







 论文提出了一种使用分数阶傅里叶变换的车载雷达通信一体化解决方案,旨在解决频谱资源浪费和系统间的干扰问题。在多用户场景下,通过CDMA和BFSK调制减少干扰,同时利用FrFT和干扰减轻策略改善雷达检测性能。此外,分析了不同信号干扰功率比对通信误比特率(BER)的影响,表明更长的PN序列可提高通信质量但会降低比特率。
论文提出了一种使用分数阶傅里叶变换的车载雷达通信一体化解决方案,旨在解决频谱资源浪费和系统间的干扰问题。在多用户场景下,通过CDMA和BFSK调制减少干扰,同时利用FrFT和干扰减轻策略改善雷达检测性能。此外,分析了不同信号干扰功率比对通信误比特率(BER)的影响,表明更长的PN序列可提高通信质量但会降低比特率。
论文背景:雷达与通信系统的分离浪费了天线、数字信号处理、收发机等相似的硬件,难以避免两个系统之间的干扰,不能充分利用频谱资源。
论文提出了一种基于分数阶傅里叶变换(FrFT)的车载雷达通信一体化系统。在多用户场景下研究了该系统的性能,即多个用户同时共享同一带宽。
车载雷达通信一体化系统以雷达为主要,通信为次要。次要功能不应干扰联合系统的主要功能,但应充分利用所提供的频率和空间分配。
论文主要关注多用户环境中的检测性能。在这种情况下,来自其他用户的信号被视为干扰信号,因为它导致雷达性能下降。因此,引入干扰减轻方案以降低干扰信号的功率。另外,在干扰用户靠近雷达的情况下,针对不同的信号干扰功率比(SIR)值评估通信性能。干扰和用户同时也共享相同的带宽,这导致了高的相互干扰。为了解决这个问题,使用码分多址(CDMA)来降低在相同信道接入的不同用户之间的相互干扰。
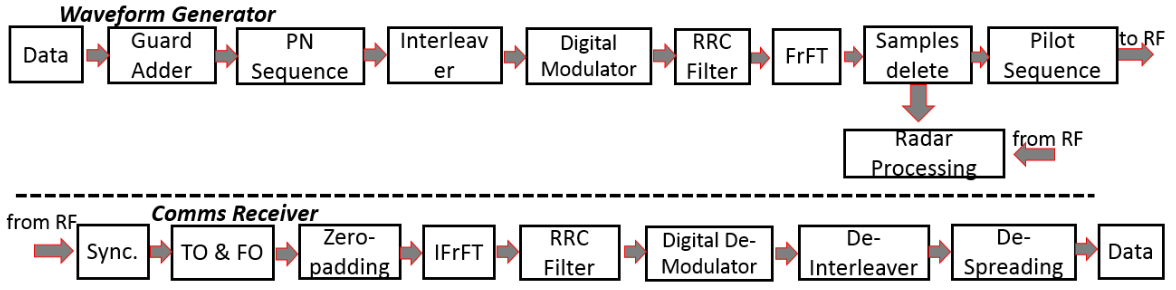
波形产生
发送:
首先,从发射源产生N比特的信息序列。对于N比特信息序列,G个保护比特被添加在序列的末尾,以便补偿由根升余弦(RRC)滤波器引入的延迟组。在该序列上,直接序列码分多址(DS-CDMA)被应用于使用不同码的复用用户。在该框架中,使用伪噪声码(PN码),这导致(N + G)× L 比特的扩展序列。
PN发生器能够为发射机和接收机创建相同的序列,并保留噪声随机性比特序列的期望属性
交织器还用于减轻在具有强衰落的情况下突发错误的影响。交织器仅应用于N × L位,目的是将突发错误扩展到整个扩展序列。
选择的数字调制器是二进制频移键控(BFSK),其中通过载波信号的离散频率变化来传输数字信息。该方案为每个符号分配 Ns 个采样点,并为每个符号分配一个带宽 ,得到(N+G)× L× Ns个长符号序列。
RRC滤波器用于最小化可能由信道引起的符号间干扰(ISI)。为了提高效率,它被实现为一个多速率滤波器,以因子Rs对输出进行上采样,得到(N+G)×L×Ns×Rs个样本的最终序列。
在应用RRC滤波器之后获得的序列在时间-频率域中被映射为具有特定分数阶α。在应用FrFT之后,为了将发射功率保持在接近恒定的水平并获得FMCW,进行波形样本移除过程,对强度低的样本进行移除。
样本移除过程之后的相干处理间隔(CPI)的谱图如下。
