








-
TF与SD卡本质上来说都是flash类型的存储器
可以理解为TF卡是SD卡的升级版,体积小功能强大,SD卡是传统意义上的存储卡,适用范围比较广,而SD卡的驱动方式有两种 SDIO 和 SPI,同理TF卡也是一样
(在资源足够的情况下,SDIO更适合SD/TF卡)当然SPI也是没问题的
SPI驱动(TF)SD卡
-
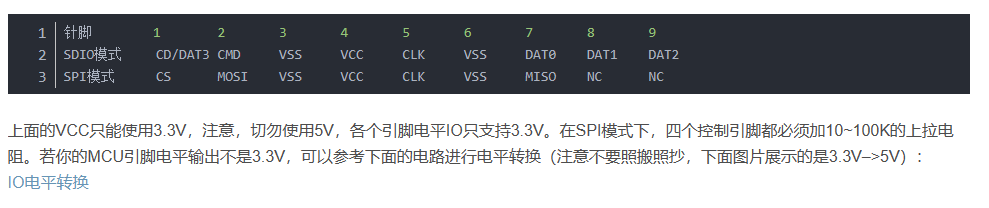
四线要求,全部外接上拉电阻,建议软件管理片选方便操作
-
对于SD卡的SPI模式在上电同步后应该马上进行CM0复位进入SPI模式,SDIO模式这步非必要,复位时序在正常情况下都是要求四线都是高电平,这也是为什么外接上拉电阻的原因,如果CS交给硬件管理,那么只会在发送数据的时候拉低CS,完成马上拉高CS,所以不符合这里的时序,还有一个问题就是MOSI在空闲时必须保持高电平,这点非常重要,就算外接上拉电阻复用后也会被拉下来,因为是输出,默认是输出低电平的,所以在发送时钟脉冲的时候MOSI初始为输入IO口就好了,在需要发送数据之前在复用到SPI上
时钟脉冲:想一下SPI发送数据的时候是不是SCK,MOSI,MISO这几根线都会跳动,但是这里需要的始终脉冲期间MOSI和CS必须保持高电平,所以是不是我们只要不复用MOSI然后发数据是不是就可以实现SCK的跳动达到脉冲
SD 卡在初始化的时候,SPI_CLK 的时钟频率不能超过 400KHz(这里非常重要,已经实践过频率过大确实会初始化失败)
3.SPI必须MODE3 初始化的时候 MOSI 和 CS需要自己管理 初始化的话有三种协议 SD V2.0 SD V1.0 MMC
其中 SD V2.0最常见也是目前用的比较多的
SD2.0初始化
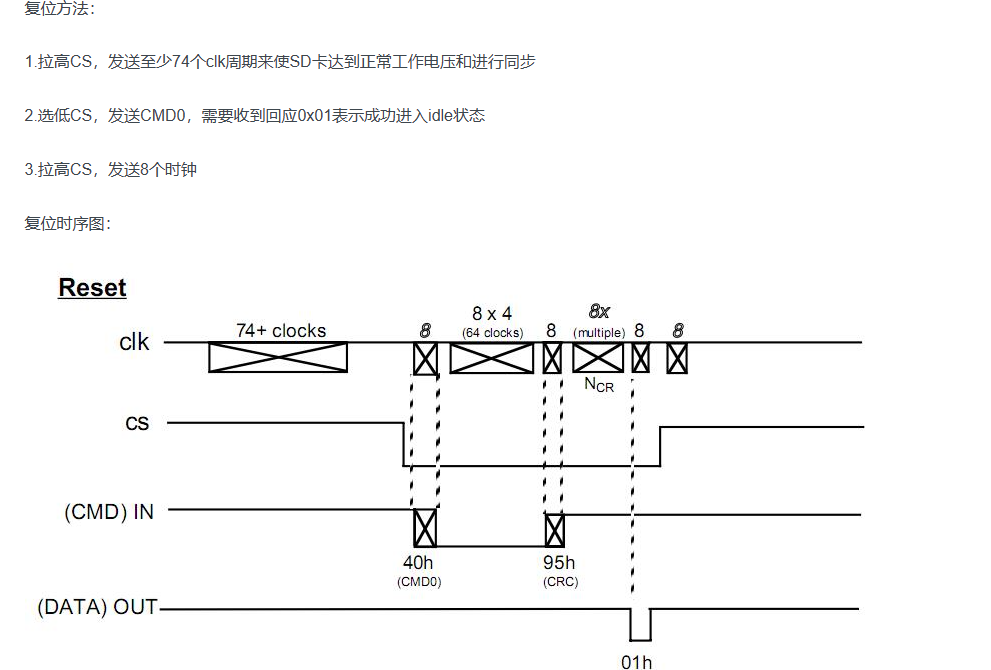
1、先对从机 SD 卡发送至少 74 个以上的同步时钟,在上电同步期间,片选 CS 引脚和 MOSI 引脚必须为高电平(MOSI 引脚除发送命令或数据外,其余时刻都为高电平)
2,拉低片选 CS 引脚,发送命令 CMD0(0x40)复位 SD 卡,等待返回数据
3,在接收返回信息期间片选 CS 为低电平,判断数据为复位完成信号 0x01,SD 卡返回响应数据的 8 个时钟周期后再拉高片选 CS 信号,SD 卡进入 SPI 模式。如果返回其他值,重新上一步。
4,拉低片选 CS 引脚,发送命令 CMD8(0x48)查询 SD 卡的版本号,等待返回数据。
5,SD 卡返回响应数据后,先等待 8 个时钟周期再拉高片选 CS 信号,此时判断返回的响应数据,如果为4'b0001,(即2.7V~3.6V), SD卡位2.0版本,否则上一步。
6、拉低片选 CS 引脚,发送命令 CMD55(0x77)告诉 SD 卡下一次发送的命令是应用相关命令,等待返回数据。
7、SD 卡返回响应数据后,先等待 8 个时钟周期再拉高片选 CS 信号,此时判断返回的响应数据。如果返
回的数据为空闲信号 0x01,开始进行下一步
8、拉低片选 CS 引脚,发送命令 ACMD41(0x69)查询 SD 卡是否初始化完成,等待返回数据。
9、SD 卡返回响应数据后,先等待 8 个时钟周期再拉高片选 CS 信号,此时判断返回的响应数据若为0x00,则初始化完成。否则第6步。
SD 卡在初始化的时候,SPI_CLK 的时钟频率不能超过 400KHz,在初始化完成之后,再将 SPI_CLK 的时钟频率切换至SD 卡的最大时钟频率。
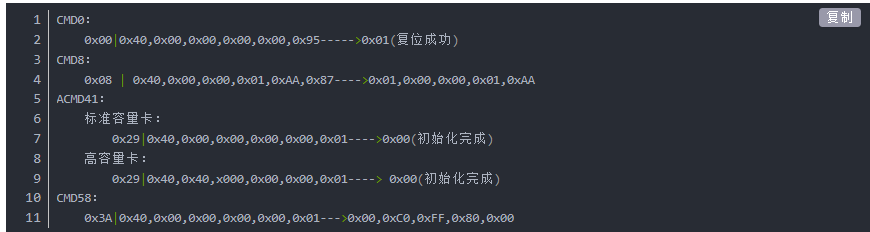
以下为复位初始化用到的指令以及对应的返回数据
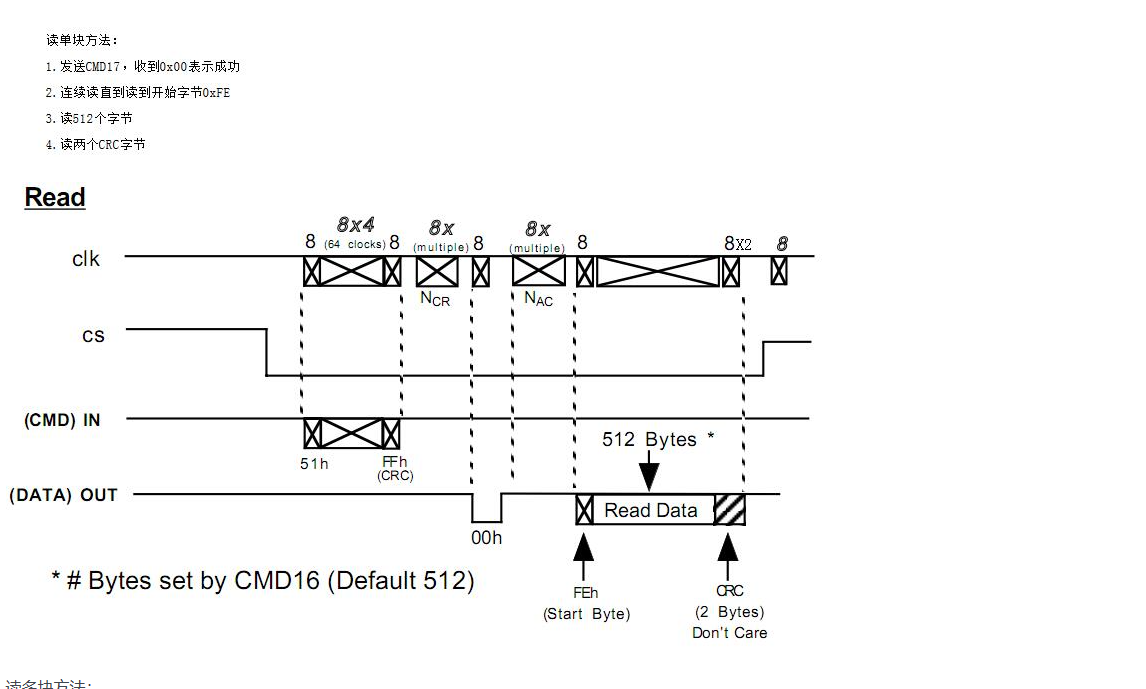
以下为读数据用到的指令 单块读
CMD17:
