






保姆级RRT+Dijstra基于目标导向优化改进的路径规划算法,机器人路径规划导航RRT,有算法matlab源文件,可直接运行,适合初学者学习,
双向RRT+Dijstra,单向RRT+Dijstra都有,都是做了改进的。
仅供学习使用!
ID:4388672979194488
NWYR
保姆级RRT+Dijkstra基于目标导向优化改进的路径规划算法
摘要:路径规划是机器人导航中的核心问题之一。本文基于Rapidly exploring Random Tree (RRT) 算法和Dijkstra算法,提出了一种保姆级的路径规划算法,以实现更高效,更优化的机器人导航。
-
引言
路径规划是机器人导航领域中至关重要的问题。通过智能算法和优化技术,实现高效的路径规划,可以大大提高机器人的性能和效率。RRT是一种常用的路径规划算法,而Dijkstra算法则是一种常用的图搜索算法。本文基于RRT和Dijkstra算法,结合目标导向优化,提出了一种改进的路径规划算法,以实现更好的导航效果。 -
RRT算法简介
RRT是一种基于无向图的路径规划算法,通过随机采样和扩展节点的方法,生成一棵树状结构,从起点向目标点扩展,最终得到一条路径。然而,传统的RRT算法存在探索效率低下和路径质量不高的问题。本文通过对RRT算法的改进,提高了算法的效率和路径的质量。 -
Dijkstra算法简介
Dijkstra算法是一种广度优先搜索算法,用于计算图中两个节点之间的最短路径。然而,传统的Dijkstra算法存在计算复杂度高和内存占用量大的问题。本文通过对Dijkstra算法的改进,提高了算法的计算速度和内存利用率。 -
保姆级RRT+Dijkstra算法的改进
本文通过将RRT和Dijkstra算法相结合,实现了一种保姆级的路径规划算法。具体来说,我们使用改进的RRT算法生成路径树,然后使用改进的Dijkstra算法进行最短路径搜索,从而得到一条优化的路径。通过目标导向优化,我们进一步改进了算法的搜索效率和路径质量。 -
