






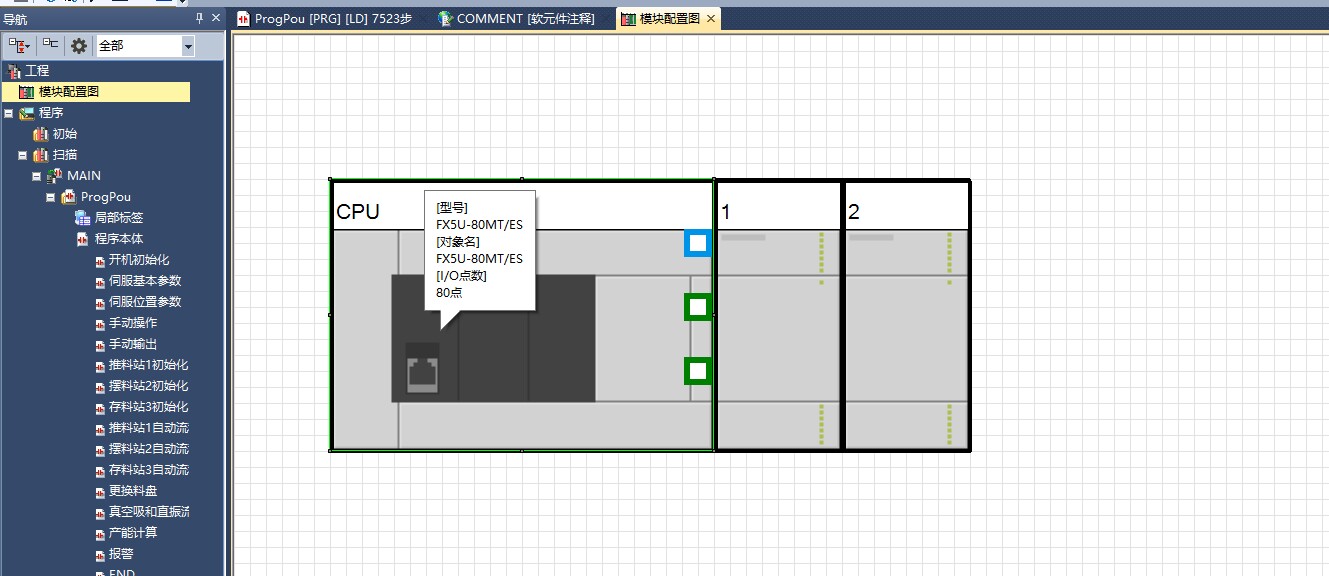
三菱PLC模板程序FX5U轴FB块 使用ST语言编写的轴FB块,包含原点复归,点动,定位运动。 FB块可以多轴重复,可节省重复编程开发时间
三菱PLC模板程序FX5U轴FB块:高效编程的利器
在自动化控制领域,三菱PLC一直以其稳定的性能和丰富的功能备受青睐。今天咱们来聊聊使用ST语言编写的三菱PLC FX5U轴FB块,这可是个能大大提升编程效率的好东西。
一、FB块的优势
FB块即功能块,它最大的优点就是可以多轴重复使用。想象一下,要是我们的设备有多轴运动控制需求,传统方式下,每轴都要写一套类似的代码,那得多麻烦。但有了这个轴FB块,咱只需要编写一次,然后在不同轴上重复调用,就能轻松实现同样的功能,极大地节省了重复编程的开发时间。
二、原点复归功能实现
原点复归是轴运动控制中很关键的一步,它确定了轴的起始参考位置。下面看看在ST语言中如何在FB块里实现原点复归功能:
METHOD Home : BOOL
VAR
HomeSpeed : REAL := 500.0; // 原点复归速度,单位根据实际情况定
Deceleration : REAL := 200.0; // 减速值
BEGIN
// 启动原点复归运动
AXIS_CTRL.AxisHome(
Axis := AXIS_NO,
Velocity := HomeSpeed,
Deceleration := Deceleration,
Complete => HomeComplete,
Error => HomeError
);
// 等待原点复归完成
WHILE NOT HomeComplete AND NOT HomeError DO
// 这里可以添加一些状态监控代码,比如显示当前运动状态等
Home := FALSE;
END_WHILE;
IF HomeError THEN
// 处理错误,比如报警输出等
Home := FALSE;
ELSE
Home := TRUE;
END_IF;
END_METHOD;
在这段代码里,首先定义了原点复归的速度 HomeSpeed 和减速值 Deceleration。然后通过 AXIS_CTRL.AxisHome 函数启动原点复归运动,这个函数需要传入轴号 AXIS_NO 以及速度和减速参数。接着使用 WHILE 循环等待原点复归完成或者出现错误。如果出现错误,就返回 FALSE 表示原点复归失败;如果成功完成,就返回 TRUE。
三、点动功能实现
点动功能允许轴按照指定的方向和速度进行短距离移动,在调试和手动操作时非常实用。
METHOD Jog : BOOL
VAR
JogSpeed : REAL := 300.0; // 点动速度
JogDir : INT; // 点动方向,1为正方向,-1为负方向
BEGIN
// 根据传入的方向参数确定点动方向
IF JogDirection THEN
JogDir := 1;
ELSE
JogDir := -1;
END_IF;
// 启动点动运动
AXIS_CTRL.AxisJog(
Axis := AXIS_NO,
Velocity := JogSpeed * JogDir,
JogComplete => JogComplete,
Error => JogError
);
// 等待点动完成或者出错
