






本文代码的实现严重依赖前面的两篇文章:
注本文的大部分文字提取于参考论文
重要说明:本文代码是学习小波变换时写的,文中的代码有较严重的性能问题(但是运算结果是正确的),如你需要本代码,需要自行优化或者更改(一维阈值去噪那篇文章中的性能挺快的)
一,小波阈值去噪基本理论
1,小波阈值处理
小波阈值收缩法是Donoho和Johnstone提出的,一下便是养活不少学者的三篇基础论文:
【1】 Donoho D L. De-noising by soft-thresholding. IEEE Trans- actions on Information Theory, 1995, 41(3): 613−627
【2】 Donoho D L, Johnstone I M. Adapting to unknown smooth- ness via wavelet shrinkage. Journal of the American Statistic
Association, 1995, 90(432): 1200−1224
【3】 Donoho D L, Johnstone I M, Kerkyacharian G, Picard D. Wavelet shrinkage: asymptopia? Journal of Royal Statisti-
cal Society Series B, 1995, 57(2): 301−369
小波阈值去噪其主要理论依据是,小波变换具有很强的去数据相关性,它能够使信号的能量在小波域集中在一些大的小波系数中;而噪声的能量却分布于整个小波域内.因此,经小波分解后,信号的小波系数幅值要大于噪声的系数幅值.可以认为,幅值比较大的小波系数一般以信号为主,而幅值比较小的系数在很大程度上是噪声.于是,采用阈值的办法可以把信号系数保留,而使大部分噪声系数减小至零.小波阈值收缩法去噪的具体处理过程为:将含噪信号在各尺度上进行小波分解,设定一个阈值,幅值低于该阈值的小波系数置为0,高于该阈值的小波系数或者完全保留,或者做相应的“收缩(shrinkage)”处理.最后将处理后获得的小波系数用逆小波变换进行重构,得到去噪后的图像.
2,阈值函数的选取
阈值去噪中,阈值函数体现了对超过和低于阈值的小波系数不同处理策略,是阈值去噪中关键的一步。设w表示小波系数,T为给定阈值,sign(*)为符号函数,常见的阈值函数有:
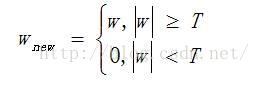
硬阈值函数: (小波系数的绝对值低于阈值的置零,高于的保留不变)
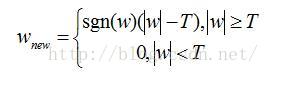
软阈值函数: (小波系数的绝对值低于阈值的置零,高于的系数shrinkage处理)
值得注意的是:
1) 硬阈值函数在阈值点是不连续的,在下图中已经用黑线标出。不连续会带来振铃,伪吉布斯效应等。
2) 软阈值函数,原系数和分解得到的小波系数总存在着恒定的偏差,这将影响重构的精度使得重构图像的边缘模糊等现象.
所以这里也添加一种简单的改进阈值函数,我们称之为半阈值
注意:图片中的公式有误,应该是sgn(w)*(|w|-P*T)(即将软函数中的阈值T缩小):

三种阈值处理策略见下图:

其实不少文章出现各种优秀的改进方案(于是有养活了不少学者,非本文重点):
3,阈值的确定
选取的阈值最好刚好大于噪声的最大水平,可以证明的是噪声的最大限度以非常高的概率低于
4,阈值策略
阈值策略有两种,一种是全局阈值策略,一种是分层阈值策略,从读论文了解到,全局阈值策略有他的缺陷:如果采用全局阈值进行处理,则会对所有尺度下的高频系数进行同一阈值处理,然而随着小波分解尺度的增加,有用信息分解后的小波系数将会越来越大,而噪声系数却会越来越小,所以为了防止高尺度下有用信息的分解系数被过度处理,分层阈值处理将会更合理。但是从我实际测试的结果来看------没什么区别!!!简便起见代码还是采用全局阈值。
为了不误导小伙伴们,请注意:这张图中阈值的估算不是来自CV1而是来自CD1,因为CD1是两次高通滤波的结果,里面含有最多的噪声,估计出来的噪声偏差也是最准确的。