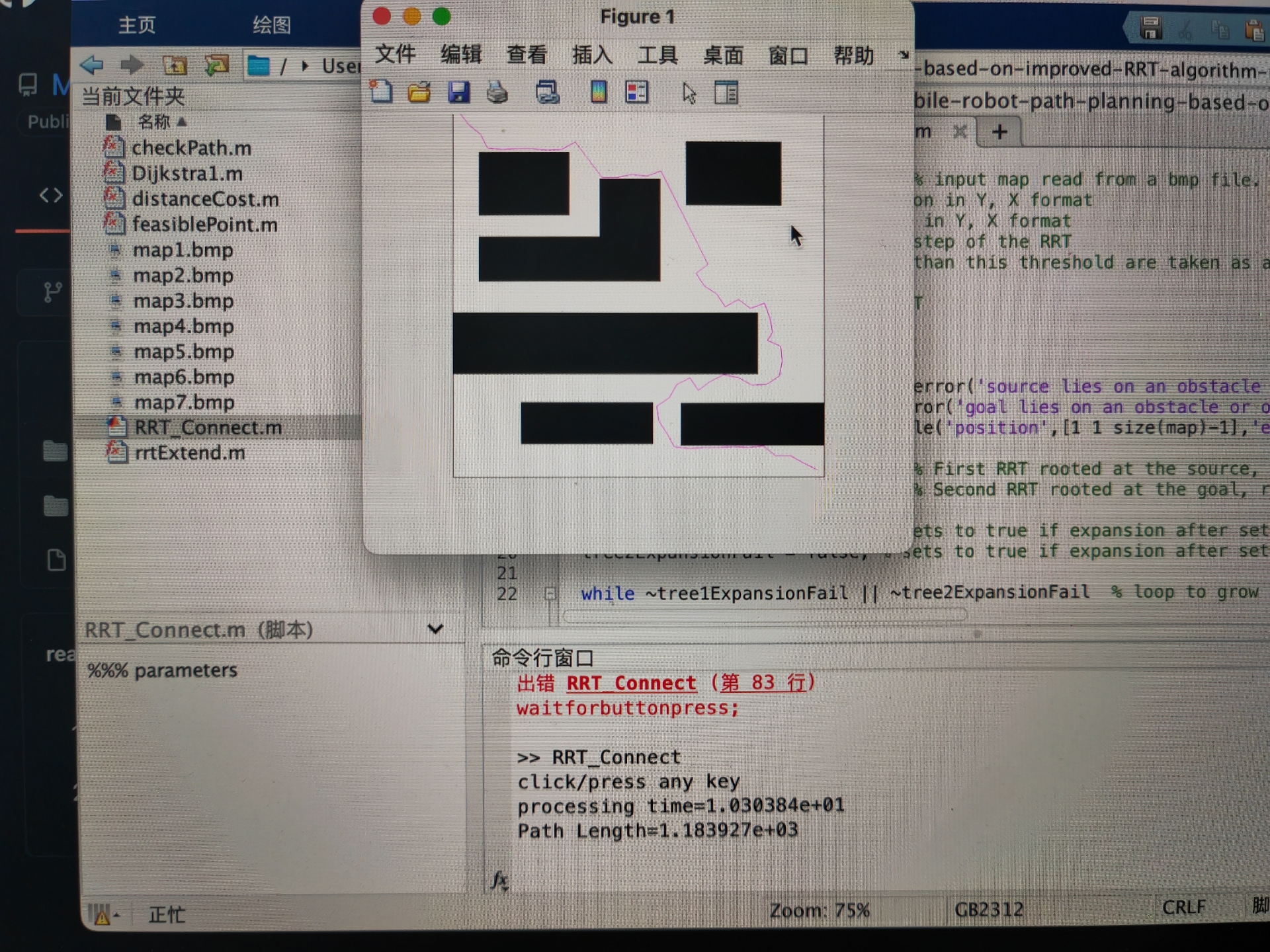
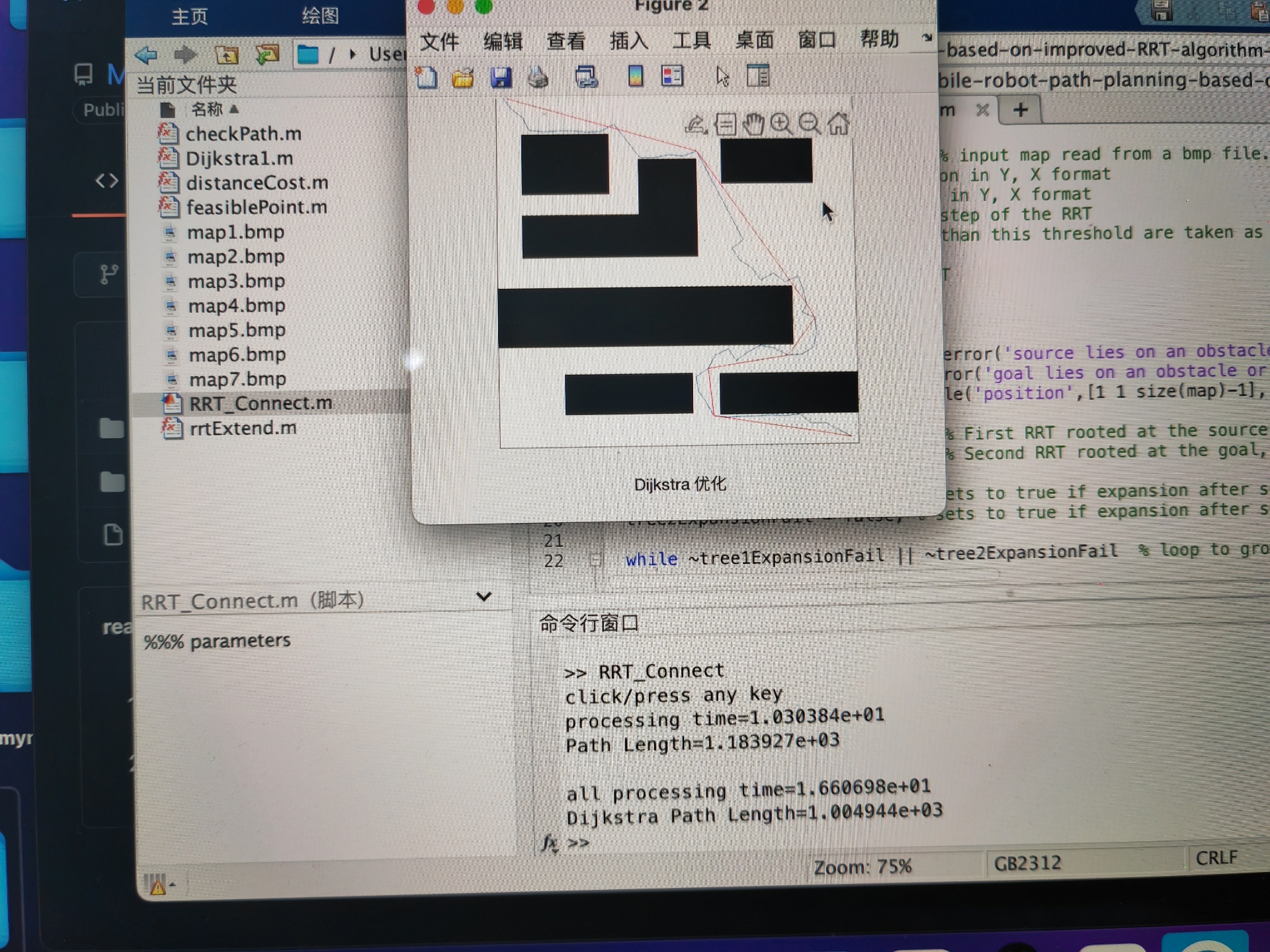
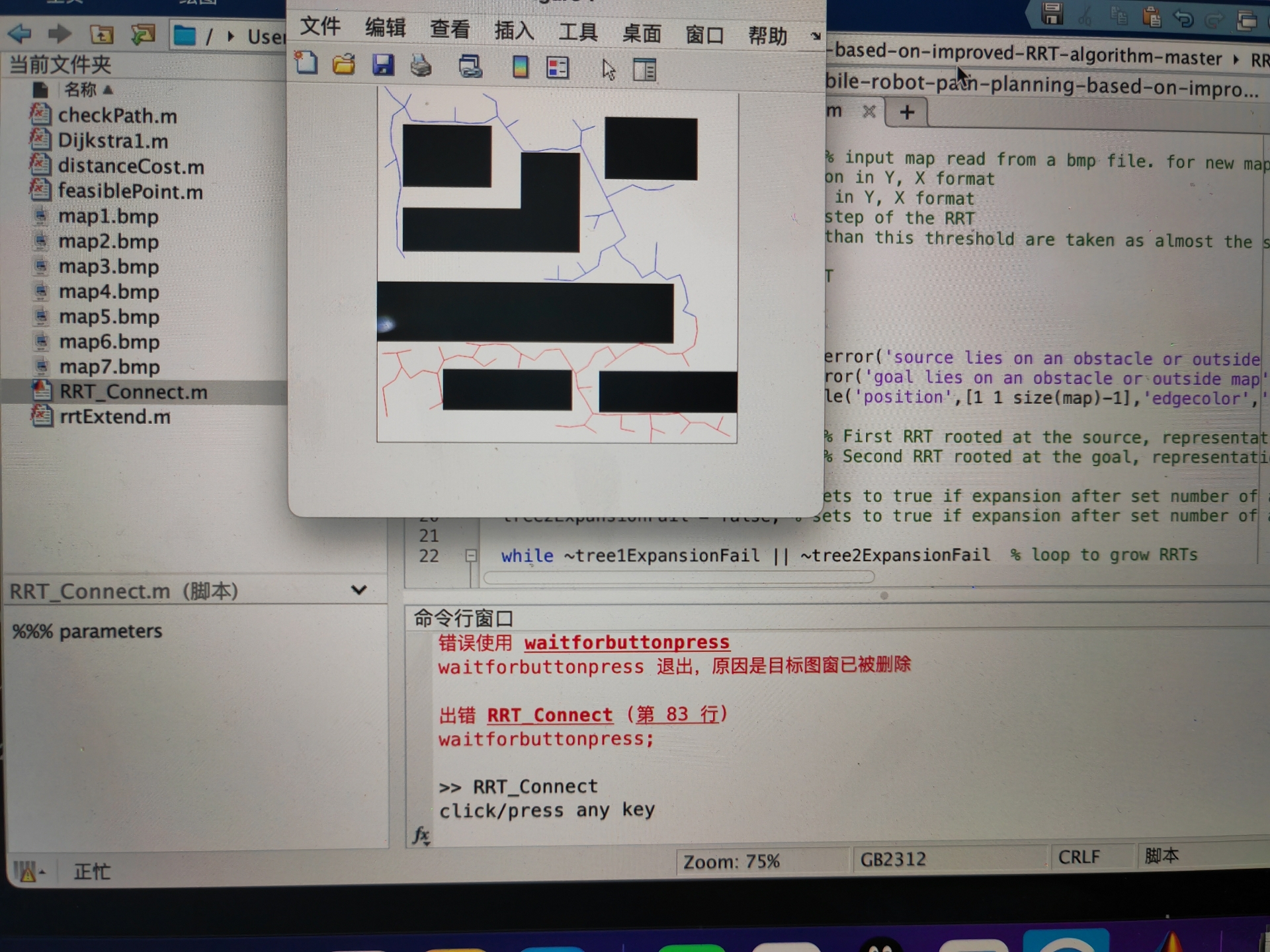
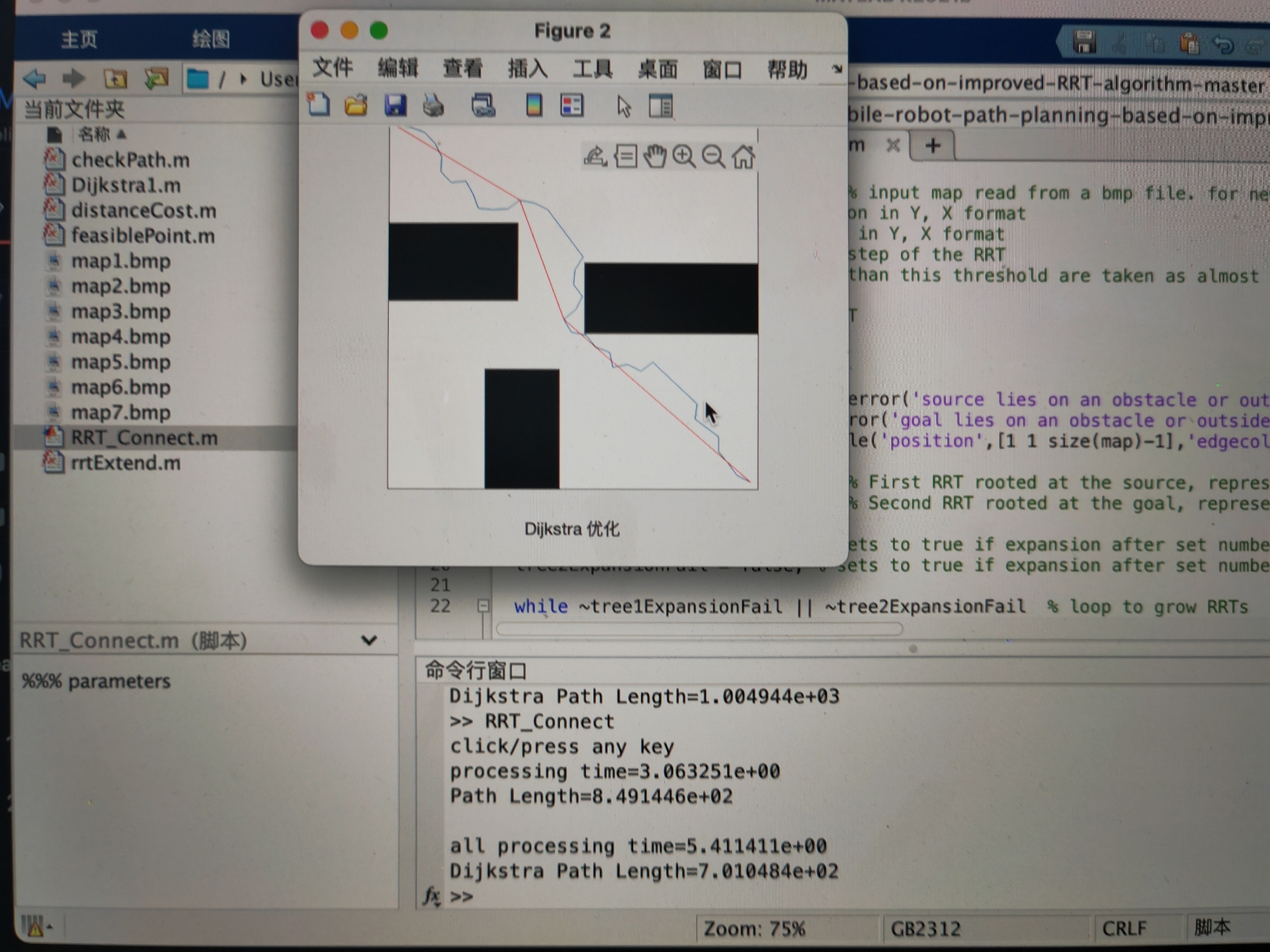
实验与结果
为了验证本文所提出的算法的性能和效果,我们进行了一系列实验。实验结果表明,改进的RRT+Dijkstra算法在路径规划效率和路径质量方面均优于传统的RRT算法和Dijkstra算法。算法提供的Matlab源代码也可供初学者学习使用。 -
结论
本文基于RRT和Dijkstra算法提出了一种保姆级的路径规划算法,通过目标导向优化,实现了更高效,更优化的机器人导航。实验结果表明,改进的算法在性能和效果上表现出色,具有很高的实用价值。同时,提供的Matlab源代码也为初学者提供了一个学习和研究的平台。
参考文献:
[1] Lavalle, Steven M. “Rapidly-exploring random trees: A new tool for path planning.” Technical Report TRITA-CSC-A, 1998.
[2] Dijkstra, E.W. “A note on two problems in connexion with graphs.” Numerische Mathematik, 1:269–271, 1959.
相关的代码,程序地址如下:http://wekup.cn/672979194488.html
















 608
608











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









