
ArVis.at< float >(j, i) = 0 - d*cos(ARealVis)*(r + 1 - d*sin(ARealVis)) / r;
}else {
if (ARealVis > pi && ARealVis < 3 * pi / 2){
ARealVis = ARealVis - pi;
ArVis.at< float >(j, i) = 0 - d*cos(ARealVis)*(r + 1 - d*sin(ARealVis)) / r;
}else {
if (ARealVis > 2 * pi)
{
ARealVis = ARealVis - pi * 2;
ArVis.at< float >(j, i) = d*cos(ARealVis)*(r + 1 - d*sin(ARealVis)) / r;//(3*pi/2,pi)
}
else {
ARealVis = pi * 2 - ARealVis;
ArVis.at< float >(j, i) = d*cos(ARealVis)*(r + 1 - d*sin(ARealVis)) / r;//(3*pi/2,pi)
}
}//if ( AReal > pi && AReal < 3*pi/2 )
}//if (AReal > pi / 2 && AReal < pi)
}//if (AReal > pi / 2 && AReal < pi )
//std::cout << Ar.at<float>(j, i) << " ";
}//for
}//for
Ar.at<float>(c, c) = 0;
ArVis.at<float>(c, c) = 0;
//转换坐标关系
cv::transpose(Ar, Ar);
cv::transpose(ArVis, ArVis);
for (int i = 0; i < kerRadius; ++i) {
std::cout << std::endl;
for (int j = 0; j < kerRadius; ++j) {
//std::swap(Ar.at<float>(j, i), Ar.at<float>(i, j));
std::cout << Ar.at<float>(j, i) << " ";
}
}
std::cout << std::endl;
for (int i = 0; i < kerRadius; ++i) {
std::cout << std::endl;
for (int j = 0; j < kerRadius; ++j) {
std::cout << ArVis.at<float>(j, i) << " ";
}
}
std::cout << std::endl;
mKs[0] = Ar.clone();
mKs[1] = ArVis.clone();
return mKs;
}//genKernel(cv::Vec4f &axis, int kerRadius)
拟合圆
最小二乘拟合圆曲线方程为:R²=(X-A)²+(Y-B)²
/// <summary>
/// 拟合圆
/// </summary>
private struct Circle
{
public double X;//圆心X
public double Y;//圆心Y
public double R;//半径R
}
/// <summary>
/// 定义的拟合点
/// </summary>
private struct PixelPoint
{
public double x;
public double y;
}
/// <summary>
/// 拟合圆程序
/// </summary>
/// <param name="pPointList">要拟合点集</param>
/// <returns>返回圆对象</returns>
private Circle FittingCircle(List<PixelPoint> pPointList)
{
Circle pCircle=new Circle();
if (pPointList.Count < 3)
{
XtraMessageBox.Show("最少需要三个点进行拟合");
return pCircle;
}
double X1 = 0;
double Y1 = 0;
double X2 = 0;
double Y2 = 0;
double X3 = 0;
double Y3 = 0;
double X1Y1 = 0;
double X1Y2 = 0;
double X2Y1 = 0;
for (int i = 0; i < pPointList.Count; i++)
{
X1 = X1 + pPointList[i].x;
Y1 = Y1 + pPointList[i].y;
X2 = X2 + pPointList[i].x * pPointList[i].x;
Y2 = Y2 + pPointList[i].y * pPointList[i].y;
X3 = X3 + pPointList[i].x * pPointList[i].x * pPointList[i].x;
Y3 = Y3 + pPointList[i].y * pPointList[i].y * pPointList[i].y;
X1Y1 = X1Y1 + pPointList[i].x * pPointList[i].y;
