







引言
既然已经搜索到我这篇博客了,想必各位就是搞地图匹配算法相关的小伙伴了。那么,地图匹配的概念我就不废话了。
讲讲地图匹配目前发展状况吧,基于高频GPS采样的地图匹配算法太多了,随便一搜基本都是高频GPS采样的论文,虽然一般的文章不会告诉你,但是从实验效果图就能看得出来(毕竟采样点那么密集)。但是,现在低频GPS采样也开始进入了火热的研究,但是难度可比高频GPS采样大,毕竟数据稀疏。
随着郑宇博士基于低频GPS采样的ST-Matching匹配算法的提出,各种低频GPS采样的算法也开始多了起来。随后,郑宇博士基于ST-Matching算法又提出了一个IVVMM(An Interactive-Voting Based Map Matching Algorithm)算法,当然这种也是基于低频GPS采样的地图匹配算法。
后来,软件学报出来了一篇“路网匹配算法综述”,对目前地图匹配算法进行了一个概述,也明确指出针对低频GPS采样的研究是一个很有发展潜力的方向。
em…好像说得有点多了。进入正题:
今天我们简单谈谈ST-Matching算法和IVVMM算法。
一开始,我看这两个文章的时候,有点懵,不太理解里面的控件分析函数和时间分析函数。后来还是“路网匹配算法综述”这篇文章把我讲清楚了,原来就是基于隐马尔科夫模型的一个东西而已。
另外,再提供一个改进的IVVMM的中文版,论文题目:“IIVMM:针对低频 GPS轨迹的改进交互式投票匹配算法”。
知识储备
隐马尔科夫模型(Hidden Markov Model,HMM): 它是一种统计模型,它来描述一个含有隐含未知参数的马尔科夫过程。它包含5个元素,其中2个状态集和3个概率矩阵。
- 隐含状态S:这些状态是隐马尔科夫性质,是马尔科夫模型中实际所隐含的状态。这些状态通常无法直接观测而得到。与地图匹配相对应的就是:比如当前待匹配GPS点P,它有多个候选匹配点c1,c2,这些候选点隐状态。
- 可观测状态O:在模型中,与隐状态相关联,可通过直接观测而得到。与地图匹配对应的就是:待匹配点就是可观测状态。
- 状态转移概率矩阵A:描述隐马尔科夫模型中各个状态之间的转移概率。就是说上一个候选匹配点和下一候选匹配点之间的关系,可以表示成概率的形式。
- 观测状态概率矩阵B:表示在t时刻隐状态条件下,其对应的观测状态的概率。
- 初试状态概率矩阵π:表示隐状态在初始时刻t=1的概率矩阵。
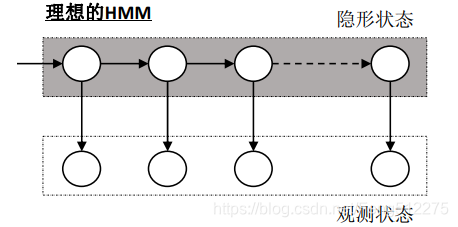
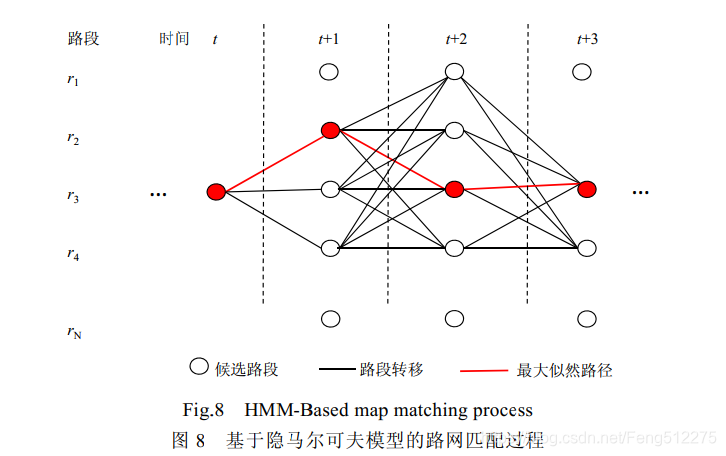
我们要做地图匹配,给定下面一组待匹配GPS轨迹点序列(观测状态),然后要找到一条匹配的路径\或一组匹配点序列(隐状态)。
隐马尔可夫模型是有条件限制的:隐状态的变量是离散的取值,观测状态的变量可以是连续的、也可以是离散的。在任一时刻,观测状态的变量依赖于对应的隐状态变量,与其他时刻的隐状态变量和观测变量无关。并且,t时刻的隐状态变量仅依赖于t-1时刻的隐状态变量,与其余的无关,这就是“马尔科夫链”,即:系统下一时刻的状态仅由当前状态决定,不依赖于以往的任何状态。
既然,地图匹配研究是满足条件的啦~毕竟是时间序列的嘛
再来几组对应的图片吧:
正文
有了上面作为基础,那么先开始说说ST-Matching算法。

