






目录
前言
在我前面的文章里讲了如何用yolov8从0开始训练自己的模型,现在这篇文章将教大家如何在树莓派上部署yolov8的环境,以及如何实现高帧率的检测任务。

从上图可知,NCNN模型是最快的,我们可以看下官网是如何说的:
Out of all the model export formats supported by Ultralytics, NCNN delivers the best inference performance when working with Raspberry Pi devices because NCNN is highly optimized for mobile/ embedded platforms (such as ARM architecture). Therefor our recommendation is to use NCNN with Raspberry Pi.
NCNN在使用Raspberry Pi设备时提供了最佳的推理性能,因为NCNN针对移动/嵌入式平台(如ARM架构)进行了高度优化。
在树莓派上需要装的有:opencv-python,torch,torchvision,Ultralytics。opencv的安装非常简单,在本文中不出现安装教程。
在树莓派上安装Pytorch
以下操作均要根据自己对应的版本下载,切勿直接复制运行。
首先检查raspberry的Liunx架构,在终端输入:
uname -a
查看到我的raspberry的Liunx是armv7l,打开网址:Releases · KumaTea/pytorch-arm (github.com) https://github.com/KumaTea/pytorch-arm/releases然后找到对应架构以及对应Python版本的wheel文件,复制链接进行下载torch:
https://github.com/KumaTea/pytorch-arm/releases然后找到对应架构以及对应Python版本的wheel文件,复制链接进行下载torch:

pip3 install https://github.com/KumaTea/pytorch-arm/releases/download/v1.8.1/torch-1.8.1-cp39-cp39-linux_armv7l.whl
然后我们可以测试一下Pytorch是否以及装好了,如下:

为后面的计算机视觉任务做准备,我们还需要单独装一下torchvision,同上操作:

pip3 install https://github.com/KumaTea/pytorch-arm/releases/download/v1.8.1/torchvision-0.9.1-cp39-cp39-linux_armv7l.whl
出现Successfully installed就说明下载完成了。
在树莓派上安装Ultralytics环境
Raspberry Pi - Ultralytics YOLO DocsLearn how to deploy Ultralytics YOLOv8 on Raspberry Pi with our comprehensive guide. Get performance benchmarks, setup instructions, and best practices.https://docs.ultralytics.com/guides/raspberry-pi/我们参考官方文档,更新软件包列表,安装 pip 并升级到最新版本:
sudo apt update
sudo apt install python3-pip -y
pip install -U pip然后安装带有可选依赖项的Ultralytics:
pip3 install ultralytics然后就是等待一下漫长的下载过程~

在树莓派上初步测试模型
下载完成后我们简单的测试一下原先训练的best.pt模型,虽然检测的速度很慢,但是可以检测出来,说明我们前面的步骤都是正确无误的。
import cv2
from ultralytics import YOLO
from cv2 import getTickCount, getTickFrequency
# 加载 YOLOv8 模型
model = YOLO("best.pt") # 这里选择你训练的模型
# 获取摄像头内容,参数 0 表示使用默认的摄像头
cap = cv2.VideoCapture(0)
while cap.isOpened():
loop_start = getTickCount()
success, frame = cap.read() # 读取摄像头的一帧图像
if success:
results = model.predict(source=frame) # 对当前帧进行目标检测并显示结果
annotated_frame = results[0].plot()
# 中间放自己的显示程序
loop_time = getTickCount() - loop_start
total_time = loop_time / (getTickFrequency())
FPS = int(1 / total_time)
# 在图像左上角添加FPS文本
fps_text = f"FPS: {FPS:.2f}"
font = cv2.FONT_HERSHEY_SIMPLEX
font_scale = 1
font_thickness = 2
text_color = (0, 0, 255) # 红色
text_position = (10, 30) # 左上角位置
cv2.putText(annotated_frame, fps_text, text_position, font, font_scale, text_color, font_thickness)
cv2.imshow('img', annotated_frame)
# 通过按下 'q' 键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release() # 释放摄像头资源
cv2.destroyAllWindows() # 关闭OpenCV窗口

在树莓派上安装NCNN
打开终端输入pip指令下载NCNN库:
pip install ncnn -i https://pypi.tuna.tsinghua.edu.cn/simple
我用pip下载的时候出现了下述问题,如果没遇到的可以跳过。