X1Y2 = X1Y2 + pPointList[i].x * pPointList[i].y * pPointList[i].y;
X2Y1 = X2Y1 + pPointList[i].x * pPointList[i].x * pPointList[i].y;
}
double C, D, E, G, H, N;
double a, b, c;
N = pPointList.Count;
C = N * X2 - X1 * X1;
D = N * X1Y1 - X1 * Y1;
E = N * X3 + N * X1Y2 - (X2 + Y2) * X1;
G = N * Y2 - Y1 * Y1;
H = N * X2Y1 + N * Y3 - (X2 + Y2) * Y1;
a = (H * D - E * G) / (C * G - D * D);
b = (H * C - E * D) / (D * D - G * C);
c = -(a * X1 + b * Y1 + X2 + Y2) / N;
pCircle.X = a / (-2);
pCircle.Y = b / (-2);
pCircle.R = Math.Sqrt(a * a + b * b - 4 * c) / 2;
return pCircle;
}
多个点拟合圆并给出圆心坐标
public static PointF FitCenter(List<PointF> pts, double epsilon = 0.1)
{
double totalX = 0, totalY = 0;
int setCount = 0;
for (int i = 0; i < pts.Count; i++)
{
for (int j = 1; j < pts.Count; j++)
{
for (int k = 2; k < pts.Count; k++)
{
double delta = (pts[k].X - pts[j].X) * (pts[j].Y - pts[i].Y) - (pts[j].X - pts[i].X) * (pts[k].Y - pts[j].Y);
if (Math.Abs(delta) > epsilon)
{
double ii = Math.Pow(pts[i].X, 2) + Math.Pow(pts[i].Y, 2);
double jj = Math.Pow(pts[j].X, 2) + Math.Pow(pts[j].Y, 2);
double kk = Math.Pow(pts[k].X, 2) + Math.Pow(pts[k].Y, 2);
double cx = ((pts[k].Y - pts[j].Y) * ii + (pts[i].Y - pts[k].Y) * jj + (pts[j].Y - pts[i].Y) * kk) / (2 * delta);
double cy = -((pts[k].X - pts[j].X) * ii + (pts[i].X - pts[k].X) * jj + (pts[j].X - pts[i].X) * kk) / (2 * delta);
totalX += cx;
totalY += cy;
setCount++;
}
}
}
}
if (setCount == 0)
{
//failed
return PointF.Empty;
}
return new PointF((float)totalX / setCount, (float)totalY / setCount);
}
.net core(c#)拟合圆测试
说明
很多时候,我们需要运动物体的转弯半径去描述其机器性能。但在大多数的现实条件下,我们只能够获取到运动物体的 GPS 位置点集,并不能直接得到转弯半径或者圆心位置。为此,我们可以利用拟合圆的方式得到圆坐标方程,由此得到转弯半径和圆心位置。
解决过程
关于拟合圆方程的方法有很多,曾经在这篇译文中获益良多代数逼近法、最小二乘法、正交距离回归法来拟合圆及其结果对比(Python)。此系列文中也给出了提及的三种方法的性能及效果对比,最终得出最优的解决方案就是最小二乘法。由于最近的学习中又进一步了解到,可以利用线性代数的方法去求解。本着大学课程中曾学过的《线性代数》知识,所以想着用此方法再加以解决该问题,以作最对比。
接下来,本文就最小二乘法和线性代数的方法求取圆方程作一论述。
准备
引用矩阵计算库MathNet.Numerics。该库是一个强大的科学计算库,遵循 .Net Standard,所以可以跨平台使用。
创建描述圆的类
public class Circle
{
/// <summary>
/// 圆心横坐标
/// </summary>
/// <value></value>
public double X { get; set; }
/// <summary>
/// 圆心纵坐标
/// </summary>
/// <value></value>
public double Y { get; set; }
/// <summary>
/// 圆半径
/// </summary>
/// <value></value>
public double R { get; set; }
}
画图,引用System.Drawing.Common库,以实现跨平台的图像生成。接下来,我们简单的实现一个图像帮助类来进行图像绘制
