






作者丨happy
编辑丨极市平台
本文原创首发于极市平台公众号,转载请获得授权并标明出处。
arXiv:https://arxiv.org/abs/2108.11250
code:https://github.com/hustvl/YOLOP
code@opencv:https://github.com/hpc203/YOLOP-opencv-dnn
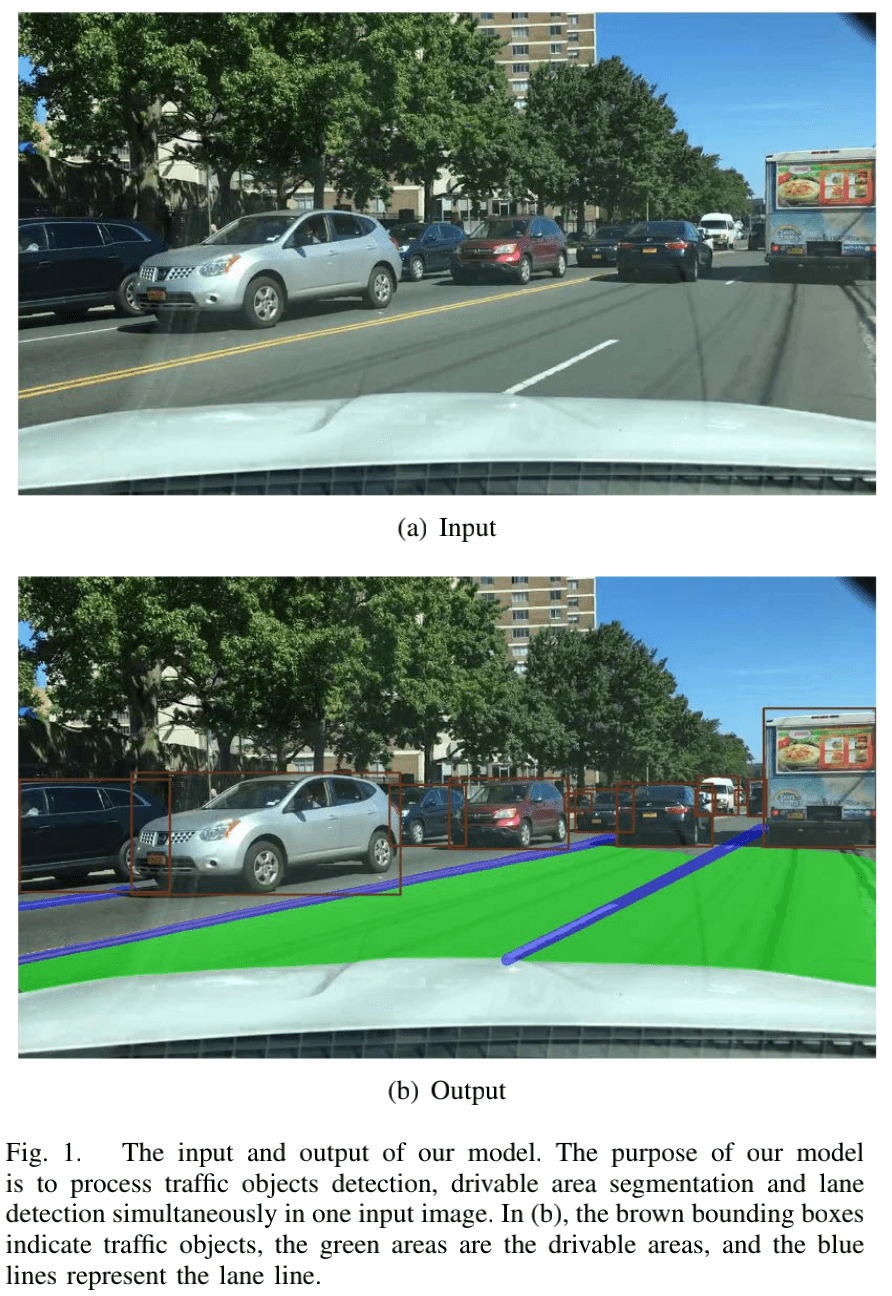
本文是华中科技大学王兴刚团队在全景驾驶感知方面的工作,提出了一种能够在嵌入式平台上实时处理三个感知任务(目标检测、可驾驶区域分割、车道线检测)的方案YOLOP。所提YOLOP不仅具有超高的推理速度,同时在极具挑战性的BDD100K三个任务上均取得了非常优异的性能。
Abstract
全景驾驶感知系统是自动驾驶非常重要的一部分,实时高精度感知系统可以帮助车辆作出合理的驾驶决策。
我们提出一种全景驾驶感知网络YOLOP同时进行交通目标检测、驾驶区域分割以及车道线检测。YOLOP包含一个用于特征提取的编码,三个用于处理特定任务的解码器。所提方案在极具挑战的BDD100K数据集上表现非常好,从精度与速度角度来看,所提方法在三个任务上取得了SOTA性能。此外,我们还通过消融实验验证了多任务学习模型的有效性。
据我们所知,该工作是首个可以在嵌入式设备(Jetson TX2)上实时 处理三个视觉任务任务的方案,同时具有非常优异的精度。















 1674
1674











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