17|0X40, 块地址,块地址,块地址,块地址,0x01 返回 0x00 其中块地址32位,寻址范围4G多,符合逻辑
多块读
CMD18:
18|0X40, 块地址,块地址,块地址,块地址,0x01 返回 0x00
停止命令
CMD12:
12|0x40,0x00,0x00,0x00,0x00,0x01
以下为写数据常用的指令 单块写
CMD24:
24|0X40, 块地址,块地址,块地址,块地址,0x01 返回 0x00
多块写
CMD25:
25|0X40, 块地址,块地址,块地址,块地址,0x01 返回 0x00
32MB以下的为标准容量
32MB-4GB为大容量
这里我驱动的是4GB的大容量TF卡 里面是以块进行区分 一个块占 512byte 地址以此对齐 可以直接写入不需要擦除,数据会自动覆盖 SPI的通信速率最高到12M
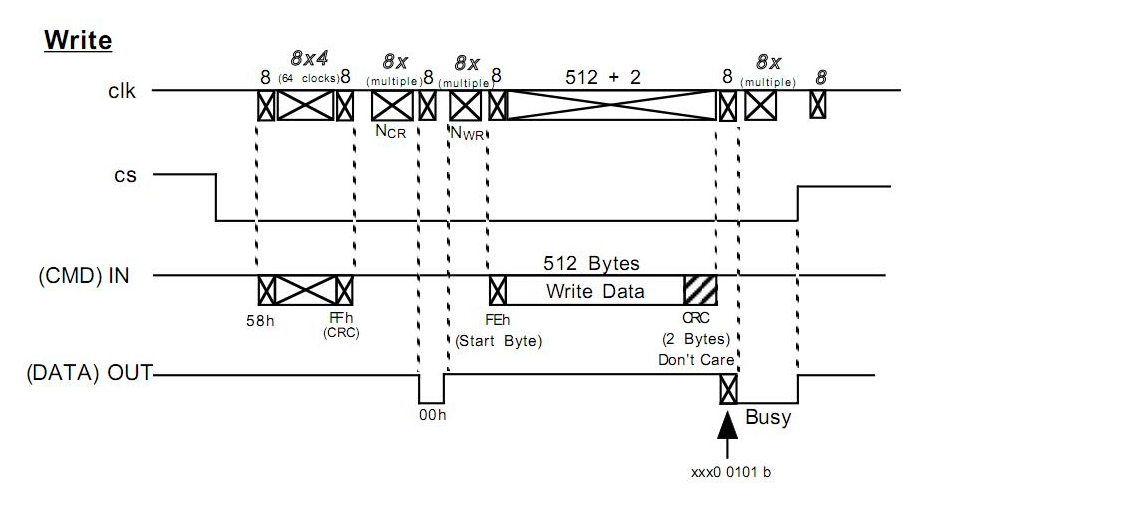
写单块方法:
1.发送CMD24,收到0x00表示成功
2.发送若干时钟
3.发送写单块开始字节0xFE
4.发送512个字节数据
5.发送2字节CRC(可以均为0xff)
6.连续读直到读到XXX00101表示数据写入成功
7.继续读进行忙检测(读到0x00表示SD卡正忙),当读到0xff表示写操作完成
写单块时序图:
源码
//***************************************************************************************************************************
//TF卡 SPI通信读取 MISO - PC4 SD_CLK - PC3 MOSI - PC5 CS - PC2 SPI1(1-2) SPI0(0开头)
SPI_Handle_T hSPI;//SPI句柄
SPI_TransferConfig_T pTransferConfig;//通信参数配置句柄
void SPI0_Init(void)
{
HAL_CLOCK_PeripheralClockEnable0(SYS_ENCLK0_GPIO);
HAL_CLOCK_PeripheralClockEnable1(SYS_ENCLK1_SPI1);
//片选脚自己管理
HAL_GPIO_Init_Output(GPIOC,GPIO_PIN_2,GPIO_DRIVING_LEVEL0);
HAL_GPIO_Init_Alternate(GPIOC,GPIO_PIN_3,GPIOC3_AF3_SPI0_SCK);
HAL_GPIO_Init_Alternate(GPIOC,GPIO_PIN_4,GPIOC4_AF3_SPI0_MISO);
//SPI控制器配置 MODE 3
SPI_Config_T pConfig = {0};
HAL_SPI_GetDefaultConfig(&pConfig,&pTransferConfig,SPI_MASTER_MODE);
pConfig.mode = SPI_MASTER_MODE;//主模式
pConfig.format = SPI_FORMAT_MOTOLORA;//SPI模式
pConfig.polarity = SPI_CLOCK_POLARITY_HIGH;//时钟极性
pConfig.phase = SPI_CLOCK_PHASE_START;//时钟相位
pConfig.bitOrder = SPI_BIT_ORDER_MSB;
pConfig.singleWire = SPI_FULL_DUPLEX;//双线
pConfig.baudRate = 1000000;//时钟分频 = 200M/50M SPI输出时钟 = 48/时钟分频 SD 卡在初始化的时候,SPI_CLK 的时钟频率不能超过 400KHz