5,小波阈值去噪过程
有用信号经小波变换后, 其能量将集中在少数的小波系数上, 而噪声点的小波系数互不相关, 分布在各个尺度的所有时间轴上. 保留小波变换的各尺度下的模极大值点, 而将其他点置零或最大程度的减小, 然后将处理后的小波系数做小波逆变换, 即可达到抑制噪声的目的.阈值去噪是通过对变换域系数与阈值进行比较判断, 然后将处理后的系数进行逆变换重构去噪图像. 小波阈值去噪法的具体步骤如下:
步骤 1. 图像的小波分解: 确定小波函数和分解层次 N, 对图像进行 N 层的小波分解;
步骤 2. 阈值处理: 对分解得到的各层系数选择阈值, 并对细节系数进行阈值判断;
步骤 3. 图像重构: 对阈值处理后的系数通过小波逆变换重建图像.
信号和噪声在小波域内具有不同的相关性. 信号在尺度间相应位置上的小波系数具有很强的相关性, 而噪声的小波系数则具有弱相关性或者不相关. 在阈值去噪中, 由于所选定的阈值通常固定, 不会随着小波系数的不同而变化, 这就不可避免地会对部分小波系数进行误判,于是又养活了一批学者。。。分析改进,分析改进,发文章!

1),小波的分解

2,小波的重构

二,Matlab库函数实现
1,核心库函数说明
1)wavedec2
图像的多级小波分解,将返回分解出来的小波系数以及小波系数的各级长度
2)waverec2
多级小波系数的重构,重构出原信号
3)wthresh函数
对系数进行指定类型(全局阈值或者分层阈值)的阈值去噪处理,软硬阈值处理函数。下图所示程序和运行结果可以比较清晰地看出该程序的执行过程。
clear;
y = linspace(-1,1,100);
thr = 0.4;
ythard = wthresh(y,'h',thr);
ytsoft = wthresh(y,'s',thr);
subplot(311);plot(y);
subplot(312);plot(ythard);
subplot(313);plot(ytsoft);
更具体的函数说明可以在,matlab里键入“doc 函数名”将得到很详细的说明,当然也可以百度
2,软,硬阈值处理效果:

哎哟,不错哦,半阈值去噪效果在视觉上的确有明显的改进效果

局部放大图像:
四幅图象均放大两倍,便于查看区别
这幅图像是源图像放大的效果:




3,完整的代码实现
% 获取输入参数
w = 'db3';%小波类型
n = 3;%分解层数
sorh1 = 'hard';%硬阈值
sorh2 = 'soft';%软阈值
sorh3 = 'half';%半阈值
% 对图像进行小波分解
[c,l] = wavedec2(octimage,n,w);
%求取阈值
N = numel(octimage);
[chd1,cvd1,cdd1] = detcoef2('all',c,l,1);
cdd1=cdd1(:)';
sigma = median(abs(cdd1))/0.6745;%提取细节系数求中值并除以0.6745
thr = sigma*sqrt(2*log(N))/sqrt(1+sqrt(n)); %对阈值做了改进
% 对小波系数全局阈值处理
cxchard = c;% 保留近似系数
cxcsoft = c;% 保留近似系数
cxchalf = c;% 保留近似系数
justdet = prod(l(1,:))+1:length(c);%截取细节系数(不处理近似系数)
% 阈值处理细节系数
cxchard(justdet) = myWthresh(cxchard(justdet),sorh1,thr);%硬阈值去噪
cxcsoft(justdet) = myWthresh(cxcsoft(justdet),sorh2,thr);%软阈值去噪
cxchalf(justdet) = myWthresh(cxchalf(justdet),sorh3,thr);%软阈值去噪
%小波重建
xchard = waverec2(cxchard,l,w);
xcsoft = waverec2(cxcsoft,l,w);
xchalf = waverec2(cxchalf,l,w);
figure(2);
imshow(uint8(xchard(1:iCount, :)));title('硬阈值去噪图像');
figure(3);
imshow(uint8(xcsoft(1:iCount, :)));title('软阈值去噪图像');
figure(4);
imshow(uint8(xchalf(1:iCount, :)));title('半阈值去噪图像');
三,C加加实现
说明:如同一维的阈值去噪一样,在执行自己编写的wavedec2函数时必须先初始化,初始化的目的是为了获取信号的长度,选择的是什么小波,以及分解的等级等信息,然后计算出未来的各种信息,比如每个等级的系数的size,其中共有变量m_msgCL2D记录了这些信息。二维小波分解的初始化函数如下:
//初始化二维图像的分解信息,保存未来需要的信息
bool CWavelet::InitDecInfo2D(
const int height,//预分解的图像的高度
const int width,//预分解的图像的宽度
const int Scale,//分解尺度
const int dbn//db滤波器编号,有默认值
)
{
if (dbn != 3)
SetFilter(dbn);
if (height < m_dbFilter.filterLen - 1 || width < m_dbFilter.filterLen - 1)
{
cerr << "错误信息:滤波器长度大于信号的高度或者宽度!" << endl;
return false;
}
int srcHeight = height;
int srcWidth = width;
m_msgCL2D.dbn = dbn;
m_msgCL2D.Scale = Scale;
m_msgCL2D.msgHeight.resize(Scale + 2);
m_msgCL2D.msgWidth.resize(Scale + 2);
//源图像的尺寸
m_msgCL2D.msgHeight[0] = height;
m_msgCL2D.msgWidth[0] = width;
//每一尺度上的尺寸
for (int i = 1; i <= Scale; i++)//注意:每个尺度的四个分量的长宽是一样的
{
int exHeight = (srcHeight + m_dbFilter.filterLen - 1) / 2;//对称拓延后系数的长度的一半
srcHeight = exHeight;
m_msgCL2D.msgHeight[i] = srcHeight;
int exWidth = (srcWidth + m_dbFilter.filterLen - 1) / 2;//对称拓延后系数的长度一半
srcWidth = exWidth;
m_msgCL2D.msgWidth[i] = srcWidth;
}
m_msgCL2D.msgHeight[Scale + 1] = srcHeight;
m_msgCL2D.msgWidth[Scale + 1] = srcWidth;
//计算总的数据个数
int tmpAllSize = 0;
int curPartSize = 0;
int prePartSize = 0;
for (int i = 1; i <= Scale; i++)
{
curPartSize = m_msgCL2D.msgHeight[i] * m_msgCL2D.msgWidth[i];
tmpAllSize += curPartSize * 4 - prePartSize;
prePartSize = curPartSize;
}
m_msgCL2D.allSize = tmpAllSize;
m_bInitFlag2D = true;
return true;
}
1,核心函数的实现
1)二维信号的单次分解
说明:本函数建立在一维的小波分解函数基础上(DWT)
// 二维数据的小波分解
void CWavelet::DWT2(
double *pSrcImage,//源图像数据(存储成一维数据,行优先存储)
int height,//图像的高
int width,//图像的宽
double *pDstCeof//分解出来的图像系数
)
{
if (!m_bInitFlag2D)
{
cerr << "错误信息:未初始化,无法对信号进行分解!" << endl;
return;
}
if (pSrcImage == NULL || pDstCeof == NULL)
{
cerr << "错误信息:dwt2数据无内存" << endl;
Sleep(3000);
exit(1);
}
int exwidth = (width + m_dbFilter.filterLen - 1) / 2 * 2;//pImagCeof的宽度
int exheight = (height + m_dbFilter.filterLen - 1) / 2 * 2;//pImagCeof的高度
double *tempImage = new double[exwidth*height];
// 对每一行进行行变换
double *tempAhang = new double[width];
double *tempExhang = new double[exwidth]; // 临时存放每一行的处理数据
for (int i = 0; i < height; i++)
{
for (int j = 0; j < width; j++)
tempAhang[j] = pSrcImage[i*width + j];//提取每一行的数据
DWT(tempAhang, width, tempExhang);
for (int j = 0; j < exwidth; j++)
tempImage[i*exwidth + j] = tempExhang[j];
}
// 对每一列进行列变换
double *tempAlie = new double[height]; // 临时存放每一列的转置数据
double *tempexlie = new double[exheight]; // 临时存放每一列的处理数据
for (int i = 0; i < exwidth; i++)
{
// 列转置
for (int j = 0; j < height; j++)
tempAlie[j] = tempImage[j*exwidth + i];//提取每一列数据
//执行变换
DWT(tempAlie, height, tempexlie);
// 反转置
for (int j = 0; j < exheight; j++)
pDstCeof[j*exwidth + i] = tempexlie[j];
}
AdjustData(pDstCeof, exheight, exwidth);//调整数据
delete[] tempAlie;
tempAlie = NULL;
delete[] tempexlie;
tempexlie = NULL;
delete[] tempAhang;
tempAhang = NULL;