public class ImageHelp
{
private Image _image;
public ImageHelp(int width, int height)
{
_image = new Bitmap(width, height);
var graph = Graphics.FromImage(_image);
graph.Clear(Color.White);
}
public void DrawCicle(Circle circle, Brush brush)
{
var graph = Graphics.FromImage(_image);
var count=200;
var fitPoints = new Point[count+1];
var step = 2 * Math.PI / count;
for (int i = 0; i < count; i++)
{
//circle
var p = new Point();
p.X = (int)(circle.X + Math.Cos(i * step) * circle.R);
p.Y = (int)(circle.Y + Math.Sin(i * step) * circle.R);
fitPoints[i] = p;
}
fitPoints[count] = fitPoints[0];//闭合圆
graph.DrawLines(new Pen(brush, 2), fitPoints);
graph.Dispose();
}
public void DrawPoints(double[] X, double[] Y, Brush brush)
{
var graph = Graphics.FromImage(_image);
for (int i = 0; i < X.Length; i++)
{
graph.DrawEllipse(new Pen(brush, 2), (int)X[i], (int)Y[i], 6, 6);
}
graph.Dispose();
}
public void SaveImage(string file)
{
_image.Save(file, System.Drawing.Imaging.ImageFormat.Png);
}
}
模拟点集,由于现实中的数据采集存在着精度、数据记录等众多不确定因素的影像。模拟点集中也将加入一定程度的噪音。以下代码中 x 与 y 中存储着我们的点集数据:
var count = 50;
var step = 2 * Math.PI / 100;
var rd = new Random();
//参照圆
var x0 = 204.1;
var y0 = 213.1;
var r0 = 98.4;
//噪音绝对差
var diff = (int)(r0 * 0.1);
var x = new double[count];
var y = new double[count];
//输出点集
for (int i = 0; i < count; i++)
{
//circle
x[i] = x0 + Math.Cos(i * step) * r0;
y[i] = y0 + Math.Sin(i * step) * r0;
//noise
x[i] += Math.Cos(rd.Next() % 2 * Math.PI) * rd.Next(diff);
y[i] += Math.Cos(rd.Next() % 2 * Math.PI) * rd.Next(diff);
}
最小二乘法
网上有很多的原理解析,上文中提到的译文中也有提及,这里不在过多赘述。直接贴出 c#代码实现:
public Circle LeastSquaresFit(double[] X, double[] Y)
{
if (X.Length < 3)
{
return null;
}
double cent_x = 0.0,
cent_y = 0.0,
radius = 0.0;
double sum_x = 0.0f, sum_y = 0.0f;
double sum_x2 = 0.0f, sum_y2 = 0.0f;
double sum_x3 = 0.0f, sum_y3 = 0.0f;
double sum_xy = 0.0f, sum_x1y2 = 0.0f, sum_x2y1 = 0.0f;
int N = X.Length;
double x, y, x2, y2;
for (int i = 0; i < N; i++)
{
x = X[i];
y = Y[i];
x2 = x * x;
y2 = y * y;
sum_x += x;
sum_y += y;
sum_x2 += x2;
sum_y2 += y2;
sum_x3 += x2 * x;
sum_y3 += y2 * y;
sum_xy += x * y;
sum_x1y2 += x * y2;
sum_x2y1 += x2 * y;
}
double C, D, E, G, H;
double a, b, c;
C = N * sum_x2 - sum_x * sum_x;
D = N * sum_xy - sum_x * sum_y;
E = N * sum_x3 + N * sum_x1y2 - (sum_x2 + sum_y2) * sum_x;
