







在汽车环境下,一个雷达通信一体化系统,能够使用相同的硬件以及两种系统共享同一频谱。
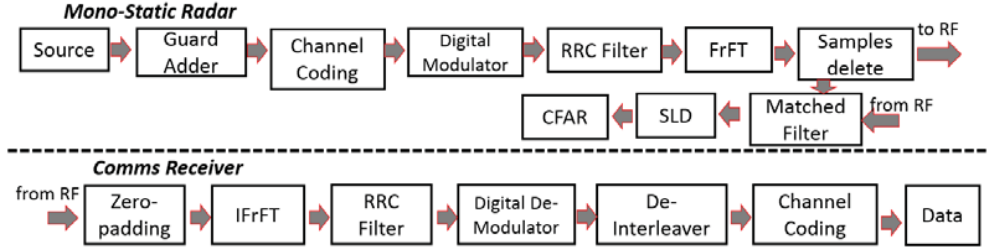
论文中提出的通信雷达一体化系统如图:
框图解读在前几篇论文笔记中,这些论文都属于同一类型。
RRC滤波器在发送过程中是上采样,接收过程中为下采样。
在检测过程中,雷达获取回波并与发射波形进行匹配滤波。在匹配滤波器之后,使用了平方律检测器(SLD)。此外,为了执行检测,将每个波形的幅度与传统的单元平均恒定虚警率(CA-CFAR)进行比较。
CA-CFAR(Cell Averaging Constant False Alarm Rate)是一种常用的雷达信号检测算法,用于检测雷达回波信号中的目标存在与否。
在雷达信号处理中,常常需要进行目标检测,即判断回波信号中是否存在目标。CA-CFAR算法是一种经典的检测算法,它通过对雷达回波信号进行处理,得到一个常数虚警概率,以实现对目标的检测。
CA-CFAR算法的基本思想是将雷达观测区域划分为若干个细胞,然后在每个细胞内计算一个门限值,用于判断该细胞内的信号是否属于目标信号。具体地,算法分为以下几个步骤:
对雷达回波信号进行FFT变换,得到信号的频域表示。
将观测区域划分为若干个细胞,每个细胞的大小根据雷达系统的分辨率和探测距离来确定。
在每个细胞内计算一个门限值,门限值的计算基于细胞内的噪声统计特性,可以使用CA-CFAR算法中的常数虚警概率来确定。
对每个细胞的信号进行检测,如果信号强度超过该细胞的门限值,则判断该细胞内存在目标信号。
CA-CFAR算法具有良好的性能和可靠性,常用于雷达信号处理中的目标检测和跟踪。
Square Law Detector(SLD)是一种用于雷达信号处理的非线性检测器,主要用于提取雷达回波信号的幅度信息。
在雷达系统中,接收到的回波信号通常很弱,需要经过放大处理后才能进行后续处理。SLD是一种常见的信号放大器,它可以将接收到的微弱信号放大至足够的幅度,以便进行后续处理。
SLD的基本原理是利用二极管的非线性特性,将输入信号的平方放大,从而得到输入信号的幅度信息。具体地,SLD的放大过程可以分为以下几个步骤:
输入信号经过二极管后被整流,即取其绝对值。
整流后的信号被平方,从而得到输入信号的平方值。
平方后的信号经过低通滤波器,滤去高频噪声成分。
经过滤波后的信号就是输入信号的幅度信息。
SLD具有简单、快速、灵敏的特点,常用于雷达信号处理中的目标检测和跟踪。由于SLD的非线性特性,其输出结果可能会受到输入信号的幅度变化而发生明显的变化,因此需要进行适当的调节和校准。
雷达性能
在存在两个彼此靠近并在相同频带中工作的雷达的情况下,评估所提出的系统的检测性能。
这两个用户是从FrFT的两个不同阶唯一标识的,当FrFT的两个阶之间的差 减小时,相互干扰将增加。因此,重影目标存在将可能引起的检测性能的恶化。
雷达重影是指当两个或多个雷达系统工作在同一频段,且在相同的时间内接收到来自同一目标的回波信号时,由于回波信号的幅度和相位差异,可能会导致接收机无法正确地区分目标信号,从而出现误判或漏检的情况。
雷达的有用反射信号与干扰信号功率之比为信干比(SIR),由下式给出:
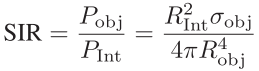
