






四旋翼无人机simulink轨迹跟踪 mpc 文档解释说明
ID:9938674327330628
Tttfhhdvbjcv
在现代科技的快速发展下,无人机已经逐渐成为了人们生活中不可或缺的一部分。而在无人机的控制系统中,轨迹跟踪一直是一个非常重要的研究方向。在这篇文章中,我们将会探讨使用Simulink和模型预测控制(MPC)算法来实现四旋翼无人机的轨迹跟踪。
首先,让我们来了解一下Simulink。Simulink是一款非常强大的多域仿真平台,它可以帮助开发人员进行系统级建模和仿真,从而更好地理解和分析系统的行为。对于无人机控制系统的开发来说,Simulink可以提供丰富的工具和模块,帮助工程师们进行系统建模和控制算法的设计。
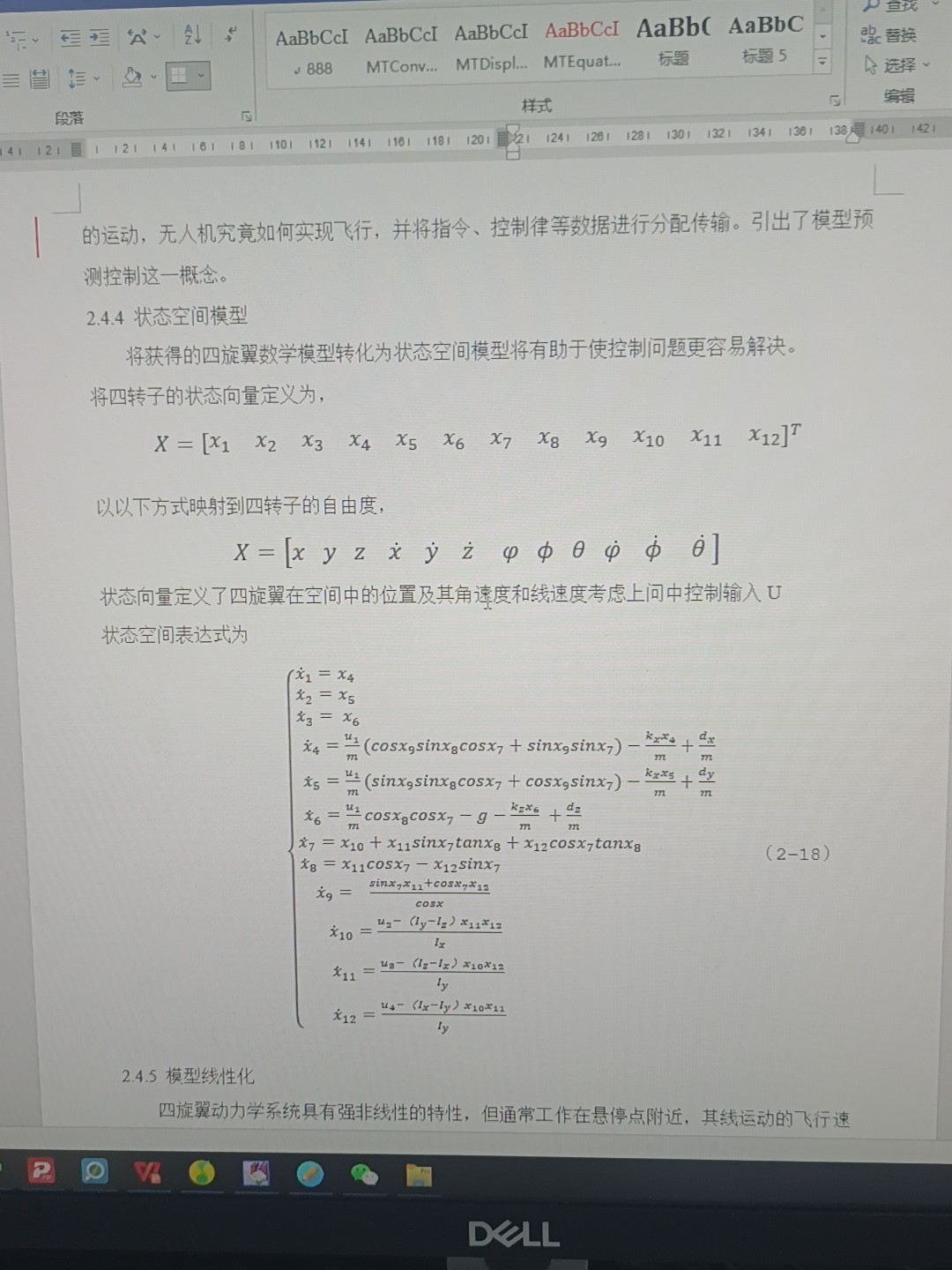
在本文中,我们将使用Simulink来建立四旋翼无人机的数学模型。通过对无人机的动力学特性进行建模,我们可以更好地理解无人机的行为,并且可以将其应用于控制算法的设计中。同时,Simulink还可以提供仿真环境,帮助我们验证和优化控制算法的性能。
接下来,我们将介绍模型预测控制(MPC)算法。MPC是一种基于模型的控制方法,通过在每个时刻的状态测量值和未来一段时间内的参考轨迹之间进行优化,来生成控制指令。相比传统的PID控制算法,MPC能够更好地处理系统的约束条件,并且能够在有限时间内优化控制性能。