G = N * sum_y2 - sum_y * sum_y;
H = N * sum_x2y1 + N * sum_y3 - (sum_x2 + sum_y2) * sum_y;
a = (H * D - E * G) / (C * G - D * D);
b = (H * C - E * D) / (D * D - G * C);
c = -(a * sum_x + b * sum_y + sum_x2 + sum_y2) / N;
cent_x = a / (-2);
cent_y = b / (-2);
radius = Math.Sqrt(a * a + b * b - 4 * c) / 2;
var result = new Circle();
result.X = cent_x;
result.Y = cent_y;
result.R = radius;
return result;
}
线性代数
从标准圆方程(x-c1)2+(y-c2)2=r2中进行方程变换得到2xc1+2yc2+(r2−c12−c22)=x2+y2,其中,我们c3替换常量值r2−c12−c22,即:r2−c12−c22=c3。由此,我们得到2xc1+2yc2+c3=x2+y2,将点集带入,方程就只剩三个未知数`c1,c2 和 c3。
简单起见,假设我们有四个点{[0,5],[0,-5],[5,0],[-5,0]},代入方程可得到四个方程:
0c1 + 10c2 + c3 = 25
0c1 - 10c2 + c3 = 25
10c1 + 0c2 + c3 = 25
-10c1 + 0c2 + c3 = 25
该方程组比较简单,一眼便能看出解。但用线性代数我们可以得到矩阵:
/*****************AB****C/
| 0c1 10c2 1c3| | 0 10 1| |c1| |25|
| 0c1 -10c2 1c3| = | 0 -10 1| * |c2| = |25|
| 10c1 0c2 1c3| | 10 0 1| |c3| |25|
|-10c1 0c2 1c3| |-10 0 1| |25|
在矩阵方程中AB=C,只需求出矩阵B即可得到方程组的解。c#中MathNet.Numerics可以轻松胜任这一工作:
public Circle LinearAlgebraFit(double[] X, double[] Y)
{
if (X.Length < 3)
{
return null;
}
var count = X.Length;
var a = new double[count, 3];
var c = new double[count, 1];
for (int i = 0; i < count; i++)
{
//matrix
a[i, 0] = 2 * X[i];
a[i, 1] = 2 * Y[i];
a[i, 2] = 1;
c[i, 0] = X[i] * X[i] + Y[i] * Y[i];
}
var A = DenseMatrix.OfArray(a);
var C = DenseMatrix.OfArray(c);
//A*B=C
var B = A.Solve(C);
double c1 = B.At(0, 0),
c2 = B.At(1, 0),
r = Math.Sqrt(B.At(2, 0) + c1 * c1 + c2 * c2);
var result = new Circle();
result.X = c1;
result.Y = c2;
result.R = r;
return result;
}
总结
Console.WriteLine($"raw c1:{x0}, c2:{y0}, r:{r0}");
var fit = new FitCircle();
var sth = new Stopwatch();
sth.Start();
var lsf = fit.LeastSquaresFit(x, y);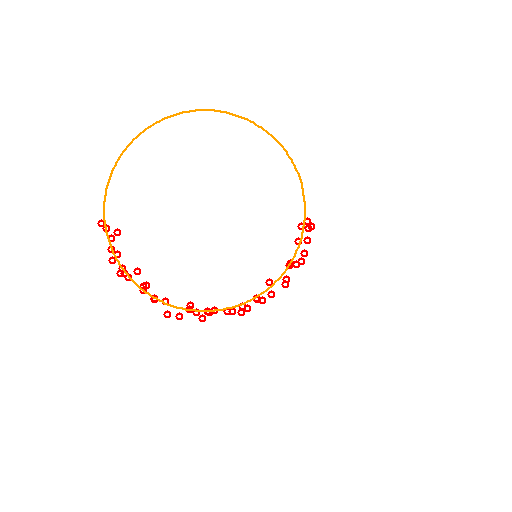
Console.WriteLine($"LeastSquaresFit c1:{lsf.X}, c2:{lsf.Y}, r:{lsf.R}, time:{sth.Elapsed}");
sth.Restart();
var laf = fit.LinearAlgebraFit(x, y);
Console.WriteLine($"LinearAlgebraFit c1:{laf.X}, c2:{laf.Y}, r:{laf.R}, time:{sth.Elapsed}");
var img = new ImageHelp(512, 512);
img.DrawPoints(x, y, Brushes.Red);
img.DrawCicle(lsf, Brushes.Green);
img.DrawCicle(laf, Brushes.Orange);
img.SaveImage("graph.jpeg");
控制台输出:
raw c1:204.1, c2:213.1, r:98.4
LeastSquaresFit c1:204.791071061878, c2:210.86075318831, r:100.436594821545, time:00:00:00.0011029