WHILE NOT JogComplete AND NOT JogError DO
// 同样可以添加状态监控
Jog := FALSE;
END_WHILE;
IF JogError THEN
Jog := FALSE;
ELSE
Jog := TRUE;
END_IF;
END_METHOD;
这里先根据传入的 JogDirection 参数确定点动方向 JogDir,然后通过 AXIS_CTRL.AxisJog 函数启动点动运动,传入轴号、速度(根据方向调整正负)。最后和原点复归类似,等待点动完成或者处理错误返回相应结果。
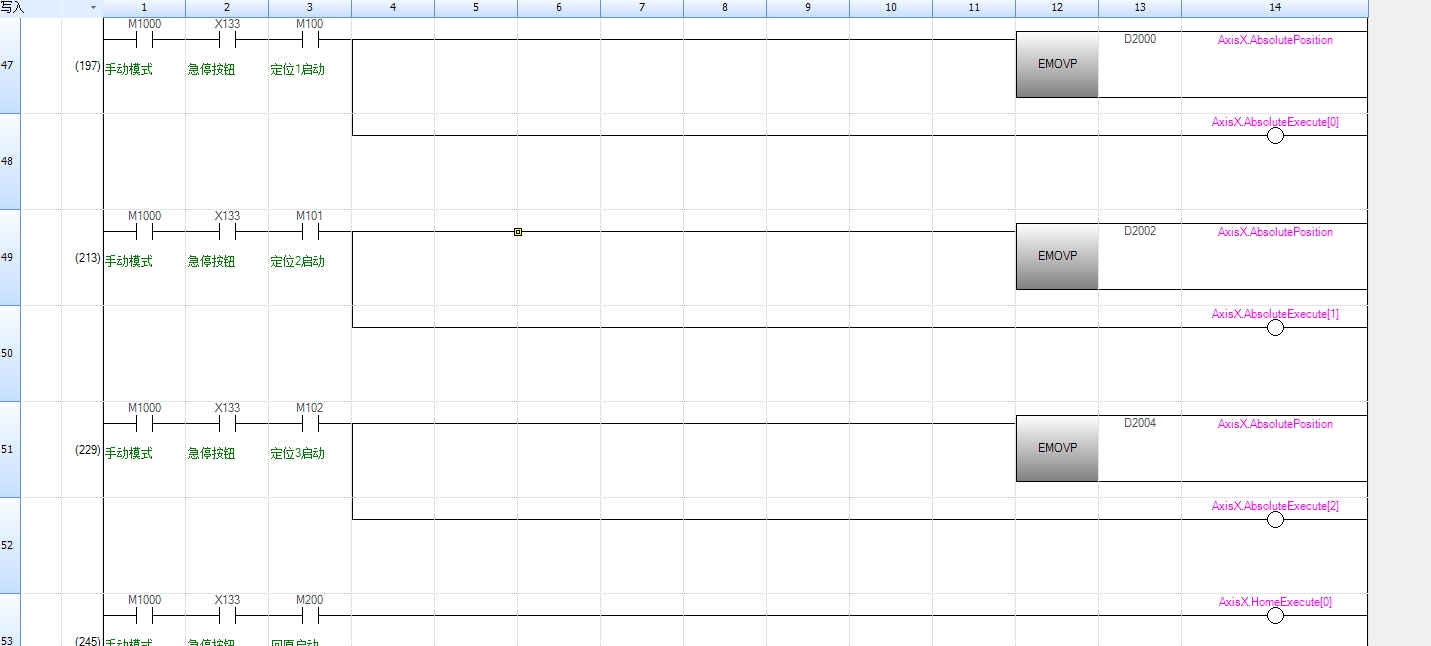
四、定位运动功能实现
定位运动是让轴移动到指定的目标位置,这是轴控制中最常用的功能之一。
METHOD MoveToPosition : BOOL
VAR
TargetPosition : REAL; // 目标位置
MoveSpeed : REAL := 800.0; // 移动速度
Acceleration : REAL := 300.0; // 加速度
Deceleration : REAL := 200.0; // 减速值
BEGIN
TargetPosition := SetPosition; // SetPosition为外部传入的目标位置参数
// 启动定位运动
AXIS_CTRL.AxisMoveAbsolute(
Axis := AXIS_NO,
Position := TargetPosition,
Velocity := MoveSpeed,
Acceleration := Acceleration,
Deceleration := Deceleration,
Complete => MoveComplete,
Error => MoveError
);
// 等待定位完成或者出错
WHILE NOT MoveComplete AND NOT MoveError DO
// 可添加状态显示等代码
MoveToPosition := FALSE;
END_WHILE;
IF MoveError THEN
MoveToPosition := FALSE;
ELSE
MoveToPosition := TRUE;
END_IF;
END_METHOD;
此段代码首先获取外部传入的目标位置 SetPosition 赋值给 TargetPosition,接着通过 AXIS_CTRL.AxisMoveAbsolute 函数以绝对定位的方式启动运动,传入轴号、目标位置、速度、加速度和减速值等参数。最后等待定位完成或者处理错误返回结果。
通过这个使用ST语言编写的三菱PLC FX5U轴FB块,把原点复归、点动和定位运动这些常用的轴控制功能集成在一起,并且能方便地在多轴中重复使用,大大简化了编程流程,提高了开发效率,为自动化项目的实施提供了有力的支持。无论是新手还是经验丰富的工程师,都值得深入研究和使用。
三菱PLC模板程序FX5U轴FB块
使用ST语言编写的轴FB块,包含原点复归,点动,定位运动。
FB块可以多轴重复,可节省重复编程开发时间






















 1445
1445

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