delete[] tempExhang;
tempExhang = NULL;
delete[] tempImage;
tempImage = NULL;
}
2)二维信号的单次重构
说明:
//二维小波反变换
void CWavelet::IDWT2(
double *pSrcCeof, //二维源图像系数数据
int dstHeight,//重构出来后数据的高度
int dstWidth,//重构出来后数据的宽度
double *pDstImage//重构出来的图像
)
{
int srcHeight = (dstHeight + m_dbFilter.filterLen - 1) / 2 * 2;
int srcWidth = (dstWidth + m_dbFilter.filterLen - 1) / 2 * 2;//pSrcCeof的高度
IAdjustData(pSrcCeof, srcHeight, srcWidth);//调整成LL,HL,LH,HH
double *tempAline = new double[srcHeight]; // 临时存放每一列的数据
double *tempdstline = new double[dstHeight]; // 临时存放每一列的重构结果
double *pTmpImage = new double[srcWidth*dstHeight];
// 列重构
for (int i = 0; i < srcWidth; i++)//每一列
{
// 列转置
for (int j = 0; j<srcHeight; j++)
tempAline[j] = pSrcCeof[j*srcWidth + i];//提取每一列
IDWT(tempAline, dstHeight, tempdstline);
// 反转置
for (int j = 0; j < dstHeight; j++)
pTmpImage[j*srcWidth + i] = tempdstline[j];
}
// 对每一行进行行变换
double *tempAhang = new double[srcWidth];
double *tempdsthang = new double[dstWidth]; // 临时存放每一行的处理数据
for (int i = 0; i < dstHeight; i++)
{
for (int j = 0; j < srcWidth; j++)
tempAhang[j] = pTmpImage[i*srcWidth + j];//提取每一行的数据
IDWT(tempAhang, dstWidth, tempdsthang);
for (int j = 0; j < dstWidth; j++)
pDstImage[i*dstWidth + j] = tempdsthang[j];
}
delete[] tempAline;
tempAline = NULL;
delete[] tempdstline;
tempdstline = NULL;
delete[] tempAhang;
tempAhang = NULL;
delete[] tempdsthang;
tempdsthang = NULL;
delete[] pTmpImage;
pTmpImage = NULL;
}
3)二维信号的多级分解
说明:对于每一级分解都将调用单次二维分解函数来实现,所以本函数是建立在函数IDW2基础上
// 二维小波多级分解,需要先初始化获取未来数据信息
bool CWavelet::WaveDec2(
double *pSrcData,//源图像数据,存储为一维信号
double *pDstCeof//分解后的系数,它的大小必须是m_msgCL2D.allSize
)
{
if (!m_bInitFlag2D)
{
cerr << "错误信息:未初始化,无法对图像进行分解!" << endl;
return false;
}
if (pSrcData == NULL || pDstCeof == NULL)//错误:无内存
return false;
int height = m_msgCL2D.msgHeight[0];
int width = m_msgCL2D.msgWidth[0];
int scale = m_msgCL2D.Scale;
// 临时变量,图像数据
double *tempImage = new double[height*width];
int maxCoefSize =4 * m_msgCL2D.msgHeight[1] * m_msgCL2D.msgWidth[1];
double *tempDst = new double[maxCoefSize];
for (int i = 0; i < height*width; i++)
tempImage[i] = pSrcData[i];
int gap = m_msgCL2D.allSize - maxCoefSize;
for (int i = 1; i <= scale; i++)
{
DWT2(tempImage, height, width, tempDst);
// 低频子图像的高和宽
height = m_msgCL2D.msgHeight[i];
width = m_msgCL2D.msgWidth[i];
for (int j = 0; j < height*width; j++)
tempImage[j] = tempDst[j];//提取低频系数(近似系数)
//
for (int j = 0, k = gap; j < 4 * height*width; j++, k++)
pDstCeof[k] = tempDst[j];//所有系数
gap -= 4 * m_msgCL2D.msgWidth[i + 1] * m_msgCL2D.msgHeight[i + 1] - height*width;
}
delete[] tempDst;
tempDst = NULL;
delete[] tempImage;
tempImage = NULL;
return true;
}4)多级分解系数的重构
// 根据多级分解系数重构出二维信号,必须先初始化获取分解信息
bool CWavelet::WaveRec2(
double *pSrcCoef,//多级分解出的源系数
double *pDstData//重构出来的信号
)
{
if (!m_bInitFlag2D)
{
cerr << "错误信息:未初始化,无法对信号进行分解!" << endl;
return false;
}
if (pSrcCoef == NULL || pDstData == NULL)//错误:无内存
return false;
int height = m_msgCL2D.msgHeight[0];
int width = m_msgCL2D.msgWidth[0];
int decLevel = m_msgCL2D.Scale;
int maxCeofSize = 4 * m_msgCL2D.msgHeight[1] * m_msgCL2D.msgWidth[1];
double *pTmpImage = new double[maxCeofSize];
int minCeofSize = 4 * m_msgCL2D.msgHeight[decLevel] * m_msgCL2D.msgWidth[decLevel];
for (int i = 0; i < minCeofSize; i++)
pTmpImage[i] = pSrcCoef[i];
int gap = minCeofSize;
for (int i = decLevel; i >= 1; i--)
{
int nextheight = m_msgCL2D.msgHeight[i - 1];//重构出来的高度
int nextwidth = m_msgCL2D.msgWidth[i - 1];//重构出来的宽度
IDWT2(pTmpImage, nextheight, nextwidth, pDstData);
if (i > 1)//i==1已经重构出来了,不再需要提取系数
{
for (int j = 0; j < nextheight*nextwidth; j++)
pTmpImage[j] = pDstData[j];
for (int j = 0; j < 3 * nextheight*nextwidth; j++)
pTmpImage[nextheight*nextwidth + j] = pSrcCoef[gap + j];
gap += 3 * nextheight*nextwidth;
}
}
delete[] pTmpImage;
pTmpImage = NULL;
return true;
}2,函数正确性验证
1),二维单次分解与重构测试