LinearAlgebraFit c1:204.791071061878, c2:210.860753188315, r:100.436594821541, time:00:00:00.1691119
从结果中可以看出,两种方法的结果基本一样,在小数点后好几位才出现差别。但是其计算效率却差异巨大,最小二乘法比线性代数快上 100 多倍。
在最小二乘法中,只有一个及其简单的 for 循环,很少涉及内存写。但在线性代数中,需要进行矩阵的生成DenseMatrix.OfArray,以及矩阵运算,这二者都需要内存写。再者,矩阵计算有着繁重的计算量,这些都在影响着线性代数拟合圆的效率。最终的胜利还是属于最小二乘法。
修改特定位置像素值
#include<opencv2\opencv.hpp>
int main()
{
cv::Mat img = cv::imread("Lena.jpg");
cv::Mat img_backup = img.clone();
//如果是单通道,转为三通道
if (1 == img.channels())
cv::cvtColor(img, img, cv::COLOR_GRAY2BGR);
/**
核心:
* *(img.data + img.step[0] * i + img.step[1] * j + img.elemSize1() * c)=new_val
* 这行代码是解析出来image的第i行第j列(即坐标为[j,i])第c通道,然后就可以对它进行赋值了。
*/
for (int i = 0; i < img.rows; ++i)
for (int j = 0; j < img.cols; ++j)
{
//对第0个通道进行赋值操作,也就是blue通道
*(img.data + img.step[0] * i + img.step[1] * j + img.elemSize1() * 0) = 255;
//对第2个通道进行赋值操作,也就是green通道
*(img.data + img.step[0] * i + img.step[1] * j + img.elemSize1() * 1) = 0;
//对第3个通道进行赋值操作,也就是red通道
*(img.data + img.step[0] * i + img.step[1] * j + img.elemSize1() * 2) = 0;
}
cv::imshow("img_src", img_backup);
cv::imshow("img_rst", img);
cv::waitKey();
}
OpencvSharp实现Mat定位设置值
//用C#中的get和set方法,速度较慢
for(int i = 1; i < rows -1; i++)
{
for(int j = 1; j < cols -1; j++)
{
v = (int)Math.Abs(k[0, 0] * src.Get<byte>(i - 1, j - 1) + k[0, 2] * src.Get<byte>(i - 1, j + 1) + k[0, 1] * src.Get<byte>(i - 1, j) + k[2, 1] * src.Get<byte>(i + 1, j));
v =(int)(255 - 2 * v + 2 * k[1, 1] * src.Get<byte>(i, j));
v = v > 0 ? v : 0;
v = v < 255 ? v : 255;
dst.Set(i, j, v);
}
}
OpencvSharp 像素与通道操作
一:API:
1: AT();获取像素值,4个重载,用法大同小异
public T At<T>(int i0, int i1) where T : struct; //返回指定数组元素的值。
public T At<T>(int i0) where T : struct;
public T At<T>(params int[] idx) where T : struct;
public T At<T>(int i0, int i1, int i2) where T : struct;
i0: Index along the dimension 0 (沿着空间维度0索引)
i1: Index along the dimension 1 (沿着空间维度1索引)
2: Get();与 AT方法一样
public T Get<T>(int i0, int i1) where T : struct;
public T Get<T>(int i0, int i1, int i2) where T : struct;
public T Get<T>(int i0) where T : struct;
public T Get<T>(params int[] idx) where T : struct;
3: Set();对指定位置的像素赋值 4个重载方法用法大同小异
//将值设置为指定的数组元素。
public void Set<T>(int i0, int i1, T value) where T : struct;
public void Set<T>(int i0, int i1, int i2, T value) where T : struct;
public void Set<T>(int[] idx, T value) where T : struct;