HAL_SPI_Init(SPI0_DEV,&pConfig,&hSPI);
HAL_SPI_TransferConfig(&hSPI,&pTransferConfig);//更新通信配置
//SPI传输配置
SPI0_DEV->CTRL &= ~(1<<4);//MSB
SPI0_DEV->CTRL |= 1;//SPI使能
hSPI.dataWidth = 1;//数据帧字节大小S
//hSPI.frameDelay = 1;//延迟帧
SPI0_NSS_H;
}
//发送1byte数据的同时接收1byte
uint8_t SPI0_Sendread(uint8_t data)
{
uint32_t count = 200;
while(!(SPI0_DEV->SR & (1<<8)))//等待发送FIFO为空
{
count--;
TIM2_Delay_ms(1);
if(count == 0) return 0xaa;
}
SPI0_DEV->DR = data & 0xff;
while(!(SPI0_DEV->SR & (1<<19)))//等待接受FIFO非空
{
count--;
TIM2_Delay_ms(1);
if(count == 0) return 0xaa;//超时错误值
}
return SPI0_DEV->DR & 0xff;
}
//命令数据格式 uint8_t *buff传入装一帧数据的数组地址
// uint8_t CMD_value 指定命令的序号 比如CMD0就填0 不支持的命令将打印错误
// 返回填充好命令的数据地址
uint8_t * TF_CMD(uint8_t *buff,uint8_t CMD_value)
{
switch(CMD_value)
{
case 0:
*buff = 0x00 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x95;
break; // The CMD res 0X01 (复位成功)
case 1:
*buff = 1 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0xff;
break; // The CMD res 0X01 (复位成功)
case 8:
*buff = 8 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x01;
*(buff + 4) = 0xAA;
*(buff + 5) = 0x87;
break;// The CMD res 0X01 0x00 0x00 0x01 0xaa
case 12:
*buff = 12 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// 停止命令 用来停止多块读
case 17:
*buff = 17 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// 单块读 中间4字节参数为地址,这里只是初始化 返回0x00
case 18:
*buff = 18 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// 多块读 中间4字节参数为地址,这里只是初始化 返回0x00
case 24:
*buff = 24 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// 单块写 中间4字节参数为地址,这里只是初始化 返回0x00
case 25:
*buff = 25 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// 多块写 中间4字节参数为地址,这里只是初始化 返回0x00
case 55:
*buff = 55 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// send ACMD41 之前必须发送该命令
case 58:
*buff = 58 | 0x40;
*(buff + 1) = 0x00;
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// The CMD res 0X00 0xc0 0xff 0x080 0x00 电压范围 2.7-3.6V
case 41:
*buff = 41 | 0x40;
*(buff + 1) = 0x40;//高容量40 标准容量 00
*(buff + 2) = 0x00;
*(buff + 3) = 0x00;
*(buff + 4) = 0x00;
*(buff + 5) = 0x01;
break;// The CMD res 0x00 初始化完成 ACMD41发送之前需要发送 CMD55
default:printf("CMD ERROE!\n");break;
}
return buff;
}
//TF卡发送时钟脉冲 同步上电 时钟脉冲个数 时钟脉冲期间CS和MOSI必须为高电平 1num = 8个时钟脉冲
void TF_Send_clocks(uint8_t num)
{
uint8_t txbuff = 0xff;
uint8_t rxbuff = 0;
HAL_GPIO_Init_Input(GPIOC,GPIO_PIN_5,GPIO_NOPULL);//输入模式拉高MOSI
for(uint8_t i = 0;i < num;i++)
{
//HAL_SPI_TransmitReceive(&hSPI,&txbuff,&rxbuff,1,1,TIMEOUT_WAIT_FOREVER);
SPI0_Sendread(0xff);
}
}
//TF卡发送命令 并接收相对应的数据 如果匹配则表示命令成功
// uint8_t CMDNum为命令序号 返回接收到的数据 第一个数据在低位
uint32_t TF_Send_CMD(uint8_t CMDNum)
{
uint8_t Txbuff[6] = {0};
uint32_t data = 0;
TF_CMD(Txbuff,CMDNum);//命令填充
SPI0_NSS_L;//片选拉低开始建立通信
HAL_GPIO_Init_Alternate(GPIOC,GPIO_PIN_5,GPIOC5_AF3_SPI0_MOSI);//MOSI复用
for(uint8_t i = 0;i<6;i++)
{
SPI0_Sendread(Txbuff[i]);
}
HAL_GPIO_Init_Input(GPIOC,GPIO_PIN_5,GPIO_NOPULL);//输入模式拉高MOSI
SPI0_Sendread(0x00);//等待一个8位数据后接收数据
data |= SPI0_Sendread(0x00) & 0xff;
data |= (SPI0_Sendread(0x00) & 0xff) << 8;
data |= (SPI0_Sendread(0x00) & 0xff) << 16;
data |= (SPI0_Sendread(0x00) & 0xff) << 24;
SPI0_NSS_H;//CS拉高后给时钟脉冲
TF_Send_clocks(2);
return data;
}
//TF卡一帧数据为6byte 上电初始化复位TF卡 SPI的输入输出脚已经被外接上拉电阻 还有CS也被上拉
void TF_RES_Init(void)
{
uint32_t data = 0;
uint8_t num = 250;
uint8_t res = 0;
uint8_t count = 0;