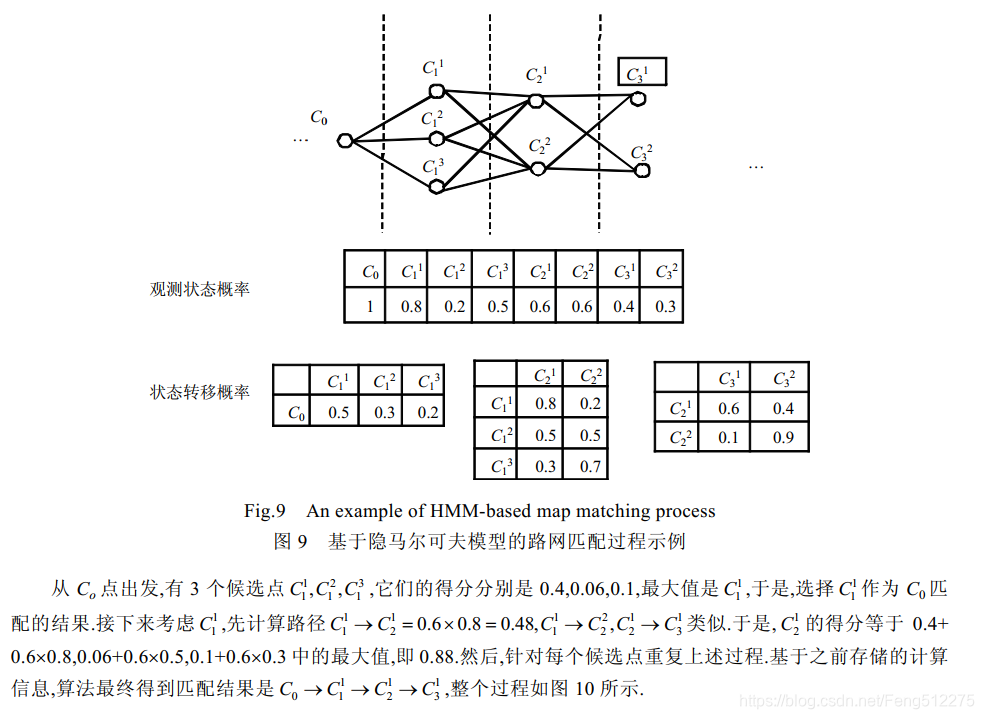
观测概率矩阵出来了~
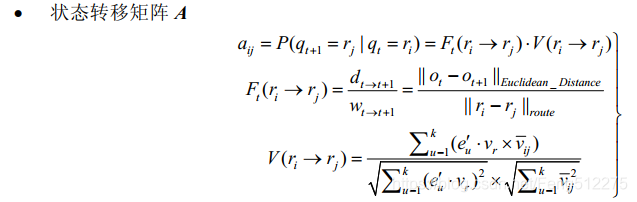
状态转移概率矩阵也出来了~
当然,图片里面的状态转移矩阵不应该这么多,应该就只有只有中间那个。因为ST算法后面把空间分析函数和时间分析函数作了乘积,所以这里就直接写在一起了。准确地来说,只有空间分析函数是对应了隐马尔科夫模型的观测概率矩阵和状态转移概率矩阵。
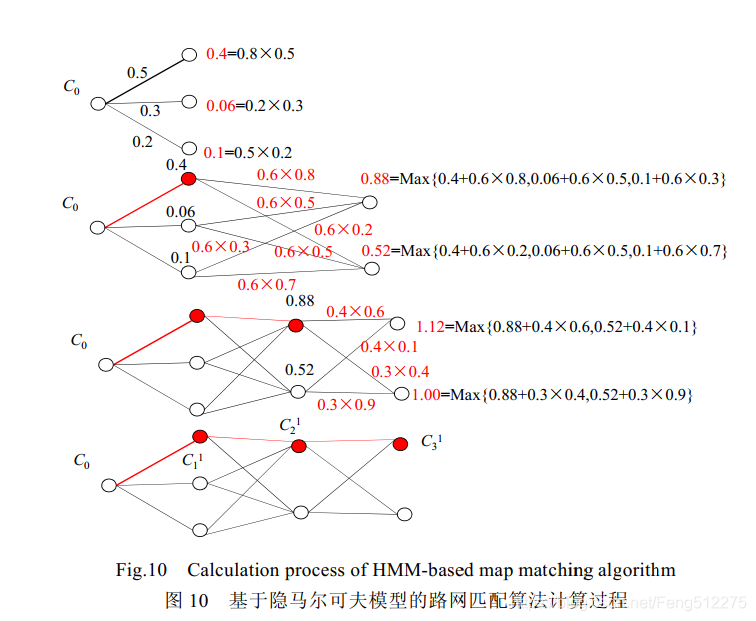
然后呢,他把空间分析函数和时间分析函数的结果算出来,候选节点哪个结果最大,就作为匹配的点。很简单吧~!
OK,ST-Matching算法讲完了,接下来就是IVVMM算法。
IVVMM算法实际就是在ST-Matching算法基础上增加了一个互动投票环节,再通俗点说就是做了一个动态路径规划的求解,再直白点讲相当于维特比算法。
他是怎么弄的呢,首先,ST-Matching算法不是已经把待匹配点的候选点集合都算出对应的概率嘛(观测概率矩阵、状态转移概率矩阵),比如待匹配点P,他可能有很多个候选匹配点C1、C2、C3…Cn。这些候选匹配点就能算出不同的概率。然后呢,既然所有的待匹配点对应的候选匹配点集合都算出了概率,也就是说所有条件都给出了的情况下,让你求一条路径最短的,动态规划吧~求解的时候,不一定要串行,可以并行求解,反正所有条件都是充足的了。
总结
讲完啦,本文是从思路上讲解,并没有具体到每个匹配过程,因为思路通了,细节就是自己慢慢看啦。反正关键点就是你要理解隐马尔科夫模型,你才明白他为什么要用这两个矩阵。如果还有不明白的,赶快去看看“路网匹配算法综述”这篇文章吧~
隐马尔科夫模型与地图匹配对应的过程中,如有不明白的,也可以看看这篇文章“出租车GPS数据的地图匹配算法研究”














 3284
3284











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