public void Set<T>(int i0, T value) where T : struct;
i0: Index along the dimension 0 (沿着空间维度0索引)
i1: Index along the dimension 1 (沿着空间维度1索引)
value: 像素值,泛型
二: 单通道图像像素处理
代码:
static void Main(string[] args)
{
string imagePath = @"d:\ZG190016\1.jpg";
ReadImageSingleChannelPixel(imagePath);
}
/// <summary>
/// 单通道像素操作
/// </summary>
public static void ReadImageSingleChannelPixel(string path)
{
using (Mat src = new Mat(path, ImreadModes.AnyColor | ImreadModes.AnyDepth))
using (Mat dst = new Mat())
{
//ColorConversionCodes 色彩空间转换枚举类型 BGRA2GRAY 转为灰度单通道
Cv2.CvtColor(src, dst, ColorConversionCodes.BGRA2GRAY);
Mat gray = new Mat();
dst.CopyTo(gray);
int height = dst.Rows; //行 获取图片的行叠加起来就是高度
int width = dst.Cols; //列 ... ... 宽度
for (int row = 0; row < height; row++)
{
for (int col = 0; col < width; col++)
{
byte p= dst.At<byte>(row, col); //获对应矩阵坐标的取像素
byte value =byte.Parse( (255-p).ToString()); //反转像素值
dst.Set(row, col, value); //赋值
}
}
using(new Window("gray",WindowMode.FreeRatio,gray)) //单通道图像
using(new Window("dst",WindowMode.FreeRatio,dst)) //反转后的单通道图像
using (new Window("src", WindowMode.FreeRatio, src)) //源图
{
Cv2.WaitKey(0);
}
}
}
二: 三通道图像像素处理
代码:
static void Main(string[] args)
{
string imagePath = @"d:\ZG190016\1.jpg";
ReadImageThreeChannelsPixel(imagePath);
}
/// <summary>
/// 三通道像素操作
/// </summary>
public static void ReadImageThreeChannelsPixel(string path)
{
using (Mat src = new Mat(path, ImreadModes.AnyColor | ImreadModes.AnyDepth))
using (Mat dst = new Mat(src.Size(), src.Type()))
{
int height = src.Rows;
int width = src.Cols;
int cn = src.Channels(); //获取通道数
#region 反转像素算法
for (int row = 0; row < height; row++)
{
for (int col = 0; col < width; col++)
{
if (cn == 1) //如果是单通道
{
byte p = dst.At<byte>(row, col); //获取像素
byte value = byte.Parse((255 - p).ToString()); //反转像素值
dst.Set(row, col, value); //赋值
}
else if(cn==3) //如果是三通道
{
//读取源图的像素
int b = src.At<Vec3b>(row, col)[0];
int g = src.At<Vec3b>(row, col)[1];
int r = src.At<Vec3b>(row, col)[2];
Vec3b color = new Vec3b
{
Item0 = (byte)(255 - b), //反转像素 (byte)( Math.Max(r, Math.Max(b, g)));
Item1 = (byte)(255 - g), // (byte)(Math.Max(r, Math.Max(b, g)));
Item2 = (byte)(255 - r) // (byte)(Math.Max(r, Math.Max(b, g)));
};
/*
Vec3b color = new Vec3b //反转像素
{
Item0 = (byte)Math.Abs(src.Get<Vec3b>(row, col).Item0 - 255),