SPI0_Init();
L:
TIM2_Delay_ms(300);//等待上电稳定
//发送大于74个时钟脉冲
TF_Send_clocks(30);
data = TF_Send_CMD(0);//发送命令0
if((data & 0xff) == 0x01)
{
res = 1;
}
//复位成功 进入IDLE状态
if(res)
{
data = TF_Send_CMD(8);//CMD 8 查询是否2.0SD卡还是MMC卡
if((data & 0x0f) == 0x01)//SD V2.0
{
while(num--)
{
data = TF_Send_CMD(55);
if((data & 0xff) == 0x01)//表示使用ACMD命令
{
data = TF_Send_CMD(41);
if((data & 0xff) == 0x00)
{
printf("SD-SPI V2.0 Init 0K 2.7~3.3V!\n");
//初始化完可以进行提速
SPI0_DEV->CTRL &= ~1;//SPI失能能
SPI0_DEV->BR = 4;// 总线48Mhz 这里是分频 如果通信不稳定就降低速率 这里只能填偶数
SPI0_DEV->CTRL |= 1;//SPI使能
TF_Send_clocks(50);//时钟脉冲
return;
}
}
}
printf("SD V2.0 ERROR!\n");
}
else//SD V1.X/MMC V3
{
TF_Send_CMD(55);
data = TF_Send_CMD(41);
if((data & 0xff) <= 0x01)// 1 || 0 表示进入 SD V1.0
{
while(num--)
{
data = TF_Send_CMD(55);
if((data & 0xff) == 0x01)//表示使用ACMD命令
{
data = TF_Send_CMD(41);
if((data & 0xff) == 0x00)
{
printf("SD-SPI V1.0 Init 0K!\n");
return;
}
}
}
printf("SD V1.0 ERROR!\n");
}
else//MMC卡不支持 CMD55 + CMD41
{
data = TF_Send_CMD(1);//CMD1
while(num--)
{
if(data == 0x00)
{
printf("MMC-SPI Init 0K!\n");
return;
}
data = TF_Send_CMD(1);
}
printf("MMC ERROR!\n");
}
}
}
else
{
count++;
if(count < 3)
{
goto L;
}
else
{
SPI0_NSS_H;
TF_Send_clocks(2);
printf("RES_ERROR\n");
}
}
}
//读取块数据 一块读 512byte 返回0读取成功
//uint32_t chunkaddr 要读取的块地址 1表示块1的地址
//uint8_t *Rbuff 读取数据的缓冲区
uint8_t TF_Readdata(uint32_t chunkaddr,uint8_t *Rxbuff)
{
uint8_t Tbuff[6] = {0};
uint8_t data = 0xff;
uint8_t num = 20;
uint16_t delay = 500;//超时判断值
chunkaddr *= 512;
TF_CMD(Tbuff,17);//CMD17填充
Tbuff[1] = chunkaddr >> 24;//地址参数填充
Tbuff[2] = chunkaddr >> 16;
Tbuff[3] = chunkaddr >> 8;
Tbuff[4] = chunkaddr & 0xff;