2)二维多级分解与重构测试
说明:对二维数据进行了5层分解,选取的是小波族db3

3,阈值去噪结果:
说明:本测试只是模拟测试,对图像的处理也是一样的(完全一致)
硬阈值去噪结果

软阈值去噪结果

实际的VC++图像处理结果为:
源噪声图像为:

注意以下是采用:db6,3层分解,软阈值去噪,阈值是在前文提及的阈值基础上缩小2.5倍得到的效果:

注意以下是采用:db6,3层分解,硬阈值去噪,阈值是在前文提及的阈值基础上缩小2.5倍得到的效果:

附带上述matlab验证程序
clc;
clear all;
close all;
% %%%%%%%%%%%%%%%%%%%%%%%%通过matlab的函数来实现阈值去噪%%%%%%%%%%%%%%%%%%%%%%%%%% %
X=[ 10, 12, 30, 4, 5, 61, 2, 3;
41, 5, 6, 27, 3, 4, 15, 6;
72, 8, 41, 5, 6, 7, 8, 9;
5, 64, 7, 8, 9, 14, 6, 27;
8, 9, 40, 31,10, 12, 30, 4;
50, 61, 2, 3, 41, 5, 6, 27];
X=double(X);
% 获取输入参数
wname = 'db3';%小波类型
n = 3;%分解层数
sorh1 = 'h';%硬阈值
sorh2 = 's';%软阈值
% 对图像进行小波分解
[c,l] = wavedec2(X,n,wname);
%求取阈值
N = numel(X);
[chd1,cvd1,cdd1] = detcoef2('all',c,l,1);
cvd1=cvd1(:)';
sigma = median(abs(cvd1))/0.6745;%提取细节系数求中值并除以0.6745
thr = sigma*sqrt(2*log(N));
% 对小波系数全局阈值处理
cxch = c;% 保留近似系数
cxcs = c;% 保留近似系数
justdet = prod(l(1,:))+1:length(c);%截取细节系数(不处理近似系数)
% 阈值处理细节系数
cxch(justdet) = wthresh(cxch(justdet),sorh1,thr);%硬阈值去噪
cxcs(justdet) = wthresh(cxcs(justdet),sorh2,thr);%软阈值去噪
%小波重建
xch = waverec2(cxch,l,wname);
xcs = waverec2(cxcs,l,wname); 注:本博文为EbowTang原创,后续可能继续更新本文。如果转载,请务必复制本条信息!
原文地址:http://blog.csdn.net/ebowtang/article/details/40481539
原作者博客:http://blog.csdn.net/ebowtang
参考资源:
【1】《数字图像处理》(冈萨雷斯matlab第二版)
【2】 Donoho D L. De-noising by soft-thresholding. IEEE Trans- actions on Information Theory, 1995, 41(3): 613−627
【3】 Donoho D L, Johnstone I M. Adapting to unknown smooth- ness via wavelet shrinkage. Journal of the American Statistic
Association, 1995, 90(432): 1200−1224
【4】 Donoho D L, Johnstone I M, Kerkyacharian G, Picard D. Wavelet shrinkage: asymptopia? Journal of Royal Statisti-
cal Society Series B, 1995, 57(2): 301−369
【5】杨恢先,王绪四,改进阈值与尺度间相关的小波红外图像去噪
【6】《小波分析及其应用》,孙延奎著
【7】杨建国.小波分析及其工程应用[M].北京:机械工业出版社.2005
【8】毛艳辉.小波去噪在语音识别预处理中的应用.上海交通大学硕士学位论文.2010
【9】matlab各种函数说明,及其内部函数实现
【10】http://www.bearcave.com/misl/misl_tech/wavelets/haar.html















 959
959

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