Item1 = (byte)Math.Abs(src.Get<Vec3b>(row, col).Item1 - 255),
Item2 = (byte)Math.Abs(src.Get<Vec3b>(row, col).Item2 - 255)
};
*/
//Math.Max(r, Math.Max(b, g));取灰度,min也可以,但是亮度不同
//赋值
dst.Set<Vec3b>(row,col,color );
}
}
}
#endregion
using (new Window("dst", WindowMode.FreeRatio, dst)) //反转
using (new Window("src", WindowMode.FreeRatio, src)) //源图
{
Cv2.WaitKey(0);
}
}
}
Vec3b: 通道顺序 blue grenn red 在C++中对应uchar类型 ,C#对应byte类型:
像素数据结构 BGR 包含三个像素值 R代表红,red; G代表绿,green; B代表蓝,blue。RGB模式就是,色彩数据模式,R在高位,G在中间,B在低位。BGR正好相反。例如,如果色彩数据是24位,对于RGB模式,就是高8位是R,中间8位是G,低8位是B。一个色彩数据共24位,3个字节。
Vec3f:对应三通道的float类型。
把CV_8UC1 转换到 CV32F1实现:
src.convertTo(dst,CV_32F1);
反转像素API:
Cv2.BitwiseNot(src, dst); //反转像素函数,不需要操作像素,达到的效果一样
~ 取反符号:输出同样效果:
using (new Window("dst", WindowMode.FreeRatio, ~src)) //反转
using (new Window("src", WindowMode.FreeRatio, src)) //源图
{
Cv2.WaitKey(0);
}
OpenCV 基于距离变换的高精度轮廓匹配
轮廓匹配在定位测量应用中对其匹配的精度有更高的要求,通常的像素级的匹配结果难以满足其要求。本文给出了一种具有亚像素精度的快速轮廓匹配定位方法,其进行数学计算的基础为二值图像的距离变换。
二值图像距离变换的概念由Rosenfeld和Pfaltz于1966年其论文中提出,目前广泛应用于计算机图形学,计算机视觉及GIS空间分析等领域,其基本含义是计算一个图像中非零像素点到最近的零像素点的距离,也就是对每一各非零像素点计算其到零像素点的最短距离,并将该距离值赋值给该非零像素位置,从而将一幅二值图像变换为一幅距离图像。OpenCV通过cv::distanceTransform()函数,给出了该功能的快速实现方法。并通过参数的方式给出了距离的几种定义方式,如欧式距离、马氏距离、倒角距离等。
高精度轮廓匹配的算法实现步骤:
假设待匹配的两个轮廓分别为A和B
(1) 将轮廓A栅格化并生成为一幅二值图像Ia,其中轮廓点为255,背景点为0;
(2) 将二值图Ia进行距离变换得到距离图Id;
(3) 通过一个变换描述轮廓B和轮廓A之间的关系,如平移变换、刚体变换、仿射变换等;
(4) 通过一定的搜索策略或者最优化方法搜索轮廓B在距离图Id中的最佳变换参数,并输出。
在上述过程中(4)是最关键的一步,具体的搜索策略可考虑使用Powell搜索、分支定界搜索或者Gauss-Newton方法。下面给出了使用Gauss-Newton方法实现求解平移变换的代码,仅供参考。其它复杂的变换可参考此过程完成。
1 数据栅格化,并距离变换
int GetRasterDistanceImage(cv::Point2f* refPoints, int pntsNum, double resolution,
int& offX, int& offY, cv::Mat& rasterDistImg)
{
double maxX, minX, maxY, minY;
int i;
for (i = 0; i < pntsNum; ++ i)
{
maxX = refPoints[i].x;
minX = refPoints[i].x;
maxY = refPoints[i].y;
minY = refPoints[i].y;
break;
}
for ( ; i < pntsNum; ++ i)
{
if (refPoints[i].x > maxX)
maxX = refPoints[i].x;
if (refPoints[i].x < minX)
minX = refPoints[i].x;
if (refPoints[i].y > maxY)
maxY = refPoints[i].y;
if (refPoints[i].y < minY)
minY = refPoints[i].y;
}
int nX = int((maxX - minX) / resolution) + 200;
int nY = int((maxY - minY) / resolution) + 200;
cv::Mat rasterImg;
rasterImg.create(nY, nX, CV_8UC1);
memset(rasterImg.data, 0xFF, nY * nX);
double realCenterX = (maxX + minX) / 2.0f;
double realCenterY = (maxY + minY) / 2.0f;