// 读取命令填充完毕
SPI0_NSS_L;//CS拉低开始通信
HAL_GPIO_Init_Alternate(GPIOC,GPIO_PIN_5,GPIOC5_AF3_SPI0_MOSI);//MOSI复用
for(uint8_t i = 0;i < 6;i++)
{
SPI0_Sendread(Tbuff[i]);
}
HAL_GPIO_Init_Input(GPIOC,GPIO_PIN_5,GPIO_NOPULL);//输入模式拉高MOSI
SPI0_Sendread(0x00);//等待一个8位数据后接收数据(提速后需要思考这里)
while(num--)
{
data = SPI0_Sendread(0x00);
if(data == 0)//CMD生效
{
while(delay)//开始读
{
data = SPI0_Sendread(0x00);
if(data == 0xfe)//数据起始字节
{
for(uint16_t i = 0;i < 512;i++)
{
Rxbuff[i] = SPI0_Sendread(0x00);
}
SPI0_Sendread(0x00);//两个CRC直接忽略
SPI0_Sendread(0x00);//两个CRC直接忽略
break;
}
delay--;
}
SPI0_NSS_H;//CS拉高结束通信
TF_Send_clocks(2);//时钟脉冲
if(delay == 0) return 1;
else return 0;
}
}
SPI0_NSS_H;//CS拉高结束通信
TF_Send_clocks(2);//时钟脉冲
return 1;
}
//写入数据到块 一次写一块 512byte 返回0写入成功
//uint32_t chunkaddr 要写入的块地址 1表示块1的地址
//uint8_t *Rbuff 写入数据的缓冲区 最少512
uint8_t TF_Writedata(uint32_t chunkaddr,uint8_t *Txbuff)
{
uint8_t Tbuff[6] = {0};
uint8_t data = 0xff;
uint8_t num = 20;
uint16_t delay = 500;//超时判断值
chunkaddr *= 512;
TF_CMD(Tbuff,24);//CMD24填充
Tbuff[1] = chunkaddr >> 24;//地址参数填充
Tbuff[2] = chunkaddr >> 16;
Tbuff[3] = chunkaddr >> 8;
Tbuff[4] = chunkaddr & 0xff;
// 读取命令填充完毕
SPI0_NSS_L;//CS拉低开始通信
HAL_GPIO_Init_Alternate(GPIOC,GPIO_PIN_5,GPIOC5_AF3_SPI0_MOSI);//MOSI复用
for(uint8_t i = 0;i < 6;i++)
{
SPI0_Sendread(Tbuff[i]);
}
HAL_GPIO_Init_Input(GPIOC,GPIO_PIN_5,GPIO_NOPULL);//输入模式拉高MOSI
SPI0_Sendread(0x00);//等待一个8位数据后接收数据(提速后需要思考这里)
while(num--)
{
data = SPI0_Sendread(0x00);
if(data == 0)//CMD生效
{
TF_Send_clocks(2);//发送一点时钟脉冲
HAL_GPIO_Init_Alternate(GPIOC,GPIO_PIN_5,GPIOC5_AF3_SPI0_MOSI);//MOSI复用
SPI0_Sendread(0xFE);//开始字节
for(uint16_t i = 0;i<512;i++)
{
SPI0_Sendread(Txbuff[i]);