其中, 是从汽车反射的雷达信号的功率,由雷达方程计算,
是由信道衰减的用户干扰的功率,由 Friis equation 计算,分别是干扰用户和目标到主用户的距离。
和
分别是干扰用户和目标到主用户的距离。
Friis equation,又称为Friis传输方程,是一种用于计算电磁信号从发射天线到一定距离处接收到的功率的方程。
riis方程说明了在距离R处接收到的功率(Pr)是由发射天线的增益(Gt)、发射功率(Pt)、波长(λ)和距离(R)决定的。接收天线的增益为Gr。具体表达式如下:
Pr = (Pt * Gt * Gr * λ^2) / (4 * π * R)^2
其中,Pt为发射功率,Gt为发射天线增益,Gr为接收天线增益,λ为波长,R为距离。
Friis方程常用于无线通信和雷达系统设计中,用于估算链路预算,即发射功率和接收功率的平衡,并优化系统参数,如天线增益和发射功率。
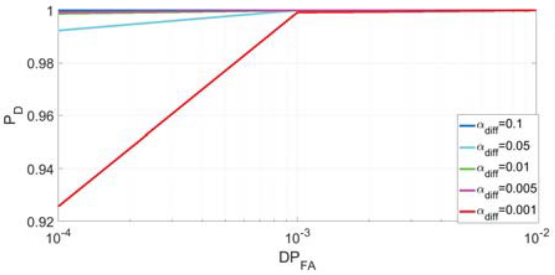
接收器:检测概率()与所需虚警率概率(
)的关系图
虚警概率 与
的关系:
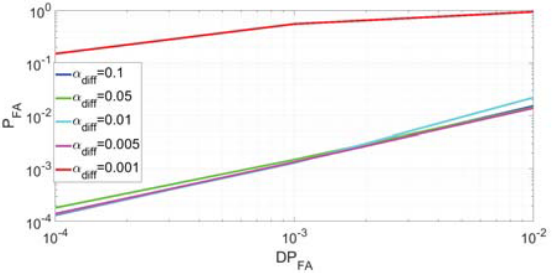
是指在检测目标时,系统误报目标的概率。在实际应用中,由于噪声、杂波等干扰,雷达系统可能会误判某些噪声或干扰为目标,这样就会产生虚警。虚警概率越低,说明系统误判为目标的概率越小,系统的检测能力越强。
是指在一定时间内,雷达系统期望发生虚警的概率。它是由虚警次数和总检测次数计算得出的,是一个平均值。虚警率概率越低,说明系统的误报目标的平均次数越少,系统的性能越好。
论文实验中的阈值设置和特定SNR:阈值基于CA-CFAR,而SNR为-8 dB。是基于虚警次数和试验次数计算的,而
是根据试验次数的检测次数给出的(蒙特卡洛)。
用于获得图2和图3所示结果的蒙特卡罗模拟次数由下式给出:
![]()
是获得
所需的蒙特卡罗运行次数。在
=10−4、10−3、10−2的情况下评估性能。
不同αdif值下主用户和干扰用户之间的互相关:
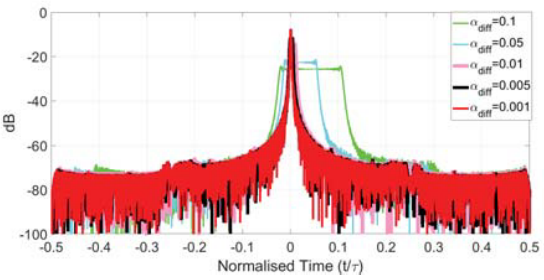
当αdiff从0.1移动到0.001时,互相关强度增加
高的互相关会导致诸如重影目标的问题,这将增加错误警报的数量并且导致检测雷达目标的灵敏度的损失。
通信性能
论文为了评估通信性能,假设信号经历慢平衰落,因此考虑了时不变窄带信道模型。
令 为包含发射信号样本的向量。所接收的信号可以被写为:
![]()
其中,h是包含信道系数的向量,n是高斯白色噪声,算子表示哈达玛乘积。
假设接收的信号已经被均衡,则根据误比特率(BER)针对不同的SNR值来评估通信性能。
论文考虑了道路中的不同情况,如图四种不同信道模型的通信性能:AWGN、莱斯、瑞利和对数正态分布。
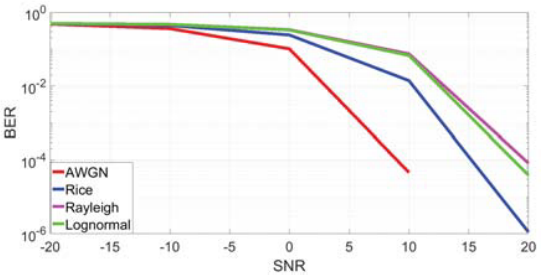
这篇论文针对不同环境下的两辆相邻车辆对所提出的系统进行了评估。仿真分析表明,在存在两个用户的情况下,可以将它们分配在同一频带中,而FrFT的阶数具有小的差异。通信性能测试表明,该系统可以在不同的环境下工作,并具有良好的误码率。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