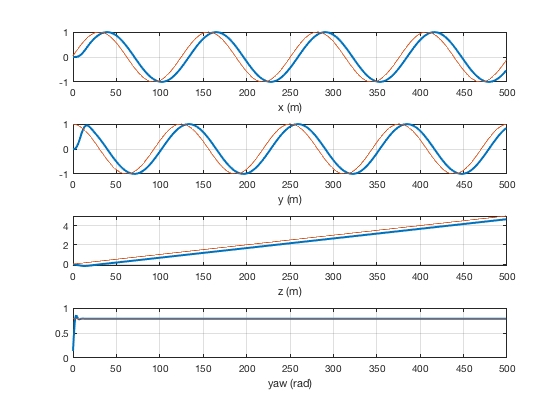
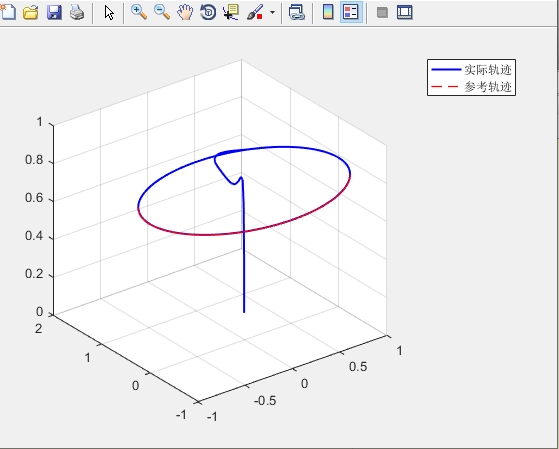
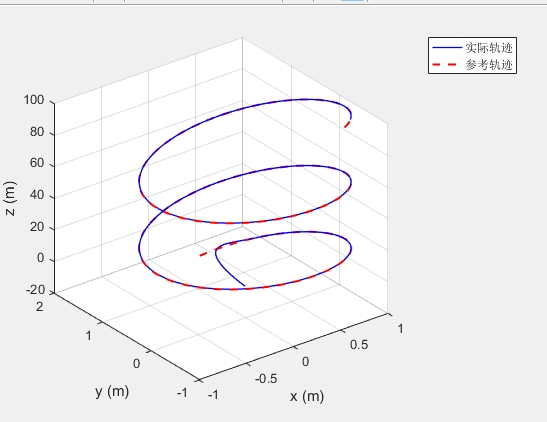
在本文中,我们将使用MPC算法来实现四旋翼无人机的轨迹跟踪。首先,我们将将参考轨迹进行参数化,并将其作为MPC算法的输入。然后,我们将建立无人机的数学模型,并将其与MPC算法进行耦合。通过对MPC算法进行调整和优化,我们可以实现无人机沿着参考轨迹进行精确的轨迹跟踪。
最后,让我们对本文的内容进行一个总结。通过使用Simulink和模型预测控制算法,我们可以实现四旋翼无人机的轨迹跟踪。Simulink提供了丰富的工具和模块,帮助我们进行系统建模和控制算法的设计。而通过MPC算法,我们可以处理系统的约束条件,并且实现精确的轨迹跟踪。通过这篇文章的介绍和解释,我们希望能够为读者们提供有关无人机控制系统的一些启示和思路。
相关的代码,程序地址如下:http://wekup.cn/674327330628.html
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