}
SPI0_Sendread(0xff);//两个CRC
SPI0_Sendread(0xff);//两个CRC
HAL_GPIO_Init_Input(GPIOC,GPIO_PIN_5,GPIO_NOPULL);//输入模式拉高MOSI
while(delay)
{
data = SPI0_Sendread(0xff);//连续读
if((data & 0x1f) == 0x05)//表示写操作成功
{
while(delay)
{
data = SPI0_Sendread(0xff);//连续读
if(data == 0xff)//直到不忙碌
{
break;
}
delay--;
}
break;
}
delay--;
}
SPI0_NSS_H;//CS拉高结束通信
TF_Send_clocks(2);//时钟脉冲
if(delay == 0) return 1;
else return 0;
}
}
printf("CMD ERROR\n");
SPI0_NSS_H;//CS拉高结束通信
TF_Send_clocks(2);//时钟脉冲
return 1;
}
//读取块数据 一块读 512byte 返回0读取成功
//uint32_t chunkaddr 要读取的块地址 1表示块1的地址
//uint8_t *Rbuff 读取数据的缓冲区
//uint32_t chunklen 为要读取的块数量
uint8_t TF_ReadSector(uint32_t chunkaddr,uint8_t *Rxbuff,uint32_t chunklen)
{
uint8_t res = 1;
if(chunklen == 0) return 1;
while(chunklen)
{
res = TF_Readdata(chunkaddr,Rxbuff);
chunkaddr += 1;
Rxbuff += 512;
chunklen--;
}
return res;
}
//写入数据到块 一次写一块 512byte 返回0写入成功
//uint32_t chunkaddr 要写入的块地址 1表示块1的地址
//uint8_t *Rbuff 写入数据的缓冲区 最少512
//chunklen 要写入块的数量
uint8_t TF_WriteSector(uint32_t chunkaddr,uint8_t *Txbuff,uint32_t chunklen)
{
uint8_t res = 1;
if(chunklen == 0) return 1;
while(chunklen)
{
res = TF_Writedata(chunkaddr,Txbuff);
chunkaddr += 1;
Txbuff += 512;
chunklen--;
}
return res;
}
//******************************************************************************************************************************************************
补充:
后续使用功能的时候发现了一个BUG,就是写好的读写函数在访问14000以上的块地址时失败,且固定失败 返回0x08,但是在这个快地址以下是没有一点问题的,我寻思不是有700多万块嘛,后来找到了原因,
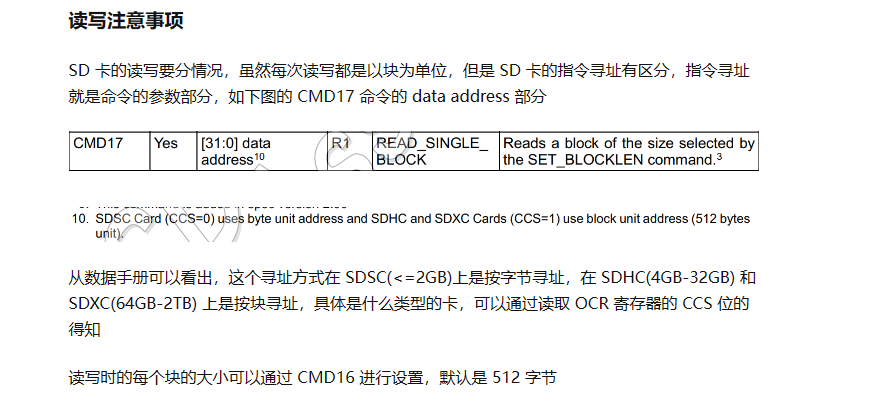
寻址方式不同,我的卡是SDHC大容量卡 之前按字节去寻址 块地址默认乘了一个512


















 1238
1238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