可能的一种原因是pip版本太高了,我们尝试将pip降级到21.3.1版本:
pip install pip==21.3.1更多方法,参考下述博客:
如果问题依旧解决不了,直接看后文的ONNX模型。
用NCNN模型实现高帧率检测
将.pt模型转换成ncnn模型:
# Export a YOLOv8n PyTorch model to NCNN format
yolo export model=best.pt format=ncnn # creates 'best_ncnn_model'执行测试代码:
import cv2
from ultralytics import YOLO
from cv2 import getTickCount, getTickFrequency
# 加载 YOLOv8 模型
ncnn_model = YOLO("./best_ncnn_model")
# 获取摄像头内容,参数 0 表示使用默认的摄像头
cap = cv2.VideoCapture(0)
while cap.isOpened():
loop_start = getTickCount()
success, frame = cap.read() # 读取摄像头的一帧图像
if success:
results = ncnn_model.predict(source=frame) # 对当前帧进行目标检测并显示结果
annotated_frame = results[0].plot()
# 中间放自己的显示程序
loop_time = getTickCount() - loop_start
total_time = loop_time / (getTickFrequency())
FPS = int(1 / total_time)
# 在图像左上角添加FPS文本
fps_text = f"FPS: {FPS:.2f}"
font = cv2.FONT_HERSHEY_SIMPLEX
font_scale = 1
font_thickness = 2
text_color = (0, 0, 255) # 红色
text_position = (10, 30) # 左上角位置
cv2.putText(annotated_frame, fps_text, text_position, font, font_scale, text_color, font_thickness)
cv2.imshow('img', annotated_frame)
# 通过按下 'q' 键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release() # 释放摄像头资源
cv2.destroyAllWindows() # 关闭OpenCV窗口基本上在树莓派上是可以达到十几帧的,快来在你的树莓派部署看看吧!

在树莓派上使用ONNX模型
实测很多树莓派由于各种版本问题,目前是没办法用NCNN模型的。所以这里给出第二种方案,使用ONNX模型,运行速度依旧很快。
首先,我们要将best.pt模型转成best.onnx模型,我们采用INT8量化模型。
原文:INT8 quantization is an excellent way to compress the model and speed up inference, especially on edge devices. Here's how you can enable INT8 quantization:
INT8 量化是压缩模型和加快推理速度的绝佳方法,尤其是在边缘设备上。以下是启用 INT8 量化的方法:
yolo export model=best.pt format=onnx int8=True然后,打开上述网址,将onnxruntime的预编译库clone到本地:
onnxruntimehttps://github.com/nknytk/built-onnxruntime-for-raspberrypi-linux/tree/master
git clone https://github.com/nknytk/built-onnxruntime-for-raspberrypi-linux.git然后进入到你克隆的wheels文件下,输入(根据你对应的版本下载):
pip install install onnxruntime-1.9.1-cp39-none-linux_armv7l.whl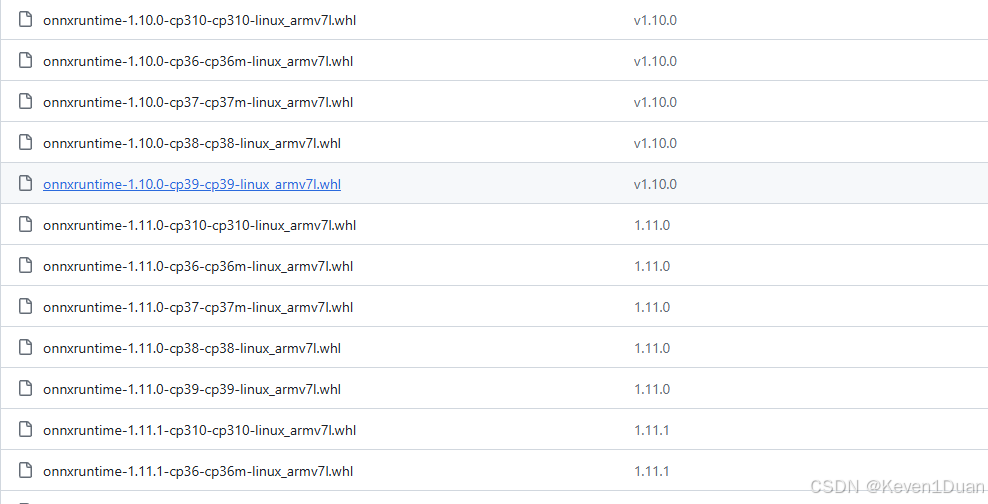
下载完成后执行下述代码测试ONNX模型:
import cv2
from ultralytics import YOLO
from cv2 import getTickCount, getTickFrequency
# 加载 YOLOv8 模型
model = YOLO("best.onnx")
# 获取摄像头内容,参数 0 表示使用默认的摄像头
cap = cv2.VideoCapture(0)
while cap.isOpened():
loop_start = getTickCount()
success, frame = cap.read() # 读取摄像头的一帧图像
if success:
results = model.predict(source=frame) # 对当前帧进行目标检测并显示结果
annotated_frame = results[0].plot()
# 中间放自己的显示程序
loop_time = getTickCount() - loop_start
total_time = loop_time / (getTickFrequency())
FPS = int(1 / total_time)
# 在图像左上角添加FPS文本
fps_text = f"FPS: {FPS:.2f}"
font = cv2.FONT_HERSHEY_SIMPLEX
font_scale = 1
font_thickness = 2
text_color = (0, 0, 255) # 红色
text_position = (10, 30) # 左上角位置
cv2.putText(annotated_frame, fps_text, text_position, font, font_scale, text_color, font_thickness)
cv2.imshow('img', annotated_frame)
# 通过按下 'q' 键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release() # 释放摄像头资源
cv2.destroyAllWindows() # 关闭OpenCV窗口运行后进行测试,是否达到你的预期效果呢?



















 3654
3654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