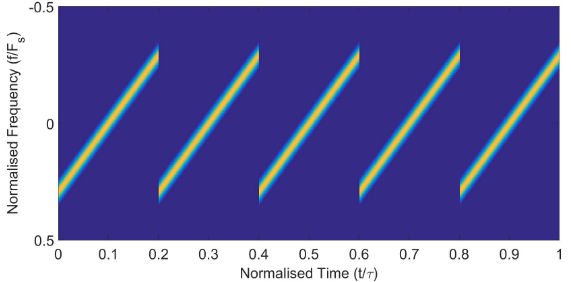
对于单个CPI,在每个波形中映射相同的信息位,并且使用相同的阶数α。信息的比特分别从CPI到CPI变化。序列导频也在每个CPI的开始处发送。
导频由两个信号组成,分别应用了两个不同阶数 α 和 −α 的FrFT。这样的导频可以由通信接收机用来估计接收信号的时间和频率偏移。
多用户场景使用标识来区分不同的用户/发射机:每个用户生成具有与用于将数据信息映射到雷达波形中的阶数α相同的阶数α的导频序列。
对接收到的信号,应用匹配滤波器和快速傅立叶变换(FFT)处理来提取目标的距离和多普勒频率。
接收:
通过在接收信号上应用与不同导频序列匹配的滤波器组来执行发射机和接收机之间的同步。在正确识别导频序列之后,使用阶数为Q1 = 1 − α和Q2 = −(1 − α)的两个FrFT来估计时间和频率偏移,逆FrFT(IFrFT)的输入长度必须与传输中FrFT之后的信号长度相同。为此,在接收信号的开始和结束处应用零填充。在零填充之后,序列进行 IFrFT。然后,序列通过RRC滤波器,RRC滤波器也以因子Rs对波形进行下采样。根据所采用的调制,序列(N + G)× L位中的(N + G)×L×Ns长符号序列。此时,解交织器执行交织器的逆过程,使用与用于扩展信号完全相同的码,对接收信号应用解扩。接收机将接收到的信号乘以发射机中使用的分配的PN码,并将每个比特周期上的所有值相加。最后,使用阈值等于零的判决规则来恢复N比特。
雷达部分
雷达的性能是根据它在距离-多普勒平面上区分不同目标的能力来评估的。论文考虑了两种情况:无干扰目标和有干扰目标
多目标场景:
在多目标场景中,接收的雷达信号由下式给出:
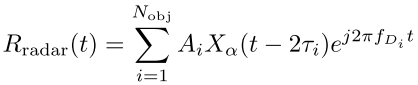
是场景中存在的目标数量,
是从第 i 个目标接收的信号的幅度,
是阶数为 α 的发射雷达信号,
是雷达与第 i 个目标之间的延迟,
是多普勒频率
由一个反射目标在其周围环境中产生的功率由雷达方程给出:
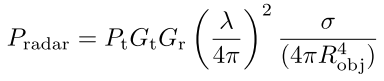
其中、
和
分别是发射功率、发射天线增益和接收天线增益,σ 是反射目标的雷达截面积(RCS),
是反射目标到雷达的距离。
因此由于距离不同,雷达以不同的功率电平接收回波。
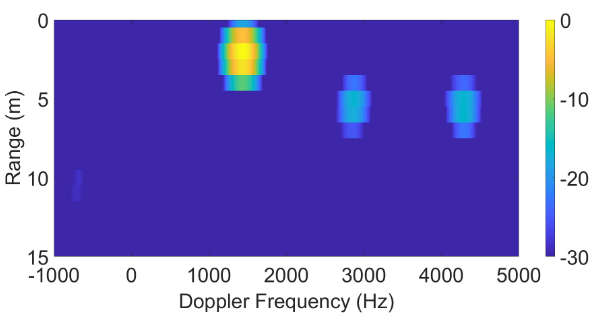
存在四个目标时的雷达图像:
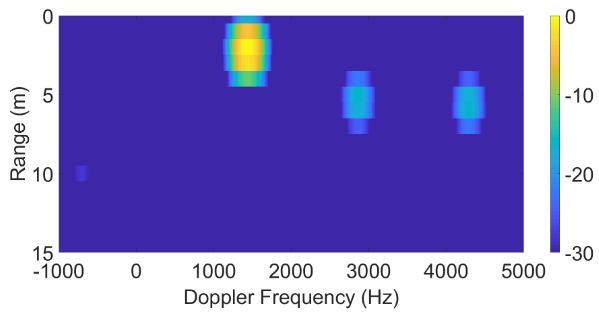
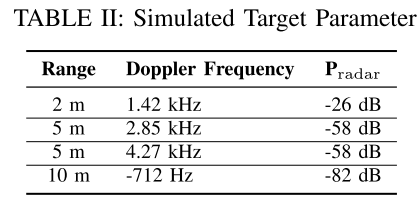
在多目标情况下,距离雷达较近的目标会掩盖距离较远的目标(较远的目标雷达接收的功率较小)。用Blackman Harris窗来降低距离域和多普勒域的旁瓣水平。
从图表中可以得出,即使多个目标位于相同的距离处或者具有不同的距离和多普勒频率,也可以将它们分开。
多用户场景:
在多用户环境中,接收的雷达信号是:
![]()
来自其他用户的信号为:
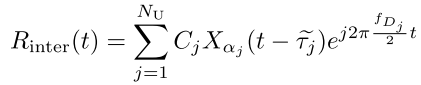
其中 是用户的数量,在论文中等于目标的数量,
是从雷达接收到的干扰信号的幅度,
是雷达和用户之间的时间,
是多普勒频率。由于这个阶段只考虑雷达性能,因此将来自其他用户的信号视为干扰。
Friis方程给出了在雷达处接收的干扰功率的估计:
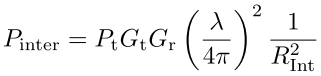
由于目标也是干扰源,因此 。在这种情况下,每个用户使用不同阶次的FrFT。
干扰信号几乎总是高于反射的雷达信号,因此在距离-多普勒图中表现为噪声,导致干扰的增加。
当目标也是干扰源时,未进行干扰消除前的距离多普勒图:
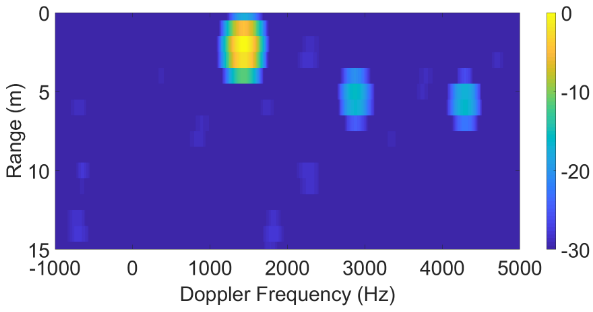
小的功率差可能导致如假目标的出现和低强度目标的掩蔽之类的问题。
当每个用户发射LFMCW波形时的距离-多普勒图:
对比上面的两幅图,可以得到结论:当数据信息嵌入雷达波形时,由于数据之间的相关性,干扰增加。(一开始的是利用论文中生成的雷达通信一体化波形,干扰较多)
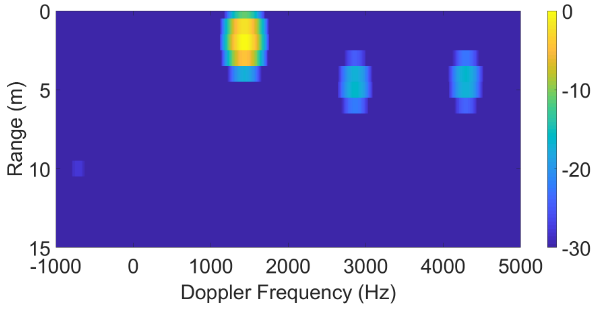
干扰抑制
在目标同时发射通信雷达信号的情况下,可能会产生强干扰。因为雷达也可以访问通信数据,所以在接近精确地重建通信信号的情况下,可以从雷达信号中减去该干扰。
在接收到的信号上,应用通信操作来恢复由其他用户发送的信息比特。当比特被恢复时,系统使用波形发生器来重构干扰信号。在这两个阶段之后,干扰信号以良好的精度被重建,并且它与其它重建信号相加。通过考虑已经接收到通信信号的时间延迟来进行求和。
在这些操作之后,从接收信号中减去重构的通信信号,并且应用雷达处理来区分不同距离和多普勒频移的目标。
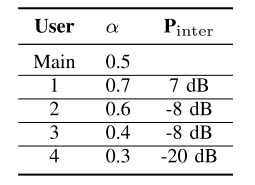
在应用干扰减轻过程之后的距离-多普勒图:
干扰消除之后的距离-多普勒图类似于不存在通信信号时的距离-多普勒图。说明干扰抑制效果很好。
通信部分
两个用户同时在信道上发送信息,并且在相同的频带中操作。从FrFT的两个不同阶次和从相同长度的两个不同PN序列唯一地识别两个用户。
从雷达接收的信号 R(t) 由下式给出:
![]()
其中 S(t) 是从主用户接收的信号,而 I(t) 是从干扰用户接收的信号。
![]()
![]()
其中 和
是信号的幅度,
和
是时间延迟,
和
分别是主用户和干扰用户的多普勒频率。
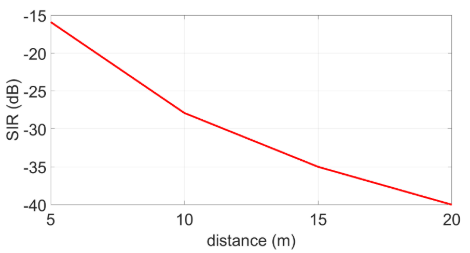
雷达处的 SIR 可以通过用户和干扰用户引起的接收机功率之比来估计:
不同距离下的SIR:
不同SIR下的BER:
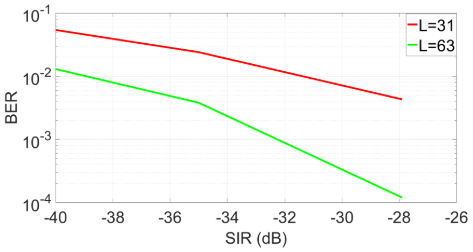
为了获得更好的BER,必须使用更长的PN序列。然而,当使用较长的PN序列时,比特率降低。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