int offsetX = nX / 2 - int(realCenterX / resolution + 0.5f);
int offsetY = nY / 2 - int(realCenterY / resolution + 0.5f);
uchar* dat = (uchar*)(rasterImg.data);
for (i = 0; i < pntsNum; ++ i)
{
if (validateMask[i] == 0)
continue;
int x = (int)floor(refPoints[i].x / resolution + 0.5f) + offsetX;
int y = nY - ((int)floor(refPoints[i].y / resolution + 0.5f) + offsetY);
*(dat + nX * y + x) = 0;
}
cv::distanceTransform(rasterImg, rasterDistImg, CV_DIST_C, 3);
offX = offsetX;
offY = offsetY;
return 1;
}
2 高精度轮廓匹配,并输出平移量 offX,offY
void MatchReferencePoints(cv::Mat& rasterDistImg, cv::Point2f* rasterPoints, int pointsNum , double& offX, double& offY)
{
offX = 0.0f;
offY = 0.0f;
cv::Mat imgB = rasterDistImg;
double* pL = new double[pointsNum];
double* pA = new double[pointsNum * 2];
double a_b[2] = {0};
double deltaX[2];
double AL[2];
double MM[4];
double va0, va1, va2, va3, va4;
double sx, sy;
double pError = 0.0f;
for (int i = 0; i < 100; ++ i)
{
double error = 0.0f;
for (int j = 0; j < pointsNum; ++ j)
{
sx = myPoints[j].x + a_b[0];
sy = myPoints[j].y + a_b[1];
va0 = GetDataValue(imgB, sx, sy);
va1 = GetDataValue(imgB, sx + 0.5, sy);
va2 = GetDataValue(imgB, sx - 0.5, sy);
va3 = GetDataValue(imgB, sx, sy + 0.5);
va4 = GetDataValue(imgB, sx, sy - 0.5);
pA[j] = va1 - va2;
pA[j + pointsNum] = va3 - va4;
pL[j] = 0.0f - va0;
error += pL[j] * pL[j];
}
if (i == 0)
pError = error;
else if (error > pError)
break;
pError = error;
int nOff_M = 0;
for(int j = 0; j < 2; ++ j){
for(int jj = 0; jj < 2; ++ jj){
MM[nOff_M + jj] = 0.0;
for(int kk = 0; kk < pointsNum; ++ kk)
MM[nOff_M + jj] += pA[j * pointsNum + kk] * pA[jj * pointsNum + kk];
} // M = A * A(T)
nOff_M += 2;
}
cv::Mat cvMatM(2, 2, CV_64FC1, MM);
cv::invert(cvMatM, cvMatM);
for (int j = 0; j < 2; ++ j)
{
AL[j] = 0.0f;
for (int kk = 0; kk < pointsNum; ++ kk)
AL[j] += pA[j * pointsNum + kk] * pL[kk];
}
for (int j = 0; j < 2; ++ j)
{
deltaX[j] = 0.0f;
for (int jj = 0; jj < 2; ++ jj)
deltaX[j] += MM[j * 2+ jj] * AL[jj];
}
int s = 0;
for (; s < 2; ++ s)
{
if (fabs(deltaX[s]) > 0.0001)
break;
}
if (s == 2)
break;
a_b[0] += deltaX[0];
a_b[1] += deltaX[1];
}
offX = a_b[0];
offY = a_b[1];
delete[] pL;
delete[] pA;
delete[] myPoints;
double temp = sqrt(pError / pointsNum);
}
















 1364
1364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









